
基于正交试验的仿人手指传感器多参数分析与优化
2019-04-25 08:49张文奇曹文斌
载人航天 2019年2期
张文奇,陈 萌,曹文斌
(上海宇航系统工程研究所,上海201109)
1 引言
空间任务随着复杂程度的不断加剧,机器人在轨灵巧操作的要求越来越高。针对目标的表面温度、粗糙度、接触力等物理属性,现有空间机器人手指传感器的灵敏度和精确度都存在不足,无法满足未来空间机器人精确感知目标物理属性和智能抓取的需要[1]。
目前国内外多利用固体形式压力传感器进行信号传导,以提升空间机器人手指传感器对目标物理属性灵敏度和精确度[2],但无法满足对温度、压力、微振动等多种物理信号的感知。使用流体作为传导介质可以实现对多种物理信号的感知,但存在传动建模困难、数据分析不全面以及流体密封差等问题亟待解决。
多因素正交试验中,不同因素的重要程度常常不一致,各因素的取值对不同因素的影响程度也不完全相同,所以结果分析较复杂[3],在仿人手指方面的应用比较少。本文针对现有方法在流体传导建模差、数据分析不全面等问题,引入多因素正交试验进行数据分析,借助Fluent软件完成对仿人手指传感器多参数分析与优化。
2 多参数分析与优化方法
本文设计如图1所示的内部流体导电式仿人手指传感器作为分析和优化的对象。
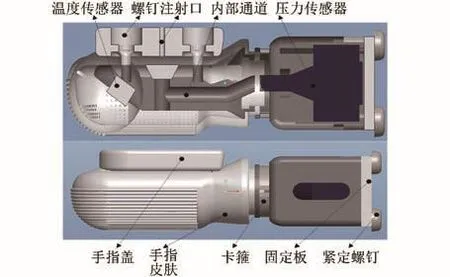
图1 手指传感器整体示意图Fig.1 Schematic diagram of finger sensor
经验表明,对手指传感器内部流体流动影响较大的因素为管径、管道弧度、粘度、内部压强。针对这组参数,将图1所示手指传感器结构导入ANSYS,在ANSYS中进行手指传感器布尔运算得到内部流体模型,对比参数变化对物理信号的衰减影响,得到的数据经正交试验得到最终的优化结果。
仿真中,粘度νm通过经验公式[4]得到,手指传感器的导电液体模型采用的标准k-ε模型方程[5]。
3 分析与优化
3.1 结构参数影响分析
针对不同内径、不同粘度[6]、不同内径弧度以及流体内部压强[7]对手指传感器出口处温度、断面压强和流体速度三个参数衰减程度的影响,设置如下工况,可得如图2~5所示定性的影响趋势:
1)压强、流体粘度、内经弧度不变,内部管径分别取2.2 mm、2.8 mm、3.5 mm;
2)压强、流体粘度、内部管径不变,管径连接处弧度设置为0、0.5 mm、1 mm;
3)内部管径、流体粘度、内经弧度不变,内部导电液体压强设置为5 Pa、10 Pa、15 Pa;
4)压强、内部管径、内径弧度不变,流体粘度设置为 0.2 cP、0.02 cP、0.002 cP。
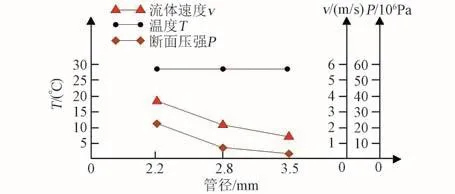
图2 管径对流体的影响Fig.2 Influence of pipe diameter on fluid
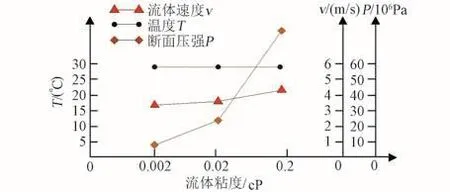
图3 流体粘度对流体的影响Fig.3 Effect of fluid viscosity on fluid
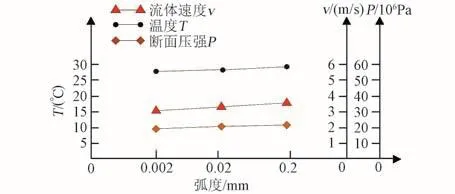
图4 弧度对流体的影响Fig.4 Effect of radian on fluid
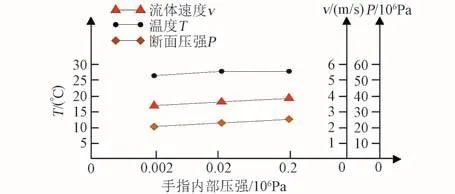
图5 手指内部压强对流体的影响Fig.5 Influence of internal pressure on the fluid
3.2 正交试验优化
考察手指内部管径、流体粘度、手指内部压强、管道弧度等四个因素,每个因素取三种不同的水平级数值,列出因素水平表如表1所示。本试验为四因素三水平试验,选用正交表L9(34),把各因素依次入列如表2所示。提炼其中数据,可得因素与指标的趋势如图6所示
由图6可知:对于温度来说,极差均很相近,在流体速度以及截面压强上考虑,C、D两因素的极差很相近,但是B因素的极差较大,所以可得四个因素的主次顺序为BACD。
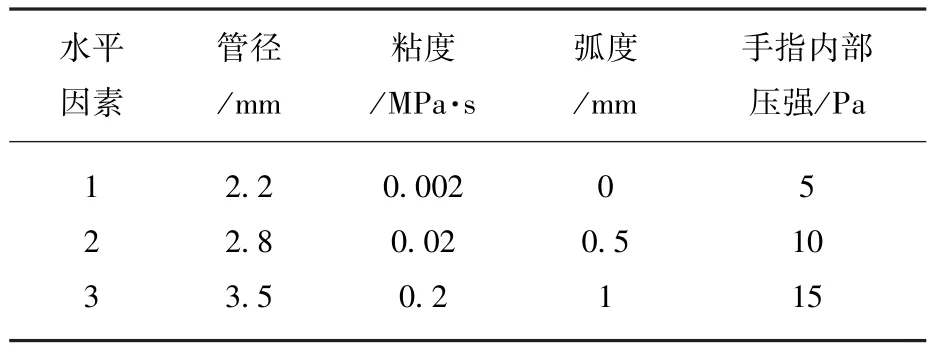
表1 因素水平表Table 1 Factor levels
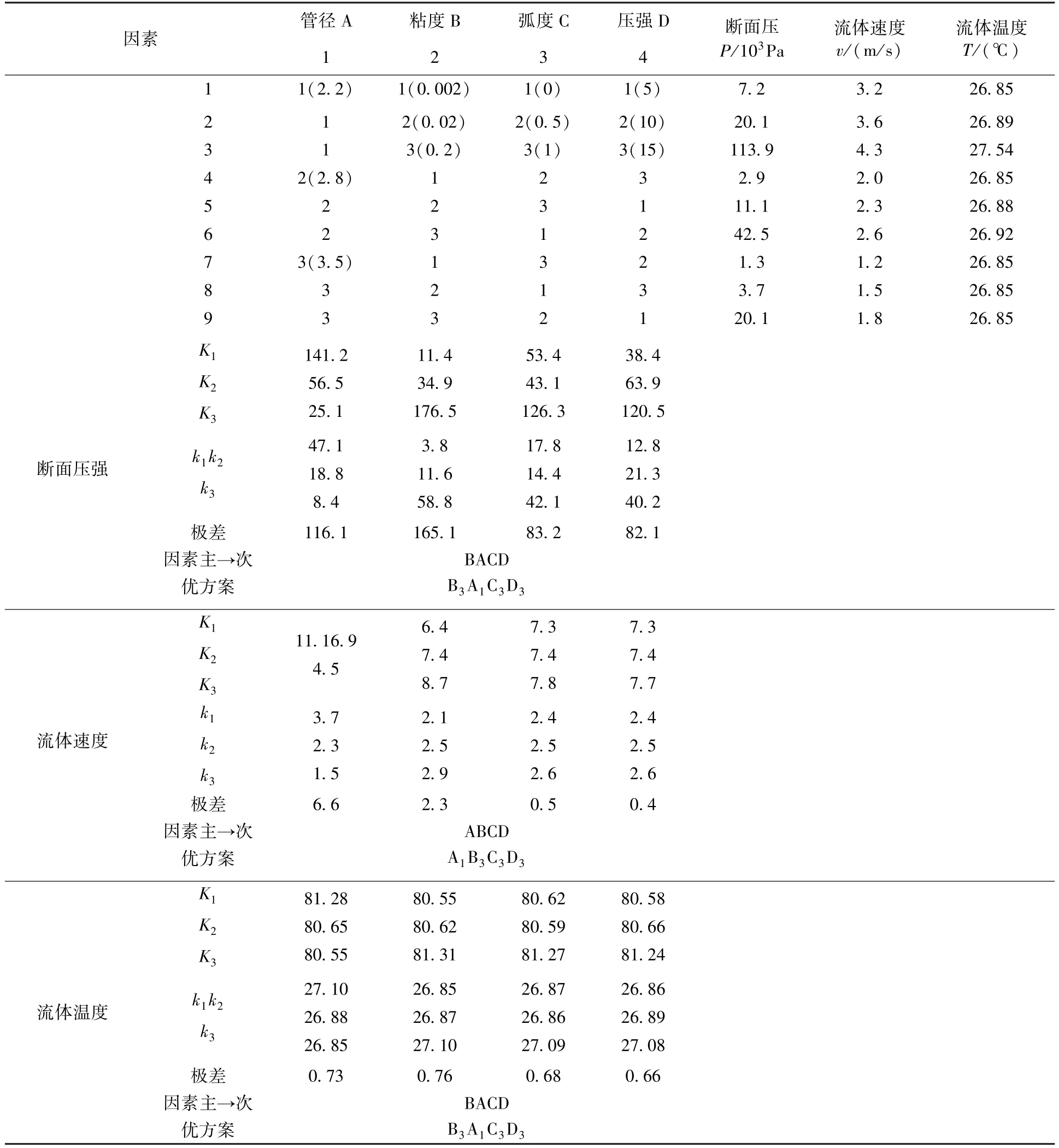
表2 试验方案及试验结果分析Table 2 Test plan and test result analysis

图6 因素与指标趋势图Fig.6 Trends of factors and indicators
B因素极差变化最显著,因此是主要因素,说明粘度越大,最终获得的优化指标越好,因此选择B3。A因素的方差变化略小于B,管径越小,说明最终获得的指标效果越更好,因此选择A1。C因素只是对压强单个指标影响显著,弧度越大对于最终指标影响较好,因此选择C3。D因素对于压强影响较为明显,D因素的值越大对优化指标越有利,因此选择D3。因此可得手指内部通道结构以及流体参数最优条件选择为B3A1C3D3,即当粘度系数为 0.2 MPa·s、管径为 2.2 mm、弧度为1 mm、内部压强为15 Pa时,外界温度、断面压强、流体速度数值最大,采集数据在此条件下损失最少,获得的信号灵敏度和精度最高。
3.3 测试验证
对上文优化参数结构所得手指传感器进行微振动信号测试,结果如图7所示。可见,原传感器需要经过相对较长时间才可以达到稳定,优化后手指传感器对振动信号的感知更加迅速。
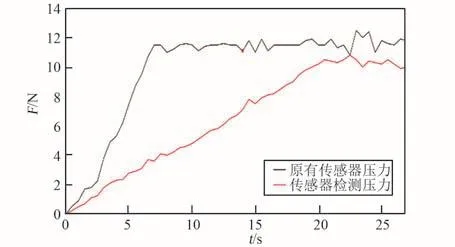
图7 新旧手指传感器压力测试响应Fig.7 Pressure test responses of new and old finger sensors
4 结论
正交试验优化所得粘度系数为0.2 MPa·s、管径为2.2 mm、弧度为1 mm、内部压强为15 Pa的仿人手指传感器方案经验证,得到的外界温度、断面压强、流体速度数值最大,数据采集损失最少,信号灵敏度和精度最高,能够更加敏感地获得精确的触觉数据。
猜你喜欢
吉林电力(2022年1期)2022-11-10
能源工程(2022年2期)2022-05-23
大众科学(2020年7期)2020-10-26
散文诗世界(2019年6期)2019-09-10
科技视界(2017年28期)2018-01-09
诗潮(2017年2期)2017-03-16
中学生数理化·高一版(2016年4期)2016-11-19
作文周刊·小学一年级版(2016年5期)2016-08-11
Coco薇(2016年7期)2016-06-28
科技与创新(2016年3期)2016-03-15
