水下建筑物高程液体静力水准测量方法与关键指标评价
2019-04-23 02:52郭强
陕西水利 2019年3期
郭 强
(上海海科工程咨询有限公司,上海 200231)
0 引言
高程测量是水下工程中一项重要工作内容,受水体阻隔限制,岸上测量方法和设备无法直接运用。目前工程中一般测量方法有:
1)光学/GPS 测量,在围堰法干式施工中常用,与岸上相同;
2)测深杆测量,在抛石护坡、水下填埋等精度和要求不高情况下进行抽样检查检测时常用,效率低、精度一般较差;
3)水下声呐测量,广泛运用在各种工况的水深测量中,效率高、整体精度相对好,测量精度随着水深、温度、压力、盐度、水流、底质等因素的变化而改变,特殊情况下还需要进行姿态、方向、声波曲线、波速等修正。缺点在于精度受环境因素影响较大,一般工程中仅能达到分米级,无法提供稳定的高精度(毫米级)成果[1-3];
4)其它物理测量方法,如液位测量传感器方法,通过测量压力换算成水深值,再根据潮位数据得到水下测点高程,这种方法受水位变化和水体分层影响,测量误差较大[4-5]。
基于以上理由,在水下结构施工中要求提供高精度测量成果的场合,以上方法均难以满足或者面临较大困难,而液体静力水准测量方法[6-9]在地面建筑物沉降监测中运用较为广泛,根据连通器原理,通过两管之间的液位差得到高度差。与其它测量方法相比,该方法测量精度高、可靠性好,受环境、地形、结构的影响很小。在水下结构测量中,将液体静力水准仪液位管一端置于水面船只或其它平台,潜水员携带另一端至水下结构的测量点,水面读取两端的压力差,进而计算出两点之间的高度差,然后再采用GPS 或其它光学测量方法得到水面一端的高程,减去高度差即可得到水下测点的高程。接下来对该方法的原理、设备、流程及关键指标进行详细阐述。
1 系统组成和测量原理
整个系统由水面测量部分、高程传递平台和静力水准测量设备组成。如图1 所示,水面测量部分为高精度全站仪,采用三角高程测量方法得出棱镜高程;高程传递平台由测量船、棱镜和储液桶组成,棱镜中心和储液桶“0”刻度线垂线距离保持固定值;静力水准测量设备为高精度压力传感器以及与储液桶连接的连通管,测量得到测点与储液桶“0”刻度线之间的高差。测点的高程为:

系统的测量原理为采用静力水准测量方法将传统高精度光学测量得到的高程值传递至水下建筑物测点,静力水准测量系统是一个封闭体,与外界水体隔绝,内部连通液均质、流动性好。连通管的一端连接储液桶,另一端连接高精度压力传感器。潜水员携带压力传感器至水下建筑物测点,并放置至水平状态,水面设备读取此时的压力值(内部连通液压力,而非外界水体),并根据连通液密度和重力加速度值转换成两点之间的高差,进而达到高精度高程传递的目的。高差值计算公式如下:

式中:P 为静态水准仪测得压力;ρ 为连通液密度。
静力水准测量系统与外界水体隔绝,依靠内部连通液传递压力,测量值不受潮位、水体分层等因素影响,精度高且稳定。
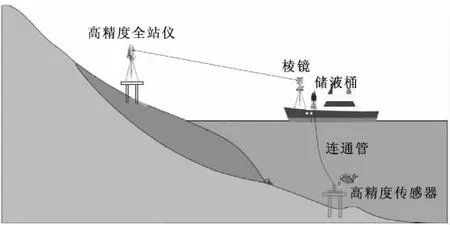
图1 测量系统组成和原理图
2 测量系统的关键指标
2.1 测量误差
该测量系统的误差来源于3 部分,包括全站仪测量误差、棱镜、储液桶的高差测量误差和静力水准系统测量误差,根据测量学误差计算方法[10-11],该系统的综合误差计算公式如下:

式中:m1为全站仪三角高程测量误差;m2为棱镜中心与储液桶“0”刻度高差测量误差,主要与船体姿态动态变化有关;m3为静力水准系统测量误差。
2.2 系统的同步测量
根据公式(1),在固定不变的情况下,测量结果决定于全站仪和静力水准系统。二者之间应当保持同步,但实际上难以达到同步状态,中间有一个间隔。在船体姿态不变,压力传感器放置稳定的情况下,对测量结果无影响。船体姿态变化时,由于压力传感器响应时间很短,应尽量缩短全站仪观测时间。在船体姿态变化较大的情况下,应采用自动化姿态跟踪测量设备。
3 工程应用
3.1 工程概况
工程位于江苏徐州大运河某处,在水下修建混凝土承台用于安装输水管道及取水头,承台采用岸上预制-水下挖坑-吊放安装的工艺。根据设计要求,承台安装后的顶面高程精度不得超过±10 cm。施工区域离岸约500 m,水深23 m~27 m 之间,因上游采淘沙,水体浑浊,水流速度小于0.1 m/s。为确保承台安装精度符合要求,采用了单波束测量定位方案,根据测量结果将承台安装后发现输水管道与取水头无法对接,承台高于设计高程达38 cm,远大于10 cm 的可调节范围,只得吊起取水头和承台重新处理填坑。经过反复分析比较,处理后填坑表面高程测量定位采用文中方法,该方法无类似工程经验,其可靠性和测量精度需进行验证。
3.2 仪器设备和流程
工程中水面高程三角测量设备采用徕卡TS30 型全站仪机器人,水下测量采用BGK-3475DM 静力水准系统,设备部分关键技术参数见表1。根据表中设备标称精度,此次测量的总体理论精度由公式(3)计算出为15 mm。

表1 测量系统设备表
根据现有条件,按照以下流程进行高程测量:
1)全站仪棱镜和静力水准系统安装到现场搭建的钢结构施工平台上,棱镜面向岸上;
2)在岸上架设全站仪观测站,设置并照准后视点,然后照准平台棱镜,设置成自动观测记录模式;
3)潜水员携带静力水准仪探头入水并到达承台填坑,根据岸上指挥选择测点并将探头水平放置到位,稳定后读取数值;
4)测量完成后,进入下一个测点,重复以上测量步骤直到完成所有测量任务。
3.3 可行性和精度验证
共选择12 个靠近岸边平坦硬底区域进行水深测量精度验证,水深均在5 m 以内,在潜水员配合下,按照文中方法和流程测量底部高程,然后采用测深杆测量方法进行验证,测深杆顶部安装棱镜,采用高精度全站仪进行高程测量。试验区水面平静,基本无水流,且多处有遗留的残桩,利于测深杆水准器对中以保持完全垂直状态。测量和对比结果如表2 所示,二者差值最大6 mm、最小0 mm。一般单波束测深仪的标称测量精度为5‰,受水流、泥沙、杂质、温度、盐度、搭载平台等各种因素的影响,实测精度一般达到10 cm 以上,在水深较深情况下可达数几十厘米,远低于该方法所测精度。

表2 高程测量结果及对比统计表
3.4 测量结果分析
安装承台前潜水员携带静力水准仪探头入水,在填坑内随机抽取5 个点进行了高程测量,同时岸上测量机器人采用跟踪模式测量棱镜高程,棱镜与静力水准仪储液桶0 刻度之间的高差为0.664 m。考虑到该系统前期试验中精度较高,同时对已安装管道的顶部高程进行测量。原始测量数据经过处理后统计结果见表3,由表可见,坑内处理后表面不平整度为11mm,承台结构高度0.2 m,管道外径1.8 m,预计取水头与已安装管道的接头高差2.2 cm。
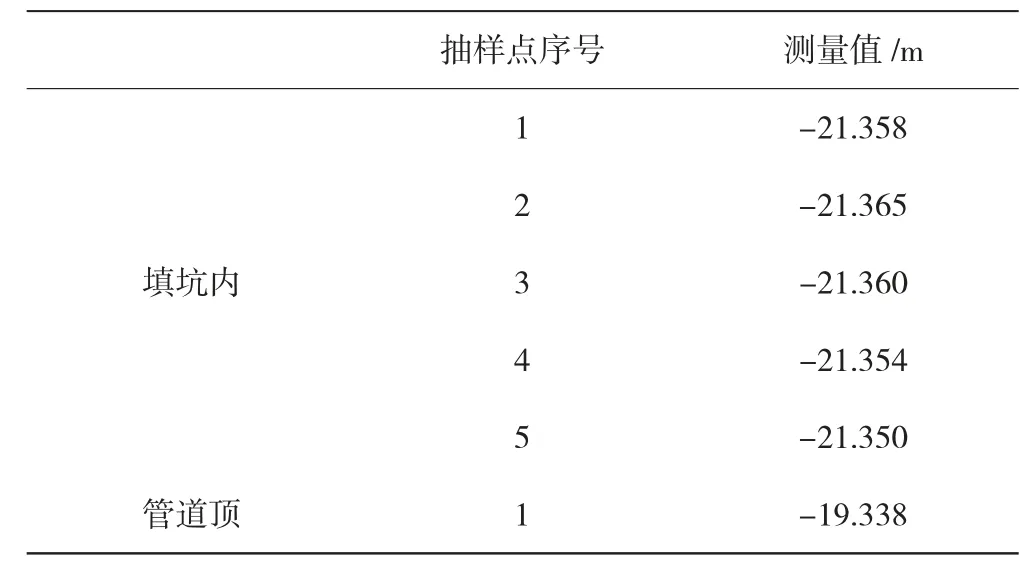
表3 高程测量结果统计表
测量完成后,吊放承台和取水头进行水下安装,吊放到位后,经潜水员水下钢尺测量,取水头与已安装管道的实际高差1.6 cm,经调节后顺利安装就位。
4 结论
(1)采用水上水下高程分段测量方法,数学模型明确,原理清晰。
(2)该方法可靠性和精度高,测量结果不受水流、温度、盐度、水体分层等因素的影响。
(3)在高程传递平台保持静止的情况下,该方法的测量误差来源于光学测量和静力水准测量两部分。在水深30 m 以内,测区离岸1 km 以内的情况,测量精度优于±3 cm,能够满足一般水下工程高精度测量的需要。
(4)工程应用结果表明,该方法适应性强,精度高,测量流程易于实现。
对该方法在测量平台保持静止的条件下进行分析研究时,由于大部分情况下受水流、风力和平台影响,棱镜和储液桶的姿态处于动态变化中,对结果造成较大影响,两者的垂直高差不能当做固定值处理,应当就姿态影响规律和修正方法作进一步研究。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
发电设备(2020年5期)2020-10-09
传动技术(2019年1期)2019-09-05
学苑创造·A版(2019年4期)2019-05-10
汽车与驾驶维修(维修版)(2017年4期)2017-07-18
中国教育技术装备(2016年22期)2017-03-02
科技资讯(2016年5期)2016-08-13
科技视界(2016年10期)2016-04-26
吉林农业(2015年6期)2015-10-16
全球定位系统(2015年4期)2015-02-28