
A Fuzzy Decision Based WSN Localization Algorithm for Wise Healthcare
2019-04-22 03:31:10JiangyuYanRanQiaoLiangruiTangChenxiZhengBingFan
China Communications 2019年4期
Jiangyu Yan,Ran Qiao*,Liangrui Tang,Chenxi Zheng,Bing Fan
North China Electric Power University,Beijing 102206,China
Abstract: Wise healthcare is a typical application of wireless sensor network (WSN),which uses sensors to monitor the physiological state of nursing targets and locate their position in case of an emergency situation.The location of targets need to be determined and reported to the control center,and this leads to the localization problem.While localization in healthcare field demands high accuracy and regional adaptability,the information processing mechanism of human thinking has been introduced,which includes knowledge accumulation,knowledge fusion and knowledge expansion.Furthermore,a fuzzy decision based localization approach is proposed.Received signal strength (RSS) at references points are obtained and processed as position relationship indicators,using fuzzy set theory in the knowledge accumulation stage;after that,optimize degree of membership corresponding to each anchor nodes in different environments during knowledge fusion;the matching degree of reference points is further calculated and sorted in decision-making,and the coordinates of several points with the highest matching degree are utilized to estimate the location of unknown nodes while knowledge expansion.Simulation results show that the proposed algorithm get better accuracy performance compared to several traditional algorithms under different typical occasions.
Keywords: WSN localization;wise healthcare;fuzzy decision algorithm;reference points;matching degree
I.INTRODUCTION
Conventional healthcare that relies on manual nursing and periodic health detection cannot provide constant and effective security insurance for nursing targets,and requires high installation cost with limited function.To deal with these problems,wise healthcare has introduced the concept of body sensor networks (BSNs),which can capture physiological signals and activity information continuously by wearable sensors [1,2].Such application of miniature wireless sensor networks in intelligent care field can increase the efficiency of resources utilization,reduce the deployment cost of equipment and improve the quality of service (QoS),and thereby improves the service and management level of healthcare.A miniature wireless sensor system captures physiological indexes and behavior patterns of targets in real time,then evaluates the health status and periodically reports their locations.In case of an emergency,alarm mechanism is also needed.Meanwhile,accurate but fast localization is required to guarantee security of nursing targets.
The existing localization algorithms in WSNs can be generally divided into two categories: ranged-based localization algorithms [3-6] and range-free algorithms [7-12].Rangebased algorithms estimate the location of unknown sensor nodes by measuring variables correlated to distance,such as angle of arrival (AOA) [3],time of arrival (TOA)[4],and time difference of arrival (TDOA) [5,6].These algorithms usually need to deploy additional facilities to acquire these measurements,and improve localization precision by multiple measurements,which results in a high cost of capital.By comparison,range-free algorithms only need information from anchor nodes and the network connectivity,thus spend less on deployment without the need for extra hardware support.However,the localization accuracy is limited.Recently,range-based algorithms which access RSS data with available wireless devices and indoor wireless technology gains much attention,and RSSs from different anchor nodes are used as fingerprints.These algorithms not only spend less on deployment,but also are proved to have more accurate localization in challenging propagation environments,such as multipath and nonline-of-sight (NLOS) environments,thus they have been widely used in recent years.Current fingerprint-based localization algorithms are mainly based on machine learning,which may quantify randomness in changing conditions for the modification of the estimation result.So they are less affected by environmental factors and adaptable to the unstable circumstances.Among them,extensive research has been conducted on neural network (NN) algorithms imitating human brain structure and function[7-11].However,the computational complexity of the NN algorithms depends on the input variables in the training stage,resulting in a costly time overhead.Besides,the positioning precision is not that ideal,hence reasoning theory based fuzzy logic localization algorithms have been gradually applied in recent years[12-14],which estimate and revise location of nodes accordingly imitating the logical inference process of humans.In paper [13],a Sugeno type-0 fuzzy inference system was proposed and the NN-fuzzy was combined to realize the localization of sensors.This approach receive an improvement in accuracy compared to NN based localization,however,the compute procedure is rather complicated.Meanwhile,aimed at determining position of mobile robots in WSNs,paper [14] proposed an improved KNN localization method,introduced a weighting factor and improved estimated location result by averaging.The computational complexity of this algorithm mentioned is low,but the position error is quite large in practice,which makes them unable to support high precision localization requirements.
To sum up,machine learning principle has been widely applied in many fingerprint based localization works while the popular NN-based localization marked a break from accessory equipment,and guaranteed the stability of the algorithms even if environmental parameters appear to be randomly changed,at the expense of a large consumption of the convergence time and operation cost.Wearable biosensors are employed by single object in the intelligent medical monitoring field,and required to be low-powered,high-efficient and durable.Fuzzy logic introduced algorithms can save the training process and correspondingly simplify the localization procedure,thus saved the computing load,but the localization accuracy needs to be further improved.Most fuzzy works focus on deriving proper fuzzy inference rules to map the measured RSSI to the fuzzy distance,then estimate the location by traditional range based algorithms,like trilateration.This work is inspired by the original WKNN principle and fusion principle and aims at assigning weights for reference points rationally based on fuzzy decision.In this way,the algorithm obtains the high precision of fingerprint based localization while saving operation time by fuzzy decision.To deal with the unevenly distribution problem of anchor nodes,the knowledge fusion process was created which aims to balance the role anchor nodes played in the dense areas and sparse areas.Besides,considering the complexity of the internal environment throughout the medical space,localization algorithm needs to be flexible in different regions to ensure users' security,and the localization robustness in different regions under different noise conditions is further explored.
This paper proposes a fuzzy decision based localization algorithm inspired by the information processing mechanism of human thinking.Decision-making is regarded as the combination of knowledge accumulation,knowledge fusion and knowledge expansion.The simulation results show that the proposed algorithm achieves high accuracy applying in different scenarios.
The rest of the paper is organized as follows.Section II presents the fuzzy decision based localization model.In Section III,the positioning process are formulated,and the relative errors of the proposed algorithm and other three methods are compared.Section IV draws the conclusion that the fuzzy decision based localization algorithm is proved to be suit in wise healthcare and other fields.
II.FUZZY DECISION BASED LOCALIZAITON
In this paper,the medical environment is divided into multiple areas according to different application scenarios,and each area is a square of the same size.Uniform grids are distributed in the localization areas,and the vertices of each grid are taken as the virtual reference points.Anchor nodes are scattered to the monitor areas stochastically.In the offline phase,RSSs from different anchor nodes are measured at each reference point,thus establishing the original database;in the localization phase,the unknown nodes obtain RSSs from different anchor nodes.Then through the process of knowledge accumulation,knowledge fusion and knowledge expansion could realize position estimation of unknown nodes.
(I) Knowledge accumulation: Supposing that there arenvirtual reference points,manchor nodes andlunknown nodes.Reference points are taken as decision objectsAi(1 ≤i≤n),RSS from anchor nodejthat measured at reference pointiisrij(1 ≤j≤m,1 ≤i≤n) while that measured by unknown nodeskisrkj(1 ≤j≤m,1 ≤k≤l).Then transform them into the matrices of the membership degreesµijthat reflect the similarity between the distance from the reference points to the anchor nodes and the distance from unknown nodes to the anchor nodes .
(II) Knowledge fusion: Considering the diverse attenuation of radio signal from each anchor nodes in the changing surroundings,the difference of membership degrees between virtual reference points corresponding to each anchor nodes vary greatly in the original database,hence it is necessary to reduce the effect of ambient uncertain and unpredicted factors on signals of different anchor nodes.By assigning weights for anchor nodes based on the dispersion of membership degrees,then the normalized attribute matrixis constructed.
(III) Knowledge expansion: Selecting an appropriate decision criterion to judgeAi,and the location matching degree between virtual reference points and unknown nodes are computed.Then this algorithm further sorts the reference points and estimates the position of known nodes.
2.1 Knowledge Accumulation
As location of anchor nodes are known and RSS from each anchor nodes been measured by unknown nodes,distance between anchor nodes and unknown nodes can be calculated by the path loss model,thus unknown nodes can be roughly estimated.However,due to the omission of electromagnetic interference and signal fading,this approach achieves high actual localization error.The fuzzy decision theory which makes use of the fuzzy logical association between unknown nodes and virtual reference points improves fault tolerance and position precision of the algorithm.In this paper,the membership degrees representing the geographical similarity between reference points and unknown nodes are determined by the ratio of the RSS distance between reference points and anchor nodes and the RSS distance between unknown nodes and anchor nodes.The geographical relationship between reference points,anchor nodes and unknown nodes is presented in figure 1.
For anchor nodej,the membership degreesµikjcharacterizing the distance association between reference pointiand unknown nodekare formulated as:
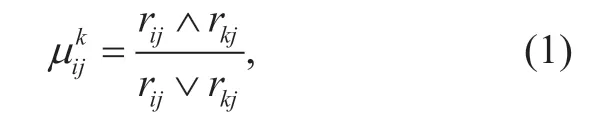
whererijandrkjare defined as the RSSs from anchor nodejmeasured at reference pointiand unknown nodek,respectively.
In terms of an anchor node,ifµikj→1,we can refer that the unknown nodeklocates near the circumference with anchorjas center andrijas signal strength radius,and that does not necessarily mean the location of the unknown nodekis near the reference pointias suggested in fig 1.Sensors perceive their own RSSs information,after that whole RSSs information become available by coordination between sensors and the membership degree matrix of unknown nodejcan be constructed.
2.2 Knowledge fusion
The weight of membership corresponding to each anchor node should be assigned according to the accumulated knowledge,so that the knowledge can be adaptively integrated based on the monitoring of the localization areas by sensors.Since sensors are randomly deployed,the relationship between RSSs and distance varies for wireless signals from diverse anchor nodes.Therefore,the membership degrees corresponding to different anchor nodes are given different weight coefficients to amend the deviation.The weight coefficient vector of the membership degree isWhen the membership degrees of anchor nodejat all reference points are quite different,it means that the RSSs of signals from anchor nodejvaries greatly due to the difference between distances from reference points to anchor nodejand the uncertainty in the localization area,hence the weight of the membership degree of anchor nodejshould be set to a relative large value,thus reference points could be easily distinguished;otherwise,this indicator is given a small weight.For anchor nodej,deviation between reference pointiand other reference points can be presented as:

For anchor nodej,deviation between all reference points and other points is:

The membership degrees of anchor nodes are given different weight,and the total deviation after equilibrium is:

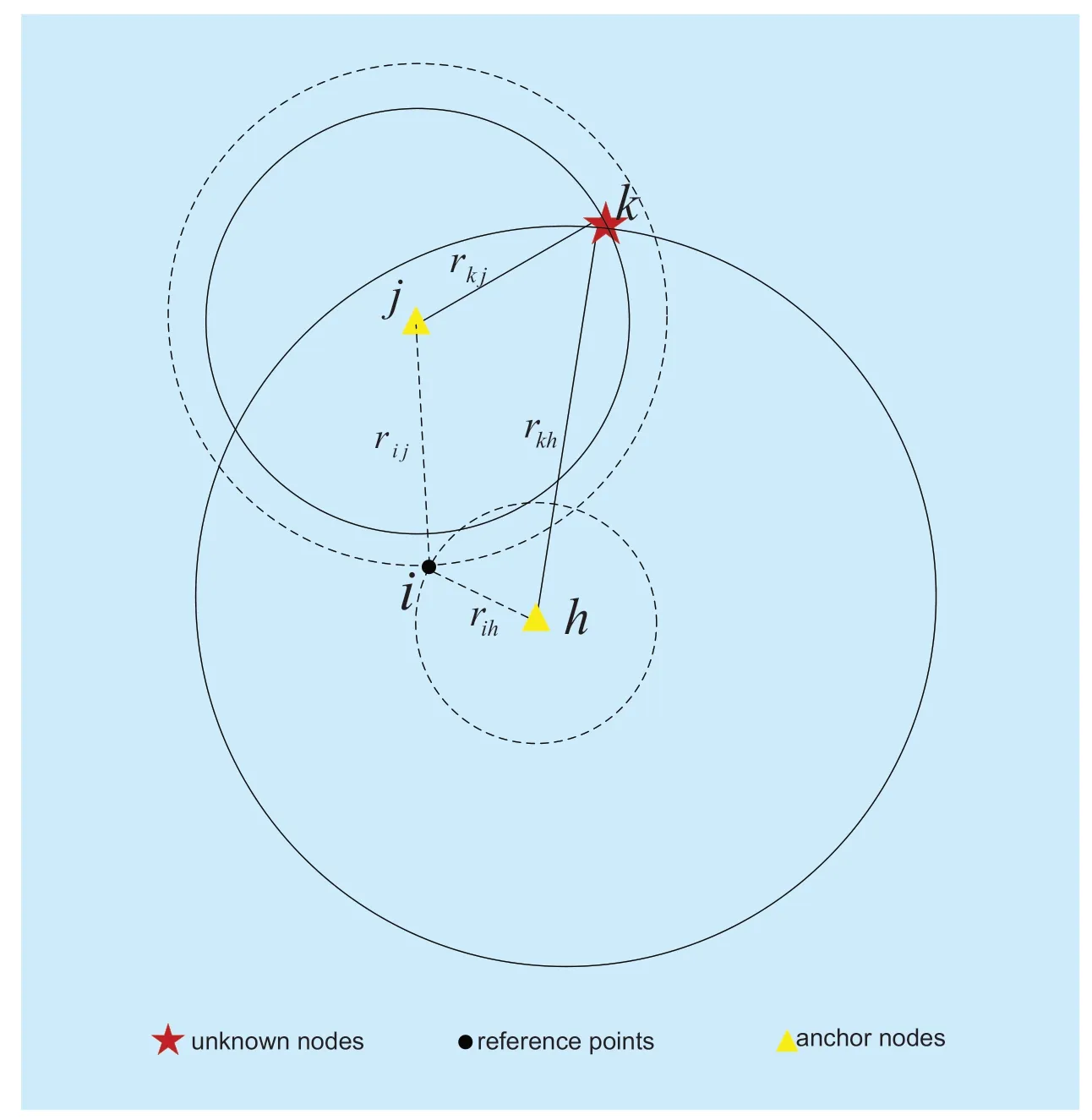
Fig 1.Distance relationship between sensor nodes and reference points.
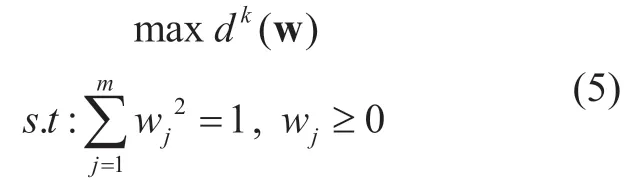
The foregoing analysis supplies an idea of maximum deviation to give the rational weight coefficient,and the optimization model is constructed:
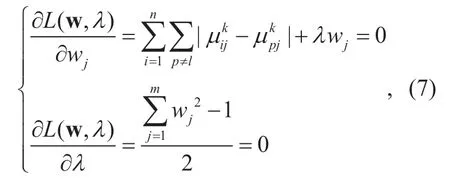
To solve the model,a Lagrange function is constructed:

whereλis the Lagrange multiplier factor.
Taking a derivative with respect to w andλ,then making them zero,so we can get the following equations:
The optimal solution ofwjcan be expressed asw*j:

Get normalized:
Multi-attribute decision matrix after knowledge fusion is:

2.3 Knowledge expansion
The result of decision comes from the application of the acquired experience,which is the data expansion based on the integrated knowledge.To some extent,attributevikjcan reflect the similarity of distance between anchor nodejand unknown nodekand distance between anchor nodejand reference pointi.Therefore,the matching degree ,which is the similarity between location of unknown nodekand reference pointican be estimated taking all anchor nodes factors into accounts.Then evaluating the location of unknown nodekbased on the coordinates of reference points and their matching degrees.
Assuming that distance between unknown nodekand anchor nodejisdkj,and distance between reference pointiand anchor nodejisAmong all these virtual reference points,the bigger the attributesvikjis,the more similar thedijis todkj,thus the closer the reference pointiis to the unknown nodek.
The positive ideal solutionVk+that is closest to the membership degree of the unknown nodekand the negative ideal solutionVk-that is furthest away.
in which,
With all anchor nodes concerned,Euclidean distances can be calculated to characterize distance between reference pointiand unknown nodek,that is
Virtual reference pointiwith biggerdik-and smallerdik+is considered to be closer to unknown nodek,then define matching degreeto show the similarity in location between reference pointiand unknown nodek,

The received RSS is influenced by the uncertain factors in the changing environment,and then influence the decision-making process,hence choosing the coordinates of the reference point with the best matching degree as the estimated position of unknown node can result in an inaccurate localization and does not apply to environment with the large fl uctuation of the electromagnetic interference.To enhance the robustness of the algorithm in difference environments,reorder the reference points according to the matching degree,and use coordinates of the fi rst K virtual reference points to calculate location of the unknown node.
III.SIMULATION ANALYSIS
Wise healthcare aims to provide objects with autonomous,effective and full coverage security,and the complete healthcare space can be divided into four basic areas according to the activities of the nursing targets: underground parking lot,indoor office areas,roads,open active region.For closed medical care space,signal propagation is mainly concentrated on the interior,the channel model is greatly affected by small-scale fading and shadowing effects,and differs from region to region.Therefore,localization should ensure the fl exibility in different areas among the whole medical care space and have high positioning accuracy.The Logarithmic distance model is introduced:

In the formula,PL(d) denotes the path loss when distance between transmitting and receiving devices isd,whilePL(d0) denotes the reference path loss at close ranged0,λis the path loss index which indicates the increasing rate of path loss with distance andXδis a normal random variable with standard deviation ofδwhich represents the ambient noise.
The environment parameter,such as the path loss index λ and noise factor δ are different from region to region,and they are obtained by actual measurement and analysis according to paper [15-18] and are set as shown in Table I:
The localization area of the simulation is shown in fi gure 2.Assuming that four regions are 120 120mm× square areas,and the reference points are uniformly distributed virtual grid points,then sensors are randomly thrown in the positioning areas,and sensors with known location are taken as anchor nodes.
Distance between the actual coordinate and the estimated coordinate of unknown nodekis the positioning error of unknown nodek:

Then the ratio of the average position error oflunknown nodes and the maximum communication radius of anchor nodes is defi ned as the relative localization error (RLE):
whereMis the maximum communication radius of anchor nodes.
The reference points are regularly deployed in the WSN,and changing the interval be-tween them may affect positioning accuracy.The proposed algorithm is applied to the above four regions to detect the impact of different reference points interval on the relative positioning error.
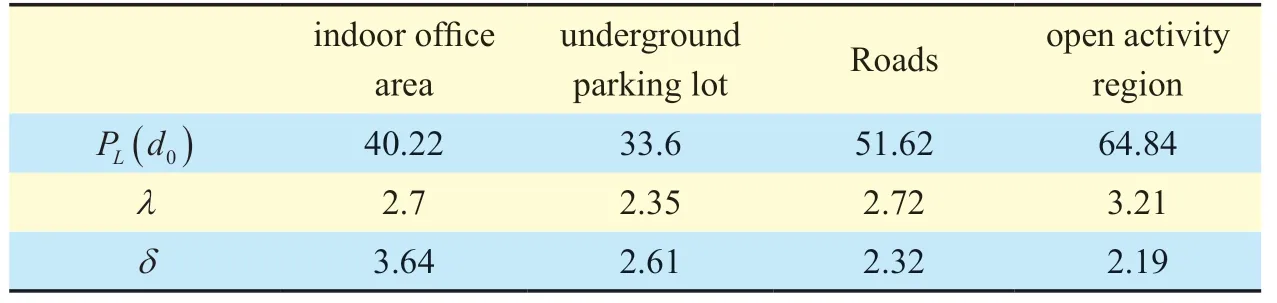
Table I.The path loss parameters in different regions of wise healthcare space.
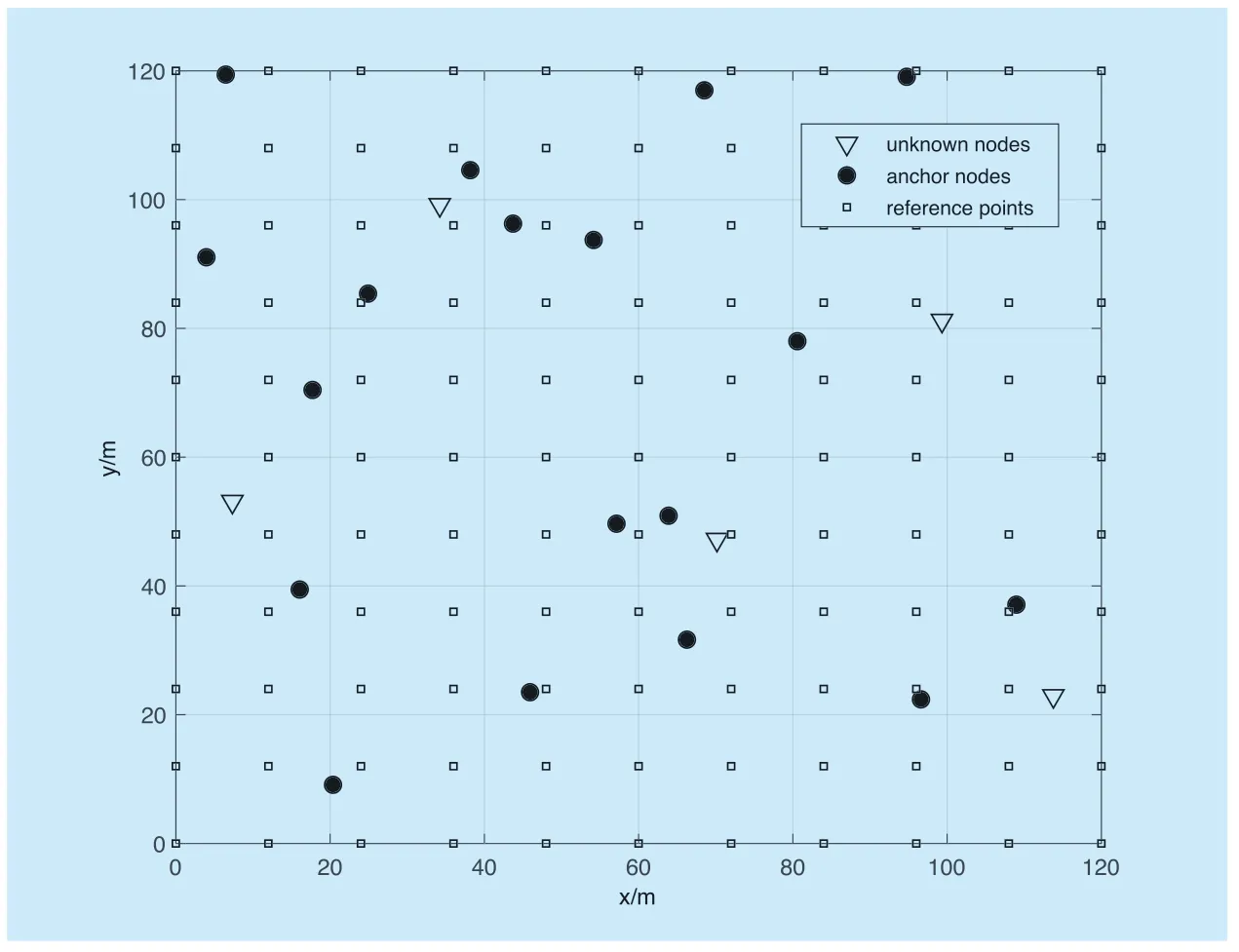
Fig.2.The localization area diagram.
Fig.3 shows the relationship between RLE of unknown nodes and the interval between reference points in different regions of the medical space.Theoretically,increasing interval of reference points makes the number of reference around unknown nodes decreases,thus the selected K reference points are getting further to the unknown nodes and have lower matching degrees,and the localization accuracy is reduced.It can be clearly seen that RLE of the proposed algorithm in different regions increases with the increase of the interval between reference points when the interval is among 5~20m,which means the decrease of the positioning accuracy.However,difference occurs in the electromagnetic environment and the interference of the noise make random disturbance to the energy loss of the wireless signal,hence when interval is less than 5m,adjusting the interval between reference points does not have much effect on RLE.When setting the interval value,it should be known that a small interval means much more reference points will be took into calculation.Considering accuracy and the computational complexity in practical,take 10m as the interval between reference points to further explore the effect of other factors on RLE is acceptable.
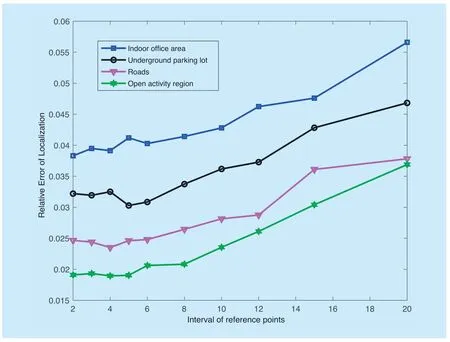
Fig.3.Comparison of RLE between different regions.
Furthermore,the interval between reference points is not the only influence factor of positioning error,anchor nodes proportion and noise standard deviation also affect positioning accuracy.
3.1 Anchor nodes proportion
The number of anchor nodes is the number of attributes in decision-making positioning.Adjusting the proportion of anchor nodes in all sensors,that is,the anchor nodes proportion can affect the localization performance.And improving the ratio of anchor nodes will lead to an increase of deployment and a decrease of energy effi ciency.Therefore,anchor nodes proportion is taken as a variable to simulate localization process and find a proper value which meets the requirements of positioning accuracy while saves energy consumption.
While perform the simulation,the RLE of GRNN base localization[9],FFNN based localization[10],ELM based localization[11] are experimenting at the same time,where the size of the hidden layer of the FFNN is 10,and the neural number of hidden layer of the ELM is 40000.A general regression neural network are constructed by four layers,which are input layer,pattern layer,summation layer and output layer,and it doesn't need the training process.However,the smooth factor need to be optimized,thus the computational complexity depends on the iterative optimization process of the smoothing factor.The computation complexity of training a feed-forward neural network isO(n* (n1*n2+n2*n3)),wherenis the number of reference points,n1,n2,n3represents the neural number of the input layer,the hidden layer and the output layer respectively.The extreme learning machine based localization simplify the network construction and removed the weight training iterative process,and the computational complexity isO(n*n2),.Meanwhile,the computational complexity of the proposed algorithm is as smaller asO(n).
As it can be seen from fi g 4,RLE of different localization algorithms in each wise healthcare space change with anchor nodes proportions.Taken together,with the transition from underground parking lot and indoor office areas to the relatively less crowded areas like roads and open activity region,the decrease of the congestion leads to the decrease of electromagnetic interference and small scale fading in the surroundings,thus RLE of various algorithms are reduced.And the proposed algorithm obtains the smallest localization error compared to ELM,GRNN and FFNN,and the RLE fl uctuation in different regions is smaller under the same anchor nodes proportion.
For example,in indoor office area with the worst noise environment,positioning performance of each technique is also the worst (fi g.4.a).Among these localization algorithms,FFNN has the largest RLM.When the anchor nodes proportion is 0.1,its RLE almost reaches 0.3,and RLE of ELM is slightly smaller than it,which is also close to 0.26.Increasing the proportion of anchor nodes leads to a rapid and continuous decrease of RLM of ELM,which can be explained by the increase of input data in the training phase,but it also brings a growth of calculation amounts.While RLE of FFNN starts to fl uctuate after a period of slow falling.This is because the feedback control of FFNN is based on the error closedloop,and excessive errors may occur when the input data is quite a lot.And the proposed decision-making based localization algorithm always gets the best error performance.Even when anchor nodes proportion is as small as 0.1,RLE of it is also lower than 0.15,which is the RLE of GRNN.As it shows,RLE decrease gradually with the improvement of anchor nodes proportion,and when proportion reaches at 0.45,the slope of descent curves is rather small.It illustrates that when there is not plenty of information,increasing anchor nodes proportion gives more information about the location relationship between reference points and unknown points from more attribute perspectives,thus improving the positioning accuracy.But after the information is suffi cient,the increase in input data does not result in a gain of performance,and uncertain factors in the environment play a leading role in localization RLE.

Fig.4.RLE of different algorithms under different anchor nodes proportion.
From the above analysis,we can find out that the performance of the proposed algorithm is best among 4 algorithms in terms of positioning accuracy,and GRNN is slightly inferior to it,while ELM and FFNN perform the worst.
The comparisons of the above algorithms performance in different regions are roughly the same,except that RLEs decrease as the localization condition improves (fig.4.(a,b,c,d)).When the anchor nodes proportion is also 0.45,RLEs of the proposed positioning algorithm in the underground parking lot,roads and open activity region are about 0.04,0.03 and 0.025,respectively.Meanwhile,the increase of anchor nodes does not make much difference on error reduce after the proportion exceeds 0.45.In summary,the decision-making based algorithm proposed in the paper has the highest localization accuracy in WSN compared to other three algorithms.While the cost of deployment,maintenance,and measuring during localization process will go up with the rise of anchor nodes proportion.To further explore the effect of noise on localization performance,this paper set the value to be 0.45,and simulation shows that the RLE is limited within 0.04,which meets the requirement of most localization applications.
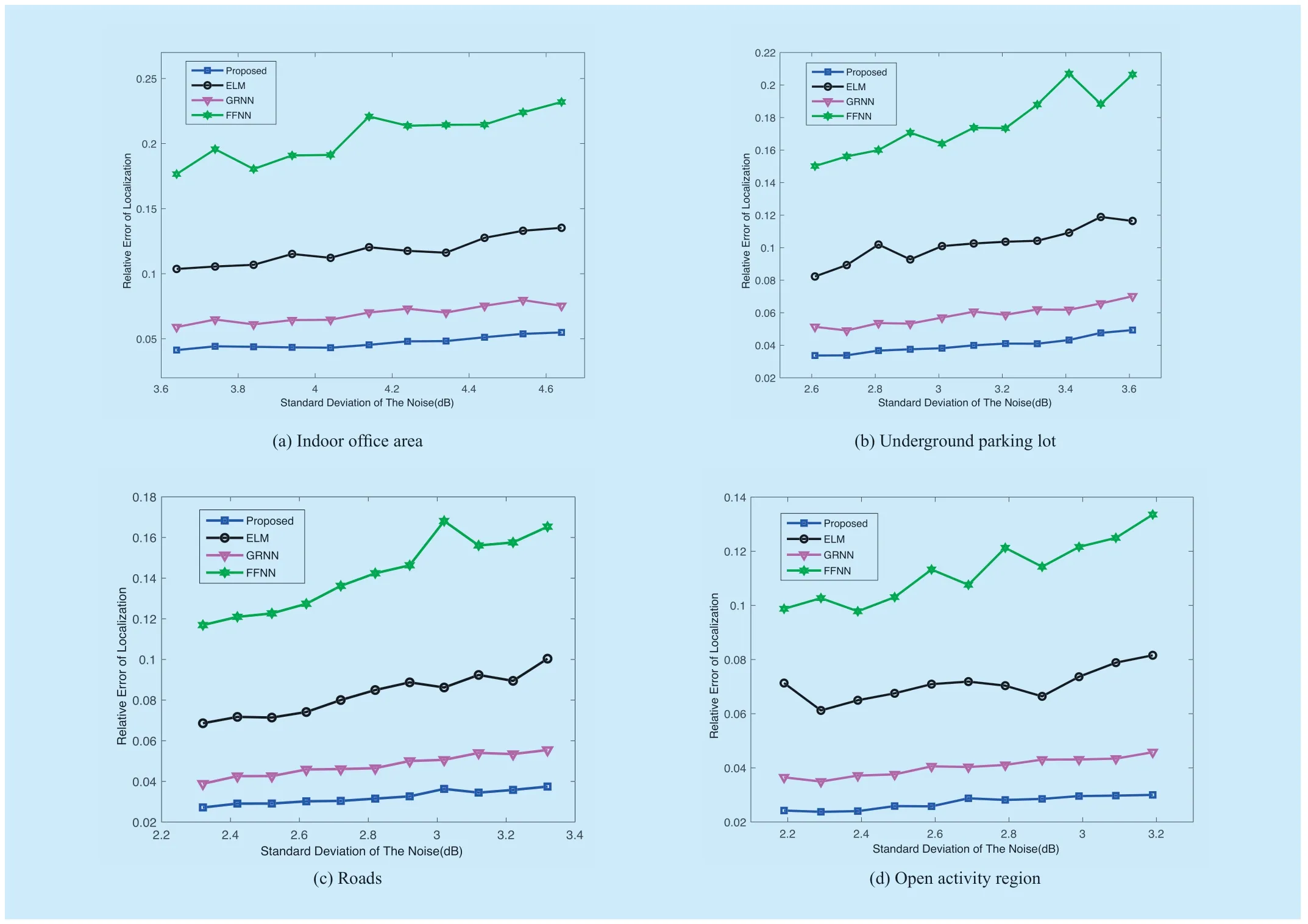
Fig.5.Effect of Noise on the RLE of Localization Algorithms.
3.2 Noise standard deviation
In practical applications,population density and geographical location of the surrounding buildings can affect the noise level in wise healthcare space,meanwhile RLEs of algorithms change as the noise standard deviation changes.To verify whether each localization algorithm can adapt well to different regions of the whole wise healthcare space where nursing objects are located and be robust to changes of noise interference,the standard deviation of noise is gradually increased during the simulation and RLEs are measured in different areas.
With the increase of noise power,it is obvious that RLE of localization algorithms increase (fig.5).The positioning error of FFNN and ELM fluctuate greatly and showed a fast upward trend,while RLE of GRNN and the proposed algorithm grow steadily and slightly.The fluctuation range of RLE in indoor office area,underground parking lot,roads and open activity region are 0.0413~0.0549,0.0337~0.0494,0.0272~0.0375,0.0242~0.0300.The enhancement of noise interference brings much more uncertainty and instability in path loss and received radio signal strength.However,compared to other positioning methods which are based on complex imitation and transformation of information of all the reference points,the proposed algorithm selects reference points close to unknown nodes based on RSSs,thus the impact of ambient noise is reduced.The positioning accuracy of fuzzy decision based algorithm is better than the existing several typical algorithms,and it has adaptability to the interference and noise changes in the changing environment.
IV.CONCLUSION
In order to reduce the labor cost of medical care and enhance the operational efficiency in wise healthcare field,WSN is taken as the essential supporting sensing network of the smart medical care system to realize the physiological parameters measurement and precise positioning of the nursing targets.Real-time monitoring and emergency alarm services are provided based on location information.This paper proposed a fuzzy decision based localization algorithm in WSN.The RSS database of reference points and unknown nodes is established,and then the membership degrees which represent distance relationship between them are quantified,analyzed and stored through the fusion of the database.Finally,locations of unknown nodes are estimated through the process of multiple attribute decision making.The simulation result shows that the positioning error of the proposed algorithm is kept at a rather low level in different wise healthcare regions with different path loss and noise interference,hence the proposed localization algorithm has strong environmental adaptability and high reliability.
ACKNOWLEDGEMENT
This work is supported by the National Natural Science Foundation of China (Grant No.51677065)

- China Communications的其它文章
- A Bandwidth-Link Resources Cooperative Allocation Strategy of Data Communication in Intelligent Transportation Systems
- UP-TreeRec: Building Dynamic User Profiles Tree for News Recommendation
- Bistable Stochastic Resonance Enhanced 4-ary PAM Signal Detection under Low SNR
- Tensor Completion for Recovering Multichannel Audio Signal with Missing Data
- A PCA-Based Internet Delay Space Dividing Algorithm
- An Effective and Scalable VM Migration Strategy to Mitigate Cross-VM Side-Channel Attacks in Cloud