
民用飞机失速尾旋(螺旋)事故
2019-04-18 11:56黄灵恩
民用飞机设计与研究 2019年1期
颜 巍 黄灵恩 /
(上海飞机设计研究院,上海 201210)
0 前言
失速、偏离和尾旋在飞机空气动力学和飞行力学中是一个需要突出研究的方向,其中飞机尾旋是飞机最复杂的飞行状态,也是飞机飞行的极限状态。在人类航空事业发展的初期,由于对飞机失速、偏离和尾旋的认识不足,导致了大量的飞行事故。随着航空科技的进步,工程师们研究并发展了许多防止尾旋的措施,但到目前为止还不能研制出在任何情况下都不进入尾旋的飞机。这主要是由于尾旋的多样性和不稳定性,不同的飞机尾旋模态可能完全不同,即使同一架飞机在不同期试验中,所获得的尾旋模态也可能大相径庭。此外飞机在失速、偏离和尾旋时的姿态特点、操纵性、安定性、操纵条件和所需的操纵方法,与正常飞行状态时根本不同。所以对飞机失速尾旋进行相关的研究是非常必要的。除了通常的利用计算机数值模拟、尾旋风洞试验等手段来研究飞机的尾旋外,对历史上的飞机失速尾旋事故进行归纳和总结也是防止飞机尾旋所必不可少的工作之一。本文即对历史上民用飞机所发生的尾旋事故进行详细的回顾[1] [2] [3] [4] [5]。
1 民用飞机尾旋事故
1.1 维克745D飞机尾旋事件
1958年4月6日,星期日,在暴风雪中,一架美国首都航空公司维克745D子爵型飞机从美国菲林特主教机场飞往密歇根州的自由地城市机场。快要接近目的地时,气象条件非常差,飞机前方能见度受到极大的限制,空气的温度和湿度使得飞机表面极易结冰,着陆时飞行员尝试用一个较大坡度的转弯来使得飞机对准跑道,结果在此一过程中飞机失速,并进入尾旋,飞行员无法恢复正常操纵,最终触地坠毁。事故调查结果显示,导致飞机尾旋坠毁的直接原因是,平尾和升降舵结冰区域扩大且没有被发现,致使飞机纵向稳定性变差甚至丧失,加上飞行速度和着陆构型的原因共同导致了飞机失去控制,此外,飞机失速告警系统没有起到相应的作用。
1.2 三叉戟客机失速试飞尾旋事件
1962年,试飞员Peter Bugge和Ron Clear为了测试三叉戟客机的失速尾旋特性,通过逐渐增加迎角来降低空速,在越过临界迎角后,三叉戟飞机开始保持爬升姿势并快速下降,进入深失速状态,少顷它开始尾旋,最后进入平尾旋状态,坠机看上去不可避免,此时,处于失速状态的一侧机翼下坠,飞行员通过偏转方向舵使得另一侧机翼下坠,飞机不停的左右摇晃直到机头缓慢低头,飞机缓慢的恢复到正常飞行,使得飞行员侥幸躲过一劫。此次事件使得民航客机开始增配了失速自动警报系统,又称驾驶杆抖振器(stick shaker):当客机失速时,驾驶杆抖振器将会被激活,抖动驾驶杆以引起机师的注意。除此之外,客机还增配了失速挽救系统,通称自动推杆器(stick pusher):当客机失速时,如果飞行员不予理睬驾驶杆抖振器的警报,自动推杆器会调整俯仰角,降低飞行迎角。
1.3 三叉戟HS-121飞机试飞尾旋坠毁事件
1966年6月3日,星期五,按照计划HS-121 G-ARPY型三叉戟飞机进行适航取证飞行试验。下午16∶52,飞机从英国哈特菲尔德机场起飞,飞机携带了大量的用于记录飞机飞行数据的仪器和其它设备。下午18∶30,在完成了大多数飞行试验后,飞机开始进行过失速(post-stall)飞行试验,飞行中操纵杆振动器被设定在102 knots,失速改出系统被设定在93 knots,前三次过失速飞行都顺利进行,并验证了失速告警系统和失速改出系统工作正常。接下来开始进行第四次过失速机动飞行,飞行高度为11 600 ft,全机着陆构型,后重心条件。为了探知飞机失速告警开始工作到飞机失速之间的真实的实际工作余量,飞行员断开失速告警系统,结果飞机进入超失速状态(super-stall,α≫αstall),机首上仰达到30°~40°,飞机开始向左偏转,右侧机翼开始下坠,随后飞机进入右平尾旋,最终触地坠毁。事故真相调查委员会的结论是:在飞机过失速飞行中,实施改出动作被大大的延迟,使得飞机进入超失速状态而无法改出。
1.4 Aeroflot航空7425号班机高空尾旋事件
1985年7月10日,前苏联Aeroflot航空7425号班机(Tu-154)在乌兹别克斯坦上空飞行,巡航高度11 600 m,飞行速度400 km/h(250 mi/h),接近此一高度的失速速度。飞机低速飞行引起的振动使得机组误认为发动机喘振,于是降低发动机功率到慢车状态,使得飞行速度进一步下降到290 km/h(250 mi/h),飞机失速后进入平尾旋,坠毁在乌兹别克斯坦境内乌赤库都克附近,191名乘客和9名机组人员全部遇难。经过调查,维修失误是该次空难的主要成因。在事发的前一天晚上,该客机的方向舵错误接驳至倾侧转向系统,而倾侧转向系统则接驳至电传操纵。而Tu-154飞机的航电系统插口设计不当,容易发生插头错插现象,且没有防插错的措施。此外,这次维修也不是在认可的设施中进行。这次事件是Tu-154飞机在前苏联境内唯一一次由于尾旋导致的重大航空事故。
1.5 西北航空B-2610号班机空中解体事件
1994年6月6日早08∶13,西北航空B-2610号班机(Tu-154)从西安咸阳国际机场起飞飞往广州,飞机离地24 s后机组人员即报告机体发生飘摆,且发出异响,但仍用额定功率保持400 km/h速度上升。起飞后3 min,飞机飞过西安城区,向东南方飞去,此后飞机分别于上午08∶16∶24和08∶16∶58报告坡度为20°和30°的飘摆,08∶17∶06时已保持不住飞机姿态。机组随即短时接通了自动驾驶仪,但无法稳住飞机,飞机向右做出不规则转弯。上午08∶22∶27,飞机发出失速警报,速度373 km/h,迎角20°,随后突然向左滚转,俯仰角由0°下俯到-65°,左倾斜角66.8°,进入尾旋状态,高度在12 s内由4 717 m下降至2 884 m,侧向过载接近2.5 g,飞机最后于08∶22∶42解体。经过事故调查发现,事故原因是由于飞机维修人员的人为差错致使飞机操纵性能异常,自动驾驶的舵机上的升降舵和方向舵的插头接反了,Tu-154的这两个插头都没有防错装置,飞机起飞后飞行人员接通自动驾驶装置,由于升降舵和方向舵的插头接反,舵面操作与指令不符而出现反操纵状态。
1.6 普科夫航空Tu-154M型飞机风暴尾旋事件
2006年8月22日,一架普科夫航空集团下属的俄制Tu-154M型客机计划从东乌克兰的安娜帕机场飞往圣彼得堡。莫斯科时间下午15∶37,飞机在11 500 m高空发出三个SOS求救信号,此后急速下降,在3 000 m左右发出最后一个求救信号,此后信号完全中断,于15∶39飞机从雷达屏幕上消失,坠毁在东乌克兰邓涅茨克附近,引起森林大火。调查人员根据黑匣子记录初步还原了飞机失事过程,当时飞机的飞行高度为35 100 ft(10 700 m),飞机的前方出现风暴,且飞机的机头正对台风眼,机长决定偏离航道20 km,并使飞机爬升越过风暴中心,不幸的是风暴的前锋非常的高,超过15 km,Tu-154M进入了风暴所造成的乱流区域,气流在10 s内将飞机从11 961 m抬高到12 794 m,在伴随着过度的俯仰振荡运动中飞机越过了的最大升限,飞机攻角超过了46°,而飞行速度降为零,飞机进入全失速状态,进而演变为平尾旋,最终飞机以极大的速度触地,机组人员和乘客全部丧生。
1.7 波音707客机起飞突风尾旋事件
1966年3月5日,一架英国海外航空公司波音707-436型客机按照原计划从美国旧金山国际机场飞往香港启德机场,中途经停夏威夷州首府檀香山机场和日本东京羽田机场。原预定到达羽田机场的时刻为3月4日下午16∶45,由于东京上空糟糕的气象条件和羽田机场未开地面飞机进场雷达,飞机不得不于18∶00转降福冈机场过夜,次日12∶43飞抵东京,稍作停留准备飞往香港,13∶42飞机机长接到起飞命令,并被允许飞跃富士山,13∶58飞机从东京羽田机场起飞,起飞后航向大约298°,飞行高度大约4 900 m,指示空速320 knots~370 knots。飞机突然冒出白烟,飞行高度陡降,飞机机头部位发生破裂,高度降至约2 000 m左右,部分机头脱落,飞机出现缓慢的右平尾旋,最后坠毁在一片森林里,并导致大火。对飞机尾旋事故的调查结果表明,飞机受到非正常的、剧烈的突风导致突风引起的载荷在某一时刻超过了设计极限,使得飞机机体受损,导致飞机进入平尾旋。
1.8 南方航空3943号班机撞山事件
1992年11月24日7时17分南方航空3943号班机(波音737-3Y0客机 ),从广州白云国际机场起飞前往桂林。飞机在7时52分失事,撞毁在天马山520 m(1 710 ft)处。经过官方调查认为:飞机右引擎自动节流阀故障以及机员没有及时发现并处理错误是造成空难的原因。报告指出,右引擎自动节流阀存在不能随动的问题,造成飞机在从下降转变为平飞姿态后,右引擎依然停留在慢车位,所输出的推力比左侧小。于是,为了让飞机得到平飞推力保持平飞,左引擎自动节流阀增加了推力,由于左右两侧推力相差很大,飞机开始逐渐向右偏转。检测到这个情况后,飞机的自动驾驶调整了副翼角度以恢复平飞,左副翼向上调整至5°而右副翼则向下调整至3.5°,即使作出了调整,飞机亦无法保持平飞并继续向右偏。机组在发现情况后处置失误,在右坡度已经达到46°时,错误地向右转向,让飞机继续右偏,飞机陷入倒飞螺旋下降状态,最终造成飞机撞山坠毁。
1.9 空客A310客机飞机人为操纵尾旋事件
1994年3月23日,一架俄罗斯国际航空公司的空客A310-304型客机从莫斯科机场飞往香港启德机场。当飞机接近诺乌库茨涅斯克航空汇报站时,飞行高度为10 100 m,机长的女儿进入驾驶舱,被允许坐在左后方的位置,机长向她示范了一些自动驾驶的操作,如使用HDG/S和NAV来改变航向,此时机长的儿子进入驾驶舱,坐在左前方的位置,机长同样对他的儿子演示了相同的动作,还演示了如何驾驶操纵杆,他缓慢的操纵驾驶杆,大约施加了8 kg~10 kg的力,并保持了数秒钟,后操纵驾驶盘回中,然后又对他的女儿演示了一遍,最后使用NAV来操纵飞机使飞机恢复正常飞行。当飞行自动驾驶仪尝试按照计划的航向保持水平飞行时,其指令信号与由于驾驶杆被放在中立位置所产生的信号相抵触,导致驾驶盘上的力增加到12 kg~13 kg,自动驾驶仪伺服系统与副翼联动装置的断开使得扭矩限制器被激活,但自动驾驶仪仍然在工作。飞机开始向右倾侧,角速度为2.5°/s,直到倾侧角达到45°。自动驾驶仪无法保持飞行高度,飞机开始全机抖振,驾驶员立刻呼叫副驾驶立刻回到他的座位上,由于副驾驶在后舱,使得他延误了2 s~3 s,倾斜角达到了90°,飞机以+4.8 g的加速度抬头,失速,最终进入尾旋,26 s后,飞机触地坠毁。
1.10 中华航空140号班机着陆进场尾旋事件
1994年4月26日,一架台湾中华航空公司的空客A300客机从台北飞往日本名古屋。当飞机到达名古屋上空准备着陆时,发生尾旋事故,着陆时尾部先行撞击地面起火。机上搭载271名乘客和机组人员,此次事故造成266人死亡。根据日本名古屋空难调查委员会的调查结果,空难原因为副驾驶在操纵飞机降落时,不小心误将飞机设定在重飞(go-around,意思是中止降落重新爬升),而因驾驶员一直不知飞机设定在重飞的自动操作状态下,驾驶员努力用手动操作,想要将机首压低,而因电脑在重飞爬升自动操作状态,电脑将机尾的水平安定面(horizontal stabilizer)设定到机首上升的状态“纠正”驾驶员“错”的压低机首的手动操作,结果在电脑与驾驶员操作机首角度的争斗中,飞机向上冲的攻角过大而失去平衡,最后失速尾旋坠毁。
1.11 土耳其伯根航空301号班机坠海事件
1996年2月6日,下午11∶42,土耳其伯根航空301号(波音757-225)班机从多米尼加共和国首都圣多明哥飞往联邦德国法兰克福。在起飞前检查阶段,机长发现他的空速表工作不良,但最终选择起飞,但副机长的空速表工作正常。当飞机爬升到4 700 ft(1 400 m)高度时,机长空速表指示飞行速度为350 kn(650 km/h),而自动驾驶仪显示的空速与机长空速表的空速不一致,机长拉高机头,并降低发动机功率来降低飞机的飞行速度,副机长的空速表指示飞行速度为200 kn(370 km/h),并持续下降。少顷,飞机飞行管理计算机发出了相互矛盾的紧急讯号,譬如方向舵比率、超速、速度太低及飞行高度太低等,使得驾驶员无法判别飞机的真实情况,不久自动驾驶仪达到了工作的极限并断开。在机组检查了电路断路器后,机组降低了飞机的推力,使得飞行速度降低,这个动作立刻触发了波音757飞机的失速抖杆器,向飞行员发出告警:飞机的飞行速度已经非常的低,但几秒钟后告警系统却告警飞机飞行速度太高。此时,副机长认为飞机已接近失速,但他没有直接告诉机长,可能是碍于年龄和经验的关系。此后机长尝试把推力开到最大来改出失速,但是飞机仍然保持机头上仰的姿势,这样阻碍了发动机获得足够的进气流来增加推力。不久,左发动机熄火,但右发动机仍然处于产生最大推力状态,巨大的偏航力矩将飞机带入螺旋飞行状态,片刻间,飞机反转倒扣陷入倒飞螺旋状态,8 min后飞机坠毁在大西洋里,13名机组成员和176名乘客全部丧生。
1.12 空客A300B4-605R型客机垂尾升降舵脱落尾旋事件
2001年11月12日上午09∶11,一架日本航空的波音747-400班机从美国纽约肯尼迪机场起飞飞往东京,之后准备起飞的是一架美国航空公司的空客A300B4-605R型客机,该机准备飞往中美洲的多米尼加共和国,机场塔台向飞行员告警,要飞行员注意之前波音747-400飞机的尾涡可能带来的潜在危险。09∶14,A300B4-605R型客机起飞,当飞机飞到距离海平面500 ft高度时,飞机进入左转爬升,改变航向220°。09∶15∶00,飞行员与塔台沟通,飞机正从1 300 ft向5 000 ft爬升,塔台回复飞机飞到13 000 ft后保持平飞。飞行记录仪所保留的数据显示,飞机失事开始于09∶15∶36,即A300B4-605R开始受到波音747-400飞机强大尾流的影响,第一驾驶员为了稳住飞机对方向舵施加了过度的操纵,使方向舵从左往右猛烈的偏转。在接下来的20 s内重复相同力度的操作动作,直到09∶15∶56,由于过于猛烈的操纵方向舵,使得飞机垂尾和方向舵的连接器(铰链等)断裂,垂尾和方向舵与机身完全脱离并下落,此时飞机机头开始上仰,8 s后飞机驾驶舱失速告警开始,在飞行员拼命想控制飞机的情况下飞机进入平尾旋,在剧烈的气动载荷下,飞机在触地前发动机脱落。飞行记录仪于09∶16∶00结束工作,驾驶舱声音记录仪于09∶16∶15结束工作。飞机触地后,撞毁了三间房屋,并引起街区大火,搭载的260名乘客和机组人员及三名地面人员全部丧生。
1.13 波音737-8EH飞机与巴西航空Legacy 600飞机空中相碰尾旋事件
2006年9月29日,一架编号为GLO1907的波音737-8EH型飞机搭载148名乘客从巴西西北部城市马瑙斯飞往滨海城市里约热内卢,当地时间16∶48与一架巴西航空的Legacy 600型公务飞机在Mato Grosso地区上空37 000 ft高度相撞。公务机左侧的小翼将波音737飞机的左侧近一半机翼瞬间割断,导致波音737飞机向下俯冲,并进入无法控制的快速螺旋状态,最后触地坠毁,148名旅客与机组人员全部丧生,Legacy 600型公务飞机部分受损,包括左侧小翼几乎全部脱落和左侧平尾受损,但仍然可以通过艰难的操纵使得飞机勉强保持平飞状态,最后紧急迫降于附近的一个空军基地。事故后,巴西空军、航空事故调查中心和美国交通部组成联合真相调查组对事故进行全面的调查,包括对飞机残骸的全面搜索检查,并扣留了公务机上的全部人员,没收了他们的护照。2007年5月公布的事故调查报告显示,两架飞机的防止空中相碰系统在两架飞机迫近时均没有及时的告警,同时声音记录显示,直到飞机相碰,飞行员也没有发现防止空中相碰系统不在工作状态,此外,由于空中管制的无线电系统出现故障,飞机也无法及时与地面接收站联系。
1.14 法国航空F447号班机坠海事件
格林尼治时间2009年5月30日,法国航空F447号班机(空中客车A330-203客机)原定由巴西里约热内卢加利昂国际机场飞往法国巴黎戴高乐国际机场。2009年6月1日凌晨01∶49,F447离开巴西雷达监控范围。两小时后,塞内加尔空中管制尝试联系这架班机,但联系不上机组,随后通知法国航空。到了应该到达法国空域时,空管员还是无法联系到飞机。随着飞机预计到达时间上午11∶10的过去,燃料应该已经耗尽,法航开始通知乘客家属,飞机可能在海上坠毁,巴西空军随即展开搜救行动。2009年6月6日,巴西空军宣布在离海岸约1 100 km处发现漂浮碎片,确认是A330客机的残骸,但没找到生还者。2011年5月2日,法国民航安全调查分析局宣布,飞机的2个黑匣子均已成功找回,到2011年5月16日,法航的客机黑匣子中的飞行数据已全部提取成功。根据对黑匣子中数据的分析,还原了当时的情况:2009年5月31日傍晚,法航447航班自里约热内卢起飞后,在空中飞行了3 h 40 min。强大的气流连续摇晃飞机长达30 min,大多数乘客都清醒着。突然,仪表显示外部温度上升了几摄氏度。可是,飞机正在海拔11 000 m高空飞行,温度绝不可能升高。错误的读数因飞机外的大气感应器上覆盖了厚厚一层冰晶所致。这些冰将机外的一些探测器隔离起来,这正是灾难的开始。在大西洋上空穿越雷雨云时,越来越多的冰扑向飞机,这个过程中,冰又毁坏了其他更重要的感应器:铅笔形状的速度监测器。驾驶舱监视器上,一个接一个的警示灯亮起来。自动驾驶仪、自动引擎控制系统和飞行电脑也接连关闭。随着速度的降低,飞机开始失速,并迅速下落,最终陷入螺旋状态,飞机自由落体式的砸向海面,从11 000 m飞行高度跌至海面仅用3 min多,飞机直到坠毁前最后一秒还完好无损,超过200 t重的金属、塑料、煤油和人体撞击海面。法医报告详细地描绘了撞击的巨大力量:肺被撕碎,骨头破碎,一些乘客被安全带切成了两截,多数打捞起来的残骸面积不超过1 m2。切割线呈明显角度,显示飞机并非垂直坠入海里,而是以接近水平的角度拍向海面。
1.15 全日空波音737-700客机倒飞尾旋事件
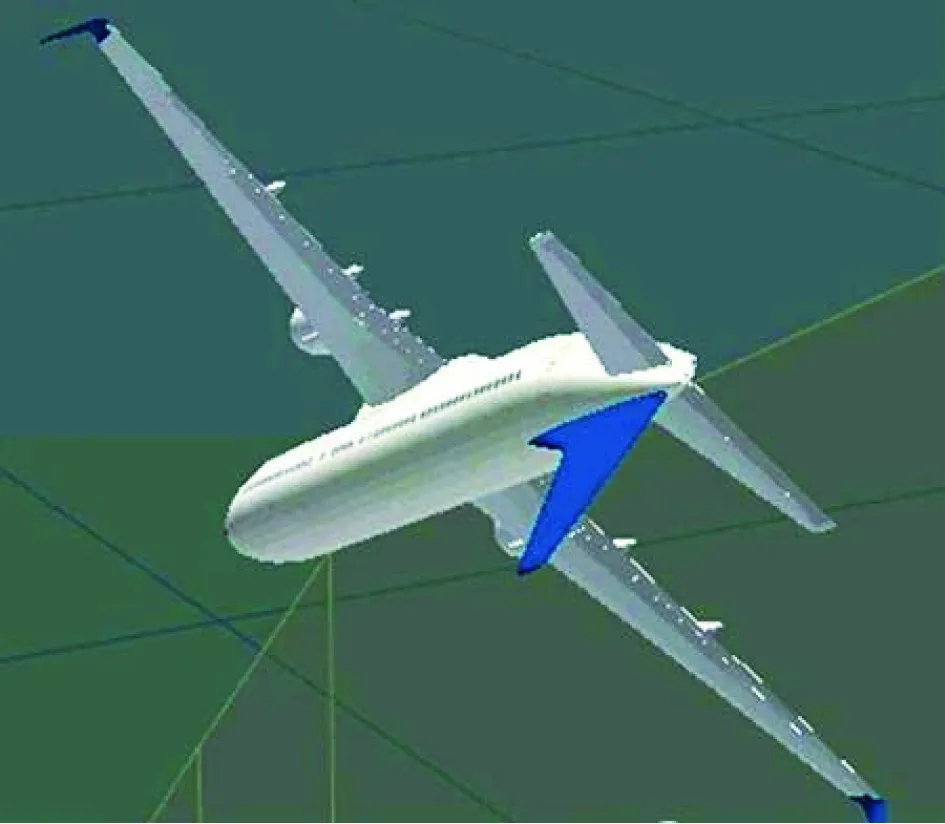
a) 倒飞状态模拟图
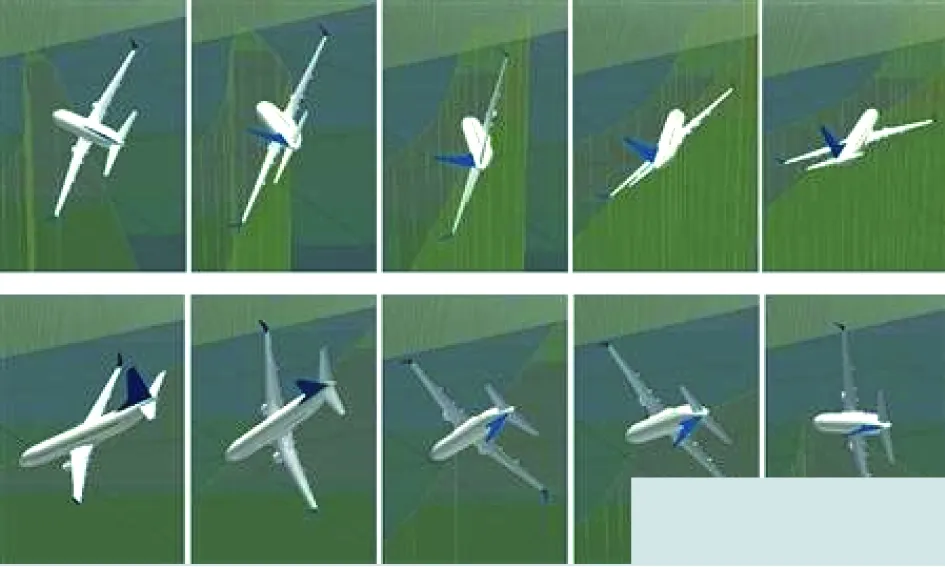
b) 进入倒飞尾旋的过程模拟图

c) 倒飞状态模拟图图1 全日空波音737-700客机倒飞尾旋事故模拟
2011年9月6日晚,全日空的一架波音737-700客机从冲绳那霸机场飞往东京羽田机场,机上共有112名乘客和5名乘务员。10∶50许,飞机在静冈县上空12 500 m高空飞行时,机长上厕所,副机长在邻座的驾驶席上。突然客机突然左倾,最大角度达到131.7°,进入倒飞状态,而后客机以头朝下35°的姿势,以螺旋状向斜下方急坠,在30 s内由12 500 m的飞行高度下坠1 800 m,过程中机体内外最大承受了约为地面2.68倍的重力作用,飞机倒飞状态如图1所示。机长慌张跑回驾驶席,立即将飞机恢复到正常状态,才没有导致严重事故的发生。所幸事故中100多名乘客由于全部系上安全带而没有受伤,仅有两名空姐因为头被撞而扭伤了脖子。事后日本运输安全委员会成立事故真相调查组,详细分析了飞行记录数据(DFDR),并对机组成员进行了详细的质询。调查结果是:副驾驶员暂时代替机长驾驶飞机时,误将尾翼的方向舵调整按钮当作舱门解锁按钮按下(737驾驶舱门锁开关,紧挨着方向舵配平电门,而且正好也是往左扭开锁),才引发了该事故。据悉,该副驾驶员此前曾驾驶一架波音737-500客机达4年之久,其舱门解锁按钮的位置、形状酷似事故飞机的方向舵调整按钮,因而才会按错键。副驾驶员过了约17 s发现操作失误后,虽然将操纵杆向右拉使机体开始复原,但中途有所松懈导致机体再次左倾并急速下降。为防止类似事故的再次发生,日本运输安全委员会要求全日空公司向所有飞机驾驶员普及单人持续驾驶飞机时应遵守的基本事项,并进行大型飞机异常姿态改出训练。
1.16 西锐(SR-22)未开反尾旋伞事件
2002年纽约,一架西锐空中宝马飞机发生失速尾旋事故,两名飞行员,同时也是飞机的购买者不幸身亡。他们6天前订购了飞机,并且都接受了该机型的失速尾旋训练。当时飞机在海拔5 000 m高空调整动作,飞机突然进入了右向的水平翻滚,然后飞机进入尾旋状态,最终机毁人亡。事故调查人员经过研究后认为当时唯一能改出尾旋的办法是打开减速伞系统,但是没有证据表明驾驶员曾经试图启动减速伞系统。
1.17 塞斯纳172飞机超载尾旋事件
2005年,一名飞行教练和3名乘客在纽约的科尼岛观光飞行中严重受伤。这架塞斯纳172型飞机从新泽西州的灵顿市起飞,在起飞时就已经进入超载状态,当飞达科尼岛时,目击者发现它沿着海岸线做低空飞行。同时雷达也注意到了这架飞机,最后的雷达报告显示飞机以60 kn的速度飞行,而高度只有300 ft。以这个高度和速度,飞机最后进入失速尾旋,然后一头栽到海滩上。
1.18 赛斯纳162试飞尾旋事故
2008 年9月18日,赛斯纳162飞机在试飞时发生坠毁事故。当时,飞机进行的试飞科目是从3 000 m高度开始进行一系列交叉控制带动力失速飞行(cross-controlled,power-on stall),但飞机进入平尾旋无法改出,在1 500 m高度失去控制,飞行员跳伞逃生。飞机上装有Ballistic Recovery Systems公司的反尾旋伞,但在发生事故时没能起动。事后塞斯纳公司声明,所进行的失速/尾旋试验是为了进一步提高飞机的安全性,超过了ASTM对LSA飞机的要求。在此次事故之后,塞斯纳公司对飞机的垂尾尾翼进行设计更改,主要是加大面积,略微减小后掠角。塞斯纳公司称,风洞试验表明,换装新垂尾后飞机不再存在不可恢复的尾旋特性。采用新垂尾设计的生产验证原型机(机号N162CE)于2008年12月15日首飞。
2009年3月19日,赛斯纳162飞机在进行带动力交叉控制(cross-controlled)尾旋试验时,再次发生坠毁事故。在发生尾旋时,飞行员起动飞机上的反尾旋减速伞,成功改出尾旋,但由于抛放机构发生故障,反尾旋伞无法抛放,由于飞行高度低,飞行员不能跳伞逃生,幸运的是飞机在硬着陆时只是损坏了主起落架(吸收了撞击能量),飞行员没有受伤。在下飞机之后,飞行员试图拆掉反尾旋伞,但没有成功。反尾旋伞在大风的吹动下,拖动飞机滑出约1 000 m,最终撞到一处栅栏上倾覆,飞机遭到严重损坏。
2 结论
综合来看,飞机发生失速尾旋(螺旋)的主要是人为的因素(如操作失误,判断失误,维修失误等),此外气象条件恶劣(如突风)、飞机系统故障(如发动机停车,飞机部件结冰等)也是飞机发生失速尾旋事故的重要因素。对于飞机设计师而言,为了保障乘客和机组人员的生命安全,除了研究和发展使飞机具有良好的抗尾旋性能外,也要对已经发生的飞机尾旋事故的原因进行总结。
猜你喜欢
环球时报(2022-03-28)2022-03-28
环球时报(2022-02-24)2022-02-24
控制与信息技术(2021年2期)2021-07-23
小天使·一年级语数英综合(2020年5期)2020-12-16
人民交通(2019年16期)2019-12-20
小学生作文(低年级适用)(2019年5期)2019-07-26
伙伴(2018年7期)2018-05-14
读友·少年文学(清雅版)(2018年12期)2018-04-04
中国新闻周刊(2009年38期)2009-10-23
小朋友·快乐手工(2009年4期)2009-04-28
