基于遗传算法优化BP神经网络的海上DFIG定子绕组故障诊断
2019-04-15 11:03:46上海绿色环保能源有限公司张智伟陈云巧
太阳能 2019年2期
上海绿色环保能源有限公司■张智伟 陈云巧
上海电力学院电气工程学院■王栋悦*符扬
0 引言
由于海上双馈风力发电机(DFIG)运行环境恶劣、故障率高[1],风电场经年累月运行,数据庞大,从庞大的数据中可以提取出多个可用于故障诊断的数据信息[2-4]。由于特征量众多,且特征量与发电机故障之间存在非线性关系,仅依靠设置故障报警阈值的辨识方法已很难及时地对故障做出正确的判断,因此,迫切需要一种智能方案及时、有效地解决这一问题。
基于数据驱动的故障诊断方法包括统计分析法、信号处理法及人工智能法[5]。统计分析法主要是通过历史数据分析当前样本运行状态,能较好地利用变量之间的耦合性,此方法适合高维系统的故障检测与诊断。信号处理法主要是利用专家知识与系统运行参数进行分析,从而得到综合评价,是典型的信号分析处理过程,依赖于信号的提取。人工智能法主要是通过利用正常运行数据及故障数据来训练各种智能算法,进而诊断故障,当故障类型与故障表象之间不是简单地线性关系时,该方法较为适用[6]。
近年来,随着人工神经网络和模式识别的引入,海上DFIG故障诊断技术有了快速的发展,神经网络能逼近任意非线性函数,并拥有高度的自组织、自学习的能力,其逐渐成为智能诊断的一种有效方案[7]。
1 定子绕组短路诊断原理
定子绕组匝间短路故障特征量的提取会直接影响故障诊断的效果,是所有诊断定子绕组匝间短路方法中最重要的一环。当DFIG匝间短路时,由于短路破坏了原三相绕组的电气平衡,使得绕组内部定子电流不对称,导致定子、转子之间的气隙磁场中含有大量幅值较大的空间谐波分量[8]。
若DFIG某一绕组的一匝线圈中有电流i1,则其磁势可看做两个互相独立导体磁势的合成,且两个互相独立的导体中流过的电流幅值相同、方向互逆,则可得一匝线圈磁势的傅里叶级数展开式为:

式中,kyf为线圈节距因数,α为两个导体相隔的空间电角度;P为极对数;v为谐波次数;整距线圈中v=1/P,2/P,3/P,…,且v不为偶数;短距线圈中v=1/P,2/P,3/P,…。
在理想工况条件下,DFIG正常运行,假设定子三相绕组产生的磁势为一正向旋转(以顺时针为正向)的圆形磁势,根据法拉第电磁感应定律,其可在三相绕组中感应出正序电流。当DFIG某相定子绕组发生匝间短路时,则有一个与正常电流相同的短路电流叠加在短路线圈上,同时建立了一个因故障而产生的非正常磁场,将之与正常情况下的发电机磁场叠加,从而形成了故障状态下的电机磁场。
电机定子绕组发生匝间短路故障时,因绕组内部结构异常,定子绕组自身的平衡性遭到破坏,三相绕组于空间上不再对称,导致工作电流也随之不对称,因而由工作电流建立的磁势中包含了大量的谐波分量。若在发生匝间短路故障的短路线圈上叠加一个电流if=Icos(ωt),故障短路匝沿气隙方向分布的空间电角度为α=Pθ,根据式(1),其磁动势可以表示为:

式中,t为时间,I为短路电流幅值,ω为电源角频率;θ为以定子坐标为参照坐标的机械角度,θ=φ+(1-s)ωt/P;φ为以转子坐标为参考表示的机械角度;s为转差率。
因此,将F(θ,t)变换到转子坐标系中可得:

磁势F(φ,t)于转子侧产生的电流分量为:

式中,IRf为转子侧的电流幅值。
若定子绕组发生匝间短路故障时,由于发电机的定转子在空间中相互独立,所以发电机转子绕组对称性不受影响,则转子侧电流IR产生的磁动势在转子坐标系中可表示为:

式中,Fv,n为n次谐波磁势的幅值,n=6p+1,p=0,1,…。
以θ代替式(5)中的φ,则可以得到磁势FR(φ,t)在定子坐标系中的表达式为:

通过分析式(4)可得,磁势F(φ,t)于转子侧感应出频率为[1±v(1-s)]f1的电流分量,磁势FR(φ,t)于定子侧感应出频率为[1+(n±v)(1-s)]f1的电流分量。
因此,DFIG定子绕组发生匝间短路后,定子、转子侧电流都将感应出特定频次的谐波分量。其中,定子侧感应出sf1、(0.5+0.5s)f1、(1.5-0.5s)f1、(2-s)f1、(2.5-1.5s)f1、(3-2s)f1、(4-3s)f1等频次的谐波分量,转子侧感应出(0.5+0.5s)f1、(1.5-0.5s)f1、(2-s)f1、(2.5-1.5s)f1、(3-2s)f1等频次的谐波分量。
2 不同谐波分量故障样本的BP神经网络
2.1 适用于DFIG故障诊断的BP神经网络拓扑及算法
BP神经网络是众多应用广泛的神经网络中的一种,属于多层前馈神经网络,其信息前向传送,误差逆向传送。当数据信号进行前向传递时,输入的样本信息通过输入层进入隐含层(单层或多层),通过隐含层数据处理后,再进入输出层,对于任意神经单元,其只会影响与之连接的后一个神经元。如果输出信息达不到设定要求,那么就进入误差的逆向传送,根据修正误差修改各个神经元之间的权值和阈值,从而使BP神经网络预测输出不断接近设定预期输出。BP神经网络的拓扑结构如图1所示。
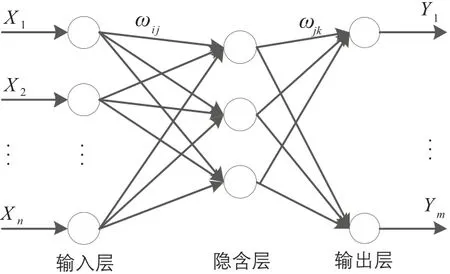
图1 BP神经网络拓扑结构图
由图1可知,X1,X2,…,Xn为BP神经网络的数据信息输入值,ωij与ωjk分别是BP神经网络的权值,Y1,Y2,…,Ym是BP神经网络的预测值。本神经网络中输入层节点有n个,输出层节点有m个,表示了从n个自变量X1,X2,…,Xn到m个因变量Y1,Y2,…,Ym的函数非线性映射关系。
BP神经网络用于故障诊断时首先应对神经网络进行一定的训练,将信息前向传送和误差逆向传送时神经网路的每层权值和阈值不停调节的过程称之为神经网络的训练过程,通过一定次数的训练,使神经网络初步具有联想记忆能力和预测输出能力,BP神经网络完成设定的训练次数之后,经检验输出符合预期,则其就可以投入到实际应用中。在对DFIG进行故障诊断时,只需经过信息前向传送的过程,并不需要逆向传送。具体的训练流程如图2所示。
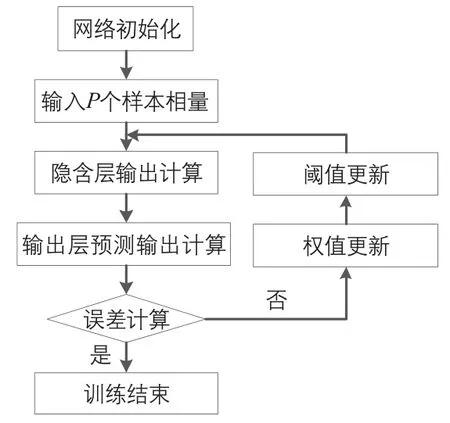
图2 BP神经网络训练流程图
由图2可知,BP神经网络训练的具体步骤为:
1)步骤1:网络初始化。根据诊断系统的信号相量维数(输入X,输出Y)进一步确定网络输入层节点数n、输出层节点数m,隐含层节点数l。对神经网络各层神经元之间的连接权值ωij、ωjk,隐含层阈值a,输出层阈值b进行初始化处理,并且给定神经网络学习速率和神经元激励函数。
2)步骤2:输入P个样本相量。
3)步骤3:计算隐含层输出Hj。

式中,j为隐含层节点数,j=1,2,…,l;f为隐含层激励函数;xi为输入值,aj为隐含层阈值。
4)步骤4:计算输出层预测输出Ok。

式中,k=1,2,…,m。
5)步骤5:计算网络误差ek。

式中,Yk为理想输出;k=1,2,…,m。
6)步骤6:判断误差是否满足故障诊断要求的条件,若满足,则程序结束;若不满足,则执行步骤7。
7)步骤7:权值更新。
权值ωij的更新式为:

式中,i=1,2,…,n;j=1,2,…,l;η为学习速率。
权值ωjk的更新式为:

式中,j=1,2,…,l;k=1,2,…,m。
8)步骤8:阈值更新。
阈值aj的更新式为:

式中,j=1,2,…,l。
阈值bk的更新式为:

式中,k=1,2,…,m。
9)步骤9:返回步骤3。
在整个学习的过程中,步骤7与步骤8至关重要,如何调节权值,使预测误差持续变小,是BP训练算法的核心问题。
2.2 样本获取及数据的归一化处理
由录波仪可以直接得到DFIG的定子、转子电流,再经过对数据的频谱分析之后可得到各频率含量谐波的幅值。但是原始数据一般情况下不允许直接作为输入量传入输入层。因为原始数据量纲、数量级不统一,直接输入原始数据往往会导致BP网络连接权值相差过大,进而导致性能不稳定,故原始数据信息在输入神经网络系统之前必须要经过数据预处理。
本文采用数据归一化作为数据预处理的方法。数据归一化处理是将所有输入的数据经处理转换到[0,1]范围,为的是消除数据间的量纲、数量级大小的差异,从而避免神经网络预测误差过大。输入数据归一化的具体方法为:

式中,x′k为归一化后的输入数据;xk为某维数据中的第k个数据;xmin为某维数据中的最小值;xmax为某维数据中的最大值。
通过式(14)可得到样本归一化之后的数据,如表1、表2所示。
正常运行样本的各参数如表1所示。定子匝间短路故障样本的各参数如表2所示。
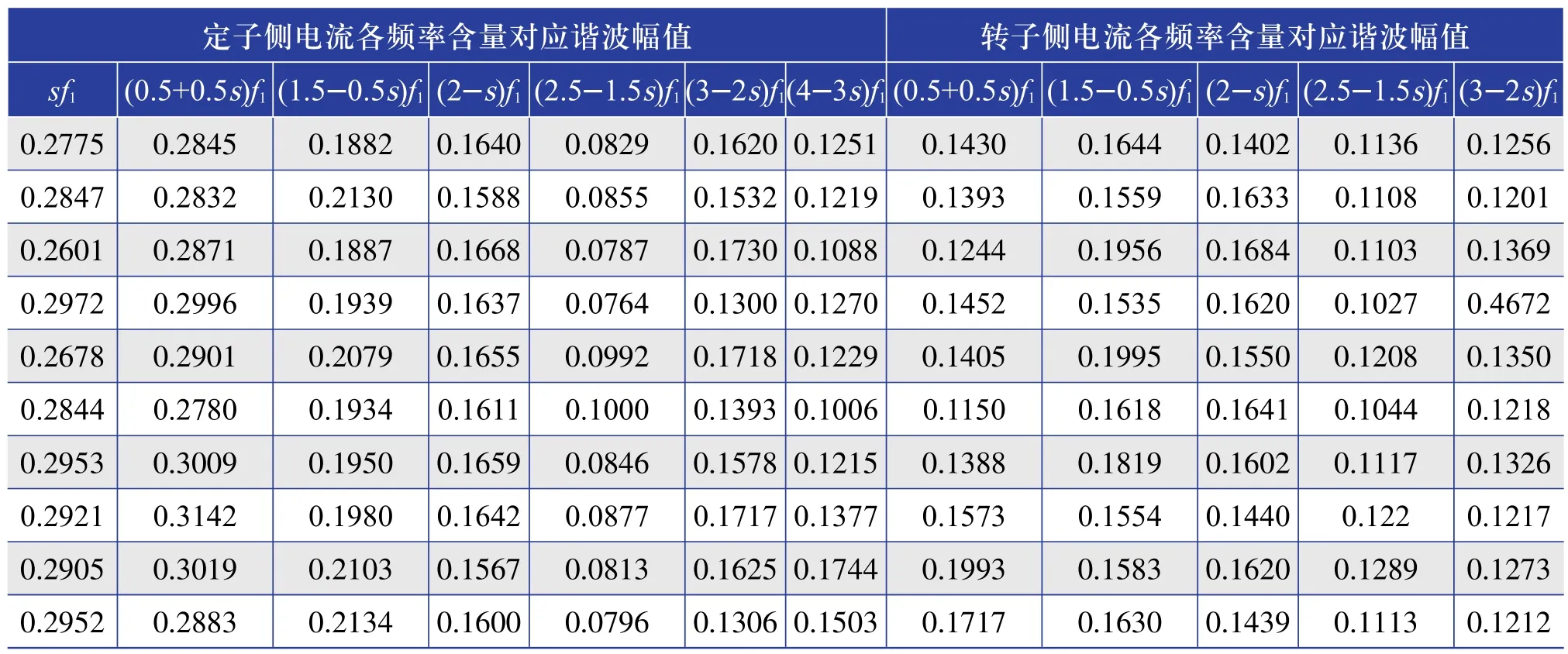
表1 正常运行时DFIG定子、转子侧电流各频率含量谐波幅值
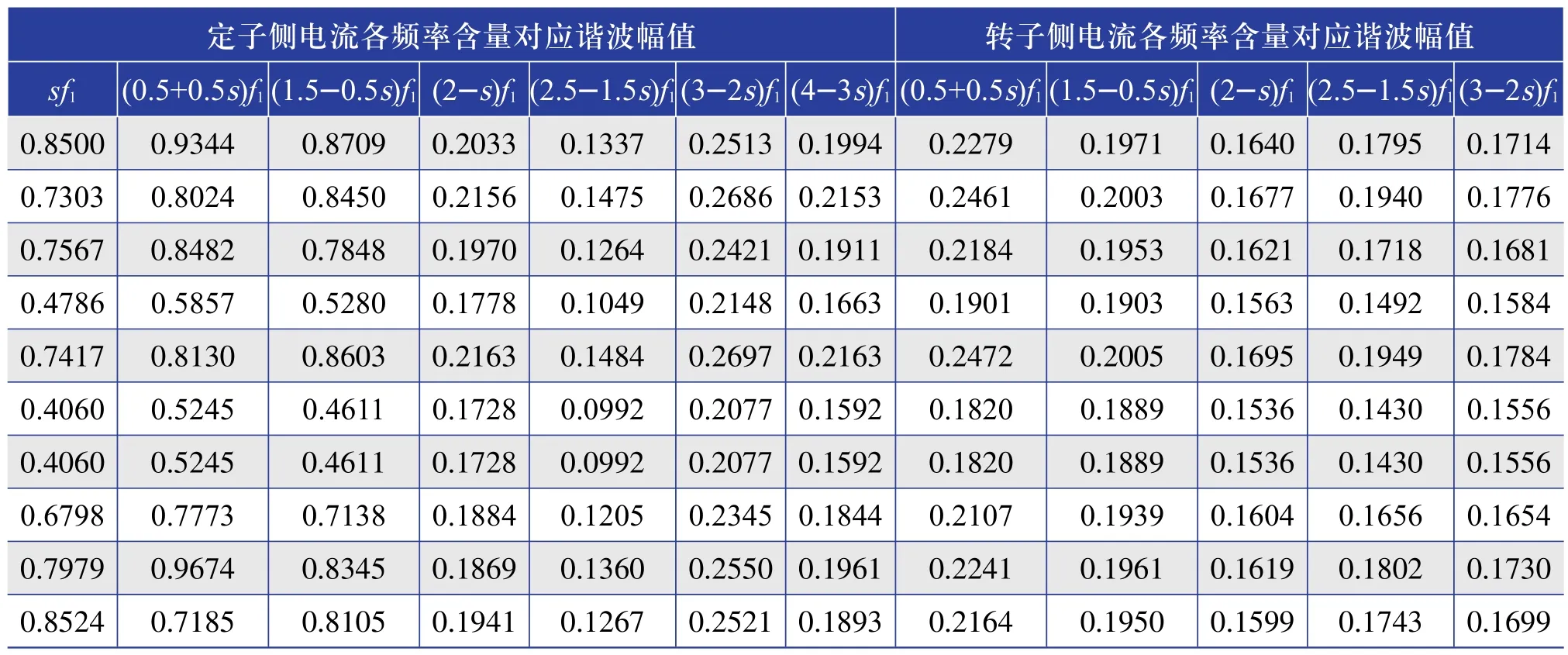
表2 定子匝间短路故障时DFIG定子、转子侧电流各频率含量谐波幅值
2.3 针对海上DFIG故障诊断的BP神经网络模型的建立
基于故障诊断的BP神经网络的建模过程包括建立BP神经网络、BP神经网络训练和使用BP神经网络进行分类3步,具体算法详细流程如图3所示。
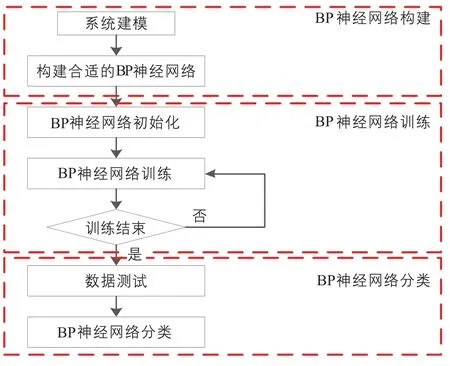
图3 算法流程
从工程中的应用来看,仅单层隐含层的BP神经网络就能解决任何实际问题,而且随着神经网络隐含层数目的提升,对其进行训练的时间将大幅变长,由此产生的局部最小误差值也会相应增大。因此,本文将以DFIG定子绕组匝间短路故障作为研究对象建立的BP网络隐层数目设置为1。BP神经网络的隐含层节点数的选取是建立BP神经网络的关键步骤,其数目会影响预测精度。隐含层节点数目太少会使训练次数激增,使神经网络的学习能力降低、精度变差;隐含层节点数过多,神经网络将会过拟合,导致训练时间的延长。根据经验,最优化隐含层节点数目可以用经验公式确定:

式中,m为输出层节点数;n为输入层节点数;a为隐含层阈值,其取值为1~10的整数。
在实际工程中,首先是根据经验公式确定隐含层节点数目的大概范围,然后通过不断凑试,选择使网络性能最佳的隐含层节点数目。由前文可知,以定子侧感应出的sf1、(0.5+0.5s)f1、(1.5-0.5s)f1、(2-s)f1、(2.5-1.5s)f1、(3-2s)f1、(4-3s)f1频次的谐波分量和转子侧感应出的(0.5+0.5s)f1、(1.5-0.5s)f1、(2-s)f1、(2.5-1.5s)f1、(3-2s)f1频次的谐波分量作为系统输入,数据共12维,输出为两类,即正常工况(0,1)、匝间短路工况(1,0),因此,n=12,m=2。根据式(4)~式(14),隐含层节点个数分别取5、6、7、8、9、10、11、12、13。本案例中隐含层节点数与网络训练误差对应关系如图4所示。
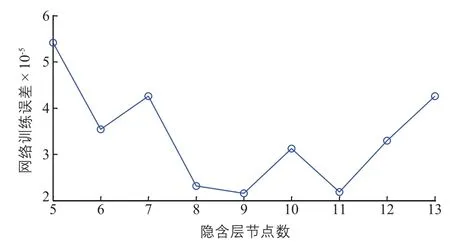
图4 隐含层节点数与网络训练误差对应关系
从图4中可以看出,本文中BP神经网络的训练误差随着隐含层节点数目的增多大体上呈现先减小后增长的趋势。
综上所述,通过故障诊断系统信号维数特性构造BP神经网络,其结构为12-9-2,即输入层设置12个节点,隐含层设置9个节点,输出层设置2个节点。
3 建立融合遗传算法的BP神经网络
从前文分析可知,BP神经网络虽然可以较为准确地诊断出定子绕组匝间短路故障,但是传统的BP算法却存在一些影响BP神经网络性能的因素。由于BP神经网络是通过误差逆向传送算法进行训练的,导致了训练速度缓慢,且有时算法会因逼近局部极小值点而造成误差,因此需要对算法进行改进,从而解决此实际问题。但是传统神经网络在建模过程中隐含层节点数目通常由经验公式得出,还需要反复的测试和训练。因此,本文针对以上3个缺陷,结合遗传算法优化BP神经网络。
遗传算法优化BP神经网络算法流程如图7所示。
由图5可知,本文优化之后的算法分为3个模块,分别为结构模块、优化模块和预测模块。其中,结构模块是根据部分故障特征量与需辨识故障类型的维数特性来确定BP神经网络结构,进而确定族群中个体的长度。优化模块优化了权值和阈值,族群中的所有个体均含有所有网络参数,每个个体经适应度函数计算适应度值,选择算子寻找最优个体。预测模块利用优化模块的结果对网络初始值和阈值赋值,网络经训练后预测函数输出。
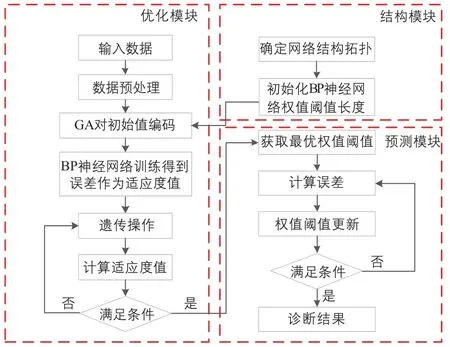
图5 遗传算法优化BP神经网络算法流程
优化后的BP神经网络训练误差如图6所示。
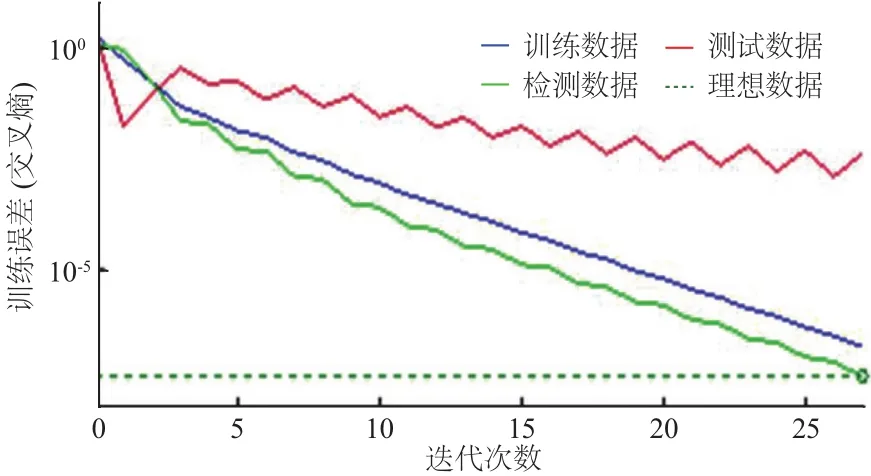
图6 优化后的BP神经网络训练误差
从图6中可以看出,迭代次数为27时达到最佳训练结果,误差为4.327×10-8。BP神经网络在经遗传算法优化之后的训练误差较未作优化前(10-5)降低了3个数量级,并可以降低网络训练次数进而节省训练时间。
从图7仿真结果可以看出分类的效果,绿色区域表示分类结果与测试数据的实际情况一致;红色区域表示两者结果不一致,红色区域内的百分数越小,说明误差越小。因此,本网络的正确率达到了100%,说明本神经网络能够精确的反映DFIG定子匝间短路故障。
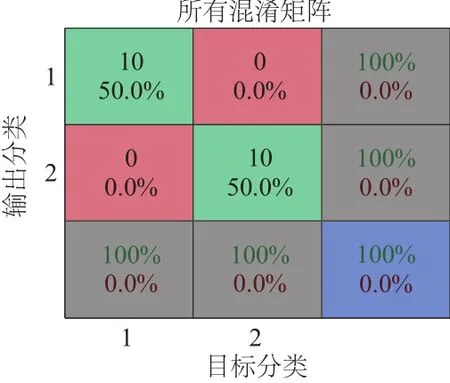
图7 仿真结果
4 总结
本文分析了大数据背景下海上DFIG故障诊断系统的研究现状,得出在当前形势下,从大量冗杂数据中提取分析出众多的故障特征很难用传统的设置报警阈值去辨识故障,需要引入人工智能领域的先进方法。通过对定子绕组短路诊断原理的分析,提取电流中某些特定频次的谐波分量。使用传统的BP神经网络虽然可以诊断出故障,但是存在一些问题,如训练速度缓慢、有时会逼近局部极小值点、隐含层节点数目选择困难等。为了克服这些因素的影响,本文将遗传算法融入传统的BP神经网络,经仿真和实验验证,优化后的BP神经网络训练速度快、训练误差小、诊断结果精确,完全可以胜任大数据背景下的海上DFIG定子绕组匝间短路故障诊断任务。此方法具有通用性,可推广应用至陆上风电场等其他DFIG中。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:08
大电机技术(2022年1期)2022-03-16 06:40:10
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
电机与控制应用(2015年10期)2015-03-01 03:50:16
电机与控制应用(2015年2期)2015-03-01 03:49:29