
运输机外伸硬式桁杆系统控制律设计方法研究
2019-04-10 06:40颜凯李思潭王磊
科技创新导报 2019年34期
颜凯 李思潭 王磊
摘 要:对运输机上改装的外伸硬式桁杆系统,提出了一种控制律设计思路。通过风洞试验与力学分析建立飞机-桁杆系统耦合模型;在此基础上,通过特征根比对研究桁杆系统对原机飞控系统的影响,并对耦合模型进行降阶处理,建立了短周期模态结合桁杆系统运动模态的低阶模型;最后结合任务剖面特点,通过内环阻尼器结合外环PI控制进行桁杆系统姿态保持控制律设计,并进行仿真分析。结果表明桁杆系统不影响原机飞控系统正常使用;采用短周期模态结合桁杆系统运动模态的控制模型精度高,满足控制律设计要求;采用内环阻尼增稳结合外环PI控制的桁杆姿态保持控制的设计方法可行,具有重要理论参考意义。
关键词:硬式桁杆系统 降阶处理 飞行控制 姿态保持
中图分类号:V249 文献标识码:A 文章编号:1674-098X(2019)12(a)-0008-05
Abstract: A kind of control law design method is proposed for the transport aircraft overhanging rigid truss rod system. The coupling model of aircraft and truss rod system is established by the wind tunnel test and mechanical analysis, based on which the influence of the truss rod system on the original flight control system is studied by eigenvalue ratio. And the simplified control model composed of the short-period mode and the motion mode of the truss rod system is established. Finally, the attitude control law design for the truss rod system is achieved by the inner damper combined with the outer PI control according to characteristics of the task profile and the simulation demonstration is conducted, which shows that the truss rod system have little influence on the original aircraft system, and the high accuracy of the control model which is established on the short-period mode combined with the motion mode of the truss rod system is satisfied for the control law design. Therefore, the attitude control law design method which is achieved by the inner damping augmentation with the outer PI control is feasible and has engineering application value.
Key Words:Overhanging rigid truss rod system; Model; Flight control; Attitude keeping control
運输机改装外伸硬式桁杆系统能够满足很多特殊要求,在科研试飞、军民用领域均具有很高的应用前景。科研试飞中通过在运输机上加装外伸硬式桁杆系统高空喷水,可以创造出满足要求的结冰试飞环境。军用方面,在空中加油领域,硬式桁杆系统相比软式加油具有无可比拟的优势[1-2]:硬式桁杆相比软管截面大,输油速度高,空中加油极大地降低了受油机飞行员操作负担,因此,硬式加油方式是空中加油技术的发展方向。
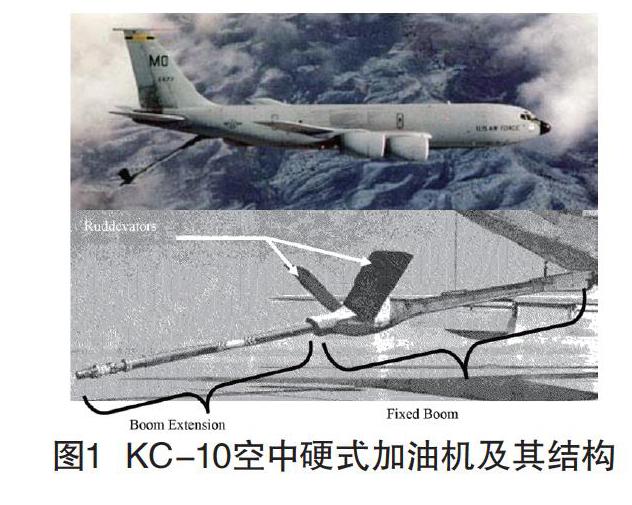
硬式桁杆系统能够满足很多特殊功能的需求,但硬式桁杆系统本身对飞行安全将产生不利影响,为保证飞行安全,需要在飞行时精准控制桁杆系统运动。目前国外只有美国成功应用硬式受油技术[2-4],我国在这方面的基础研究比较少,尚未形成真正的应用。图1为美国根据DC-10改造的KC-10空中加油机及其硬式桁杆结构,图2为我国研制的喷水试验机。
本文以某型飞机喷水系统为研究对象,研究运输机外伸硬式桁杆系统控制律设计方法。首先通过风洞试验数据与力学分析建立飞机-桁杆系统耦合模型;在此基础上研究桁杆系统对原机飞控系统的影响,并对桁杆系统控制模型进行降阶处理;最后根据桁杆系统控制模型,结合任务剖面特点,通过内环阻尼增稳控制结合外环PI控制开展桁杆系统姿态保持控制律设计。
1 桁杆系统动力学模型
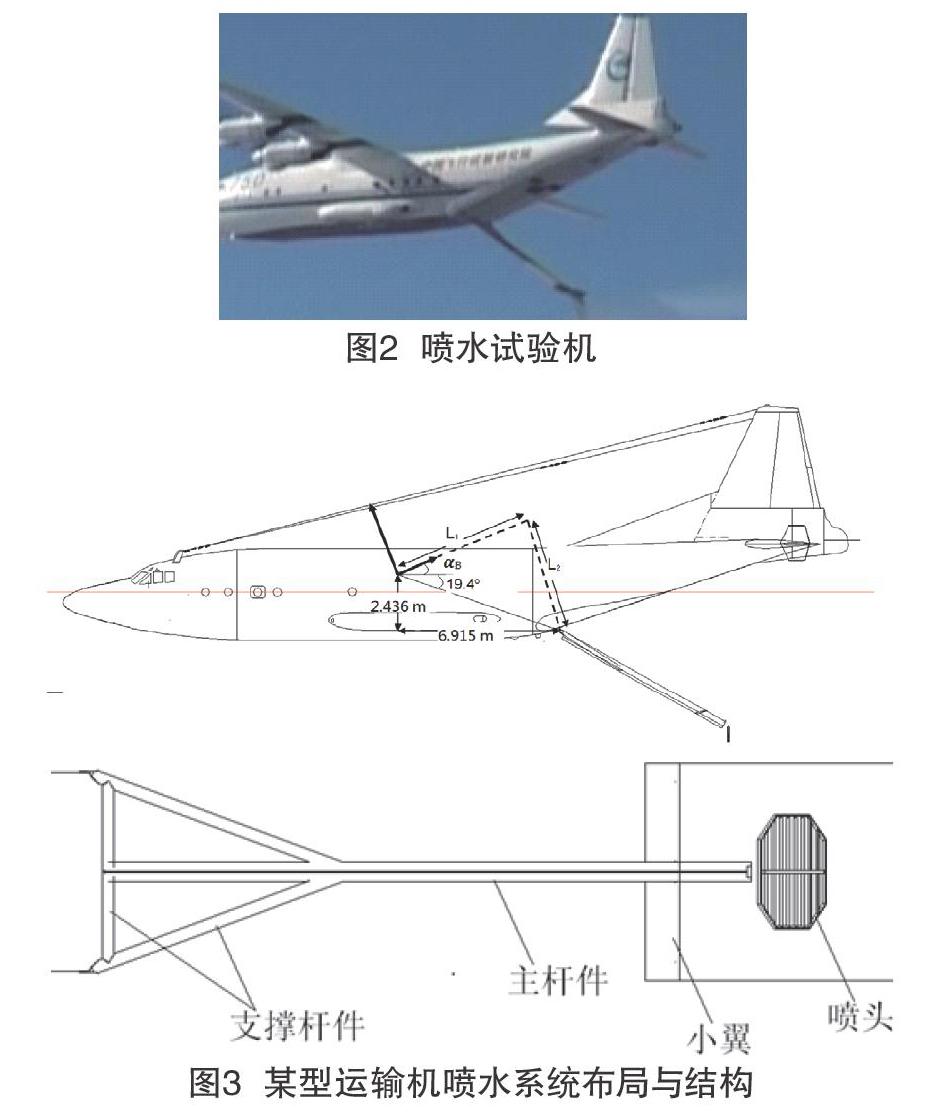
以某型运输机喷水系统为例,如图3所示,桁杆一端与机身尾部连接,可绕机身尾部沿机体轴俯仰方向转动,另一端连接喷头,在桁杆末端设计小翼作为控制舵面。在飞行过程中,通过小翼偏转产生的力和力矩来驱动桁杆偏转,调整喷头至合适的位置进行试验,本文以该喷水系统开展运输机外伸硬式桁杆系统控制律设计方法研究。
机体坐标系采用英美坐标系,部件坐标系:坐标原点为桁杆转轴与桁杆对称面交点,x、y、z三轴方向与机体坐标系相同。
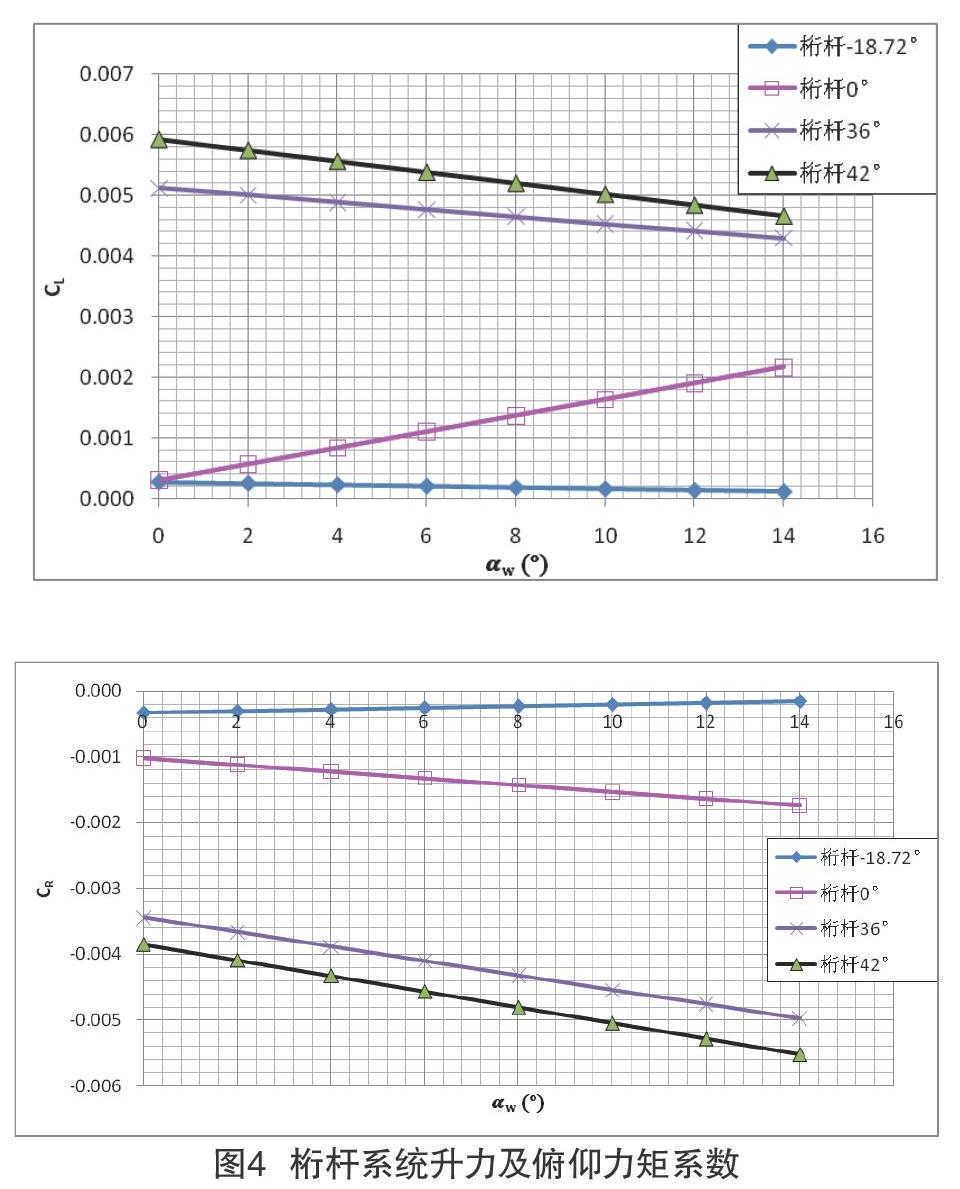
作用在桁杆上力矩包括重力产生的力矩、桁杆及喷头气动力(矩)及小翼的气动力(矩),其中小翼气动力矩为控制力矩。桁杆受到的气动力(矩)与桁杆偏角(桁杆与机身纵轴线的夹角,下偏为正)、飞行速度、迎角等相关。通过风洞试验,获得机体坐标系下桁杆系统各个部件气动力及力矩,通过坐标转换,获得桁杆系统在部件坐标系下的气动力及力矩。图4为部件坐标系下桁杆系统的升力及俯仰力矩系数风洞试验结果:在不同桁杆偏角下,桁杆所受的气动力、力矩随飞机迎角基本成线性变化,基于此,可采用小扰动线化理论对桁杆系统动力学模型进行线性化处理[5]。
根据动量矩定理,系统控制模型为[3]:
(1)
式中,qs为桁杆在部件坐标系中的俯仰角速度,为桁杆偏角,NR为桁杆系统在部件坐标系中受到的俯仰力矩,包括气动力矩及桁杆系统重力产生的力矩。
由于桁杆系统受到的气动力还与桁杆偏角、飞行速度及迎角有关,为使方程组(1)封闭,引入飞机纵向运动方程组,最终飞机-桁杆系统控制模型为:
(2)
其中A、B分别为系统状态矩阵和控制矩阵,x为系统状态向量,u为系统控制向量。
,为飞机空速增量,Δα为迎角增量,Δq为飞机俯仰角速度增量,Δθ为飞机俯仰角增量,Δqs为桁杆偏角角速度增量,Δ为桁杆偏角增量,,为飞机升降舵偏度增量,为发动机油门杆偏度增量,为小翼偏度增量。
从公式(2)可以发现,飞机-桁杆控制系统为耦合系统[3-5],桁杆系统状态量与飞机纵向状态量耦合,状态量的增多势必会导致模型阶数的提高,这对桁杆系统控制律设计是非常不利的。本文将以模型(1)为基础,研究桁杆系统对原机飞控系统的影响、桁杆系统控制模型简化以及控制律设计。
2 飞机-桁杆系统控制律設计
2.1 桁杆系统对原机飞控系统的影响
假定飞机在4000m高度,以400km/h表速做定常直线平飞运动,桁杆偏角40°,系数矩阵为:
耦合系统及原机纵向特征根如下:
表中1为短周期模态,2为长周期模态,3为桁杆系统运动模态。原机纵向短周期、长周期模态特性和飞机-桁杆耦合系统短周期、长期模态特性非常接近,加入桁杆系统后短周期阻尼比增加约4.5%,长周期阻尼比降低3.5%。其阻尼比变化远没有飞行过程中飞行状态改变引起的变化大,加入桁杆系统后并不会对原机飞控系统产生太大影响,原机飞控系统依然可以正常使用。
2.2 桁杆系统控制模型
模型(1)阶数高,不利于控制设计,需对控制模型进行降阶处理。由于桁杆系统气动力(矩)与桁杆偏角、飞行速度、迎角、俯仰角速度等有关,迎角的变化显著影响桁杆系统气动特性,桁杆系统自身阻尼特性则决定了俯仰角速度对其气动特性的影响,速度小幅变化对气动系数影响不大,综合以上分析,采用短周期模态结合桁杆系统运动模态的等效模型:
降阶控制模型特征根见表2,与未降阶模型特征根进行比对,对比发现简化模型短周期模态、桁杆系统运动模态特征根与耦合模型非常接近,短周期模态阻尼比降低3%,桁杆系统运动模态阻尼比降低约1.3%。降阶控制模型具有非常高的精度,能够满足桁杆系统控制律设计需求。
2.3 桁杆系统控制律设计
分析任务剖面的特点,飞机在指定高度进行定常直线平飞运动,操纵桁杆偏转到指定的角度开展相关工作,控制律设计目标为:飞行高度保持、飞行速度保持、桁杆偏角保持[6]。飞行高度、速度保持设计原飞控系统已经包含,本文在原飞控基础上结合模型(5)开展桁杆偏角保持控制律设计[6]。
根据表2的特征根计算发现,桁杆系统为欠阻尼系统,受到扰动后运动发散。为保证系统本身具有良好的阻尼特性,提升系统抗干扰能力,需设计阻尼器增加系统本身的阻尼特性;外环为了实现桁杆偏角保持,需设计桁杆偏角控制回路。综合以上分析,桁杆偏角保持控制回路如下:
设计驱动小翼偏转的舵机模型为:
桁杆系统降阶模型包含短周期模态,飞控系统中的纵向阻尼器改变了原机短周期模态特性,需引入原机纵向阻尼器,考虑其闭环特性。原机纵向阻尼器为:
式中,Kq为原机俯仰角速度反馈增益系数,Kq=0.995。引入原机纵向阻尼器,桁杆系统本体动力学模型为:
在控制模型(8)中,系统零点-3.0143、-1.4403与极点-3.0220、-1.4489近似相等可以约去,进一步降低控制模型阶数,桁杆系统本体动力学模型为:
其开环根轨迹如图6所示,设计内环阻尼比为0.875,其内环阻尼器反馈系数为:
外环通过比例控制提高收敛速度,为了保证系统最终的跟踪精度,降低稳态误差,引入积分环节,提高系统型别。基于以上分析,外环通过PI控制实现,外环控制律为:
桁杆系统外环开环根轨迹如图7所示,开环根轨迹上平面呈V形,这表明随着比例控制反馈系数的变化,在相当一部分范围内(),根轨迹不会穿越虚轴,系统都是稳定的。设计外环阻尼比为0.8,反馈系数为:
开环系统伯德图见图8,系统相位裕量47.2°,幅值裕量16.6dB,控制系统具有良好的稳定性。闭环系统伯德图见图9,系统带宽频率3.56rad/s,兼顾系统相应速度和抗高频干扰的要求;舵机带宽频率为15rad/s,为系统带宽的4.2倍,舵机满足使用要求。
2.4 仿真验证
将原机高度保持、速度保持控制器应用于模型(2),仿真结果见组图10,仿真结果表明控制器应用于原机及加装硬式桁杆系统后的飞机,其实例仿真曲线几乎完全一致,速度、高度能够很快平稳地跟随到期望目标,这表明针对2.3节的问题1,通过纵向模态的特征根比对反映桁杆系统对原机飞控系统的影响程度的方法是可行的,当飞机运动模态特征根接近时,飞机加装硬式桁杆系统不影响原机飞控系统正常使用。
桁杆系统保持平衡状态,给定5°阶跃增量,其仿真曲线如图11所示,5s后桁杆偏角跟随到期望数值并保持稳定,超调较小,控制效果很好,应用到飞机-桁杆耦合模型,时历曲线基本一致,说明本文降阶处理方法合理可行。
在桁杆偏角调整过程中,其小翼偏度如图12所示,为保證桁杆偏角增加10°,最终小翼偏度变化了0.5°,整个调节过程小翼偏度变化最大量约1.5°,过程变化平缓,舵机满足使用要求。
3 结语
本文通过对运输机外伸硬式桁杆系统风洞试验与力学分析,建立桁杆系统动力学方程,并进行降阶处理,在此基础上开展控制律设计并进行仿真,结果表明:
(1)通过飞机运动模态特征根量化桁杆对原机飞控系统的影响,加装外伸硬式桁杆系统不影响原机飞控系统的正常使用;
(2)采用飞机短周期模态与桁杆运动模态相结合的降阶模型具有非常高的精度,满足桁杆系统控制律设计需求;
(3)桁杆系统采用内环阻尼器增稳控制结合外环PI控制进行桁杆系统姿态控制的设计方法可行。
通过本文研究,可为运输机外伸桁杆系统控制律设计提供重要的理论参考。
参考文献
[1] 陆宇平,杨朝星,刘洋洋. 空中加油系统的建模与控制系统综述[J].航空学报,2014.,35(9):2375-2389.
[2] 蒋军昌,高亚奎,陈明.空中加油伸缩管装置控制系统研究[J].飞行力学,2008,26(2):87-90.
[3] 陈丽煞,贾秋玲,张贤雷.基于特征结构配置的硬式空中加油管解耦设计[J].计算机仿真,2010,27(11):28-31.
[4] Jeremy J.Smith, Donald L.Kunz. Simulation of the dynamically coupled KC-135 tanker and refueling boom[J].AIAA paper,2007.2007-6711.
[5] 姚建勋,袁冬莉,鲍泳林.基于Fluent的硬式空中加油杆气动特性计算[J].科学技术与工程,2012,19(12):4713-04.
[6] 何洁,许一鸣.硬式空中加油系统对接机构设计及其动力学特征[J].机械设计与研究,2019(4):209-212.
