机载LiDAR点云获取与高精度DEM建设关键技术探讨
2019-04-03 01:57:44杨辉山雷丽珍
测绘通报 2019年3期
杨辉山,雷丽珍
(广东省国土资源技术中心,广东 广州 510075)
机载激光雷达(light detection and ranging,LiDAR)是一种主动式对地观测系统,其应用过程中得到的点云数据可以准确地反映测量区域的地形地貌特征,具有高精度、高密度、高效率、高覆盖率及高分辨率等特点[1],其测量结果不易受植被的影响,能够直接测量植被下的区域,已成为最近几年数字高程模型(digital elevation model,DEM)生产的主要方式和手段。为及时满足各行业对高精度DEM数据的需求,广东省于2017年启动了机载LiDAR点云获取与高精度DEM建设项目。
国内外很多学者对LiDAR生成DEM技术进行了研究,许多行业、部门使用该技术生产DEM,获得了不同程度的成果[2-8]。这些成果,特定条件下的理论性研究多,少量工程应用主要是针对小范围或精度需求低的方向,具有一定局限性,项目实施时的一些关键技术急需研究解决。本文针对项目难点,对点云数据获取和数据处理的关键技术进行探讨,并用其指导生产实践,对保障项目的顺利开展有重要意义。
1 总体技术路线
1.1 项目难点
项目要求获取广东省约1.798×105km2的点云数据并制作DEM。DEM格网间距为2 m×2 m,成果精度要求为平地0.5 m、丘陵地0.7 m、山地1.5 m、高山地2 m。测区地形地貌复杂,山地占全省总面积的49.8%,水系占5.6%,乔木林占48.0%,且多为常绿乔木林;气候湿润,雨量充沛,晴天较少;经济发达,尤其是珠三角地区,人工地物复杂多样。测区复杂地形地貌、高覆盖植被、多云天气及高精度成果需求,对航飞设备、点云密度、植被穿透性、点云数据分类及处理等方面提出了较高要求,是项目实施的难点。
1.2 总体技术路线
机载LiDAR技术是将惯性导航系统(INS)、全球导航卫星定位系统(GNSS)和激光扫描测距系统进行集成,利用INS获得飞行过程中的瞬时姿态参数,通过GNSS获取激光扫描仪中心坐标(x,y,z),利用激光扫描系统获取扫描仪中心至地面点的距离,由此计算出地面上相应激光点的空间坐标(X,Y,Z),同时还可以获得反射率、激光脉冲回波次数等信息。在此基础上,通过一定的算法及人工编辑从离散的点云数据中区分出地面点和非地面点,将地面点数据内插后即可获得相应区域的DEM,总体技术路线流程如图1所示。
2 关键技术设计与实现
2.1 设备选择
目前使用较多的机载激光扫描仪是Leica、Optech和Riegl公司的设备,部分主流型号参数对比见表1。
大区域LiDAR数据获取需要多台(套)设备同时作业,本文对表1设备均有涉及。Riegl VQ-1560i、Riegl LMS-1560及Trimble AX80采用双激光头前扫和后扫的交叉扫描方式,两个通道扫描平行线彼此倾斜28°,植被穿透能力强,效率高,更适宜山区地形的数据获取。Pegasus HA500采用双通道配置,也有强穿透力的优势,但效率相对低。Leica ALS80-HP、Optech GalaxyT1000采用单激光头,激光能量与扫描频率呈反比关系,作业效率与植被穿透力存在矛盾,因此在植被覆盖少的区域具有更高的适宜性。
2.2 点云密度设计
参照有关技术规范[9],并结合项目实际情况,按照大范围平地及平缓丘陵点云密度不少于1点/m2,其他区域地形起伏较大,不少于2点/m2的要求设计。考虑当前主流设备都具有多次回波甚至全波形的功能,在植被覆盖的区域实际获取的数据密度是设计密度的2倍甚至更多,为尽量保证地面点的数量,在对点云数据成果进行点云密度计算时,提出以末次回波(含单次回波)计算的要求。
2.3 植被覆盖密集山区数据获取
对于植被无落叶期的区域来说,使激光穿透植被覆盖,获取足量的地面点是一大技术难点。激光的穿透能力与单束激光发射强度和光线入射角度正相关,在相同条件下,单束激光的能量越大,激光发射器与地面距离越近,经多次回波衰减后穿透树冠遮挡到达地面的并反射回到激光接收器的概率就会越高。此外,还需要考虑地形起伏与扫描角度的关系,如图2所示,随着瞬时视场角的增大,当背坡面坡度较大时,激光的衰减比例将增大,直至完全遮挡[10]。
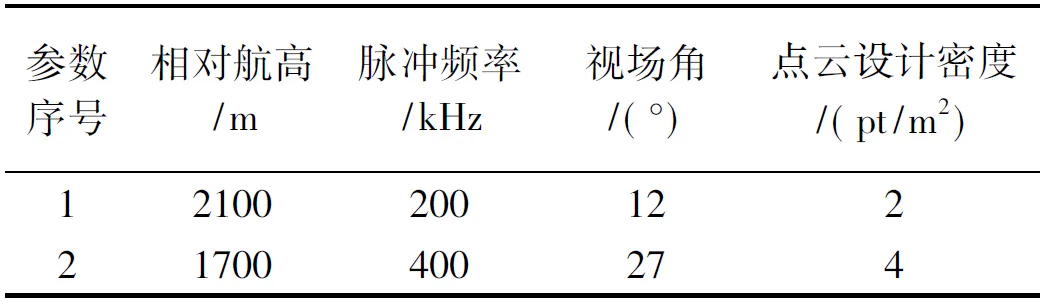
表1 主流机载激光雷达参数对比
在同一区域内选择同一型号设备采用不同航飞及设备参数(见表2),将获取的点云数据进行叠加对比,可以看到同一断面下穿透植被获取到的地面点有显著差异,参数1获取的地面点明显优于参数2(如图3所示)。因此,针对植被密集覆盖山区,为获取到尽量多的地面点,在进行航线设计时,在考虑效率的同时,应降低激光脉冲频率及视场角设置、适当降低相对航高。

表2 航飞及设备参数设置
2.4 点云数据分类组合算法
分离地面点是整个滤波过程中最重要的环节,目前广泛采用基于不规则三角网的滤波算法。其过程为:获取一定的地面种子点组成初始的稀疏不规则三角网,对各点进行判断,如果该点到三角面的垂直距离及角度小于设定的阈值,则将该点增加到地面点集合;使用所有确定的地面点,重新计算不规则三角网,再对非地面点集合内的点进行判别;如此迭代,直到不再增加新的地面点,或者满足给定条件为止。该算法的关键是阈值选取,使用不同的阈值会产生截然不同的滤波结果。其中有3个重要参数来控制地面点分类的精度:最大建筑物尺寸、迭代距离、迭代角[11-12]。若测区内有大量建筑物,需根据实际最大建筑物尺寸设定参数,否则可能将建筑物错分为地面点,若测区为山区,建筑物较小,则此参数可适当变小,同时要兼顾测区的地形条件;荒芜郊区可选择较小的迭代距离参数,城区则迭代距离适当增大;在平缓地区选择较小的迭代角参数,在陡峭地区,适当增大迭代角。
在航带重叠区,激光在不同航带对同一位置的入射方向呈以该处铅垂线为中轴的对称关系,可从不同方向到达地面。充分利用这些点将有助于提高地表高差较大或植被密集区域滤波后地面点数量及分布。在海量数据进行处理时,宜采用下列组合算法:①将航带间重叠区域距离航带中心线较远的点分为类别12(冗余点);②叠加对测区内所有航带,按作业区域进行数据分块,一般采用矩形分块,数据量不大于2 GB;③对类别12(冗余点)进行滤波,将滤出的地面点分为类别1(未分类点);④对类别1(未分类点)进行滤波,将滤出的地面点分为类别2(地面点)。
自动滤波完成后,应采用人机交互方式进行精细分类,对分类错误的点重新分类。以点云剖面为主要依据,辅助影像等资料进行分析。在比较平滑、直线区域切剖面时,剖面宽度可适当放大,在拐角尤其是立交桥、高架公路等接地与架空的临界区域,切剖面要尽量窄,务求精确。
2.5 空白区处理
数据获取漏洞或滤波之后产生的地面点空白,需要进行DEM内插处理,也会影响到DEM生成的精度。为提高空白区DEM精度,本文针对反射率较低的水体,以及因植被覆盖过密确实无法穿透区域的情况进行了研究。
(1) 静止水体空白区。静止水体包含湖泊、水库、池塘等,其特点是水体范围内DEM要求高程一致。根据实际情况,可选择带有高程信息的精确匹配的面状水域范围线等参与DEM生成[13-15]。面状水域范围线可在点云处理软件中直接绘制,但珠三角地区水域纵横,直接绘制工作量大。考虑到地理国情监测中提取的地表覆盖水域数据,经对比其现势性与数据精度较好,可用于辅助水体特征线绘制。
对提取出水体范围面叠加同区域滤波处理后点云输出的0.5 m格网DEM底图进行对比编辑,重点修改位置精度差异,然后将其导入点云处理软件,自动读取单个多边形面域内点云数据最低点高程值作为水体特征线高程,通过对关键点构三角网,并进行内插处理后,再实现格网对栅格数据的转变,进而得到地面DEM。
(2) 植被遮挡导致的山区地面点稀疏区。一般情况下,采用量取树高推测地面点位置,人工添加少量特征点,原有低精度DEM数据可转换为LAS点云格式,与LiDAR点云叠加,作为辅助判断地形走向的依据之一。在该类空白较大的区域,提出一种内插方法,以LiDAR点云数据的地面点作为骨架,利用高斯核函数加权或反距离加权算法,将低精度DEM的地形坡度坡向信息内插至LiDAR点云相应区域,模拟低精度区域的地面精细模型。本文算法内插结果相对于利用LiDAR点云地面点直接进行三角网内插DEM,可大量减少“三角面片化”问题,有效提高DEM成果质量。
3 结 语
本文以广东省机载LiDAR点云数据获取与高精度DEM建设项目为背景,探讨了点云数据获取及处理的关键技术与可行方案。目前,项目正顺利开展,省级测绘质量检验机构对已获取的10批次共6.8×104km2航飞数据进行了验收,质量良好;从前期生产的少量DEM成果中抽取950 km2区域进行外业精度检测,施测了237个野外检查点,高程中误差为±0.19 m。通过点云数据制作的DEM,能够满足各行业对全省范围高精度DEM数据使用的需求。
如何定量分析地物回波强度与地面点的关系,以及在山地植被密集区获取更多的地面点将是下一步的研究方向。
猜你喜欢
河北地质(2022年2期)2022-08-22 06:24:04
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
现代园艺(2017年23期)2018-01-18 06:58:12
应用海洋学学报(2015年2期)2015-11-22 07:36:28
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
发明与创新(2015年30期)2015-02-27 10:39:52
河南科技(2014年4期)2014-02-27 14:07:25