无人机用于输电线路巡检的作业流程及应用
2019-03-25 11:49:34张思青
能源研究与信息 2019年4期
兰 昊,米 珂,程 帅,张思青
(1.西安热工研究院有限公司,陕西 西安 710032;2.昆明理工大学 冶金与能源工程学院,云南 昆明 650093)
随着社会经济的迅猛发展及城市化步伐不断加快,各行各业对电力的需求越来越大,因此以超/特高压输电线路为主骨架的全国互联大电网应运而生。然而,由于电网规模和电压等级迅猛扩大,随之而来的新的电网运行模式对超/特高压输电线路运行检修技术提出了更高的要求。超/特高压输电线路电压等级高、输送距离远、塔架较以往高且穿越地形比较复杂。为了掌握输电线路的运行状况以及时排除电力安全隐患,电力部门需投入大量人力、物力对输电线路进行定期巡检,并且有时由于复杂地形、极端天气等人为不可控因素的影响在时间上更是存在捉襟见肘的尴尬局面[1]。目前对输电线路巡检主要采用地面人工周期巡检。这种人工巡检方法不仅工作量大且由于部分巡检线路自然环境恶劣对巡检人员的人身安全也造成了巨大的威胁,同时人工巡检效率低,巡视周期长,巡视质量难以控制,且存在巡检盲区,容易出现遗漏缺陷的现象。近年来随着民用无人飞行器技术的发展,无人机的应用不断进入新的领域,由于其优越的航拍性能将无人机应用于电力巡线已逐渐成为可能。
无人机是一个集航拍传感器技术、飞行控制技术、无线通信遥控技术、无线图像回传技术、全球定位导航航拍技术、计算机编程技术等多技术并依托于硬件的高科技产物[2-3]。首先是其具有自动跟踪识别的能力,目前其视觉识别技术已日趋成熟,可将其成功应用于日常电力巡检,它就会根据所设定的巡检线路识别点,实现无人自动巡检。其次是智能避障能力,它能自动识别并躲开电线、电杆、塔架之类的障碍物,实现安全、平稳的飞行。这两项技术的运用使无人机的智能水平大大地提高。
1 无人机巡检发展现状
依托自身先进的无人机技术发达国家最先将无人机应用于电力巡检。目前,在该领域发达国家仍处于领先地位。相比于国内刚开始对无人机巡检系统展开研究,发达国家已在关注后续的图像、数据处理方面的研究。近年来,我国国家电网公司已组织相关科研人员开展无人机巡检系统的研究, 目前已取得阶段性的成果。研究人员针对输电线路巡检用的无人机系统进行了研究,讨论了包括可见光探测、红外探测和无线数据传输等问题;另外,有研究团队以四旋翼飞行器作为输电线路巡检载体,以地面监控及图像处理设备为支撑,形成输电线路立体巡检系统并已成功运行,该系统能够实现线路缺陷的离线诊断,对缺陷的自主在线诊断正在研究之中[4-6]。
2 巡检作业内容
目前,运用无人机进行输电线路巡检作业按照巡检内容主要分为线路本体、附属设施、通道及电力保护区三大部分。
2.1 线路本体巡检
线路本体巡检主要包括:
(1)地基与基面。需检查挖掘后回填土是否出现下沉,地面是否水淹、冻胀,以及是否有堆积杂物等情况。
(2)塔杆。需检查杆塔基础是否出现破损、疏松、裂纹、露筋等;杆塔倾斜、塔材变形、螺栓丢失、严重锈蚀、脚钉缺失、爬梯变形、土埋踏脚等;混凝土杆未封杆顶、破损、裂纹、爬梯变形等情况。
(3)接地装置。需检查是否出现接地体断裂、严重锈蚀、螺栓松脱;接地体外露、缺失,连接部位有雷电烧痕等情况。
(4)绝缘子。需检查是否出现伞裙破损、弹簧销缺损,绝缘子串严重倾斜;钢帽裂纹、断裂,钢脚严重锈蚀或蚀损、有放电痕迹;绝缘子温度异常等情况。
(5)导线。线路金具散股、断股、断线;放电烧伤、严重锈蚀,悬挂漂浮物、覆冰;弧垂过大或过小,导线异物缠绕,导线对地及交叉跨越距离不足;舞动、风偏过大等情况。
(6)线路金具。需检查是否出现线夹断裂、销钉脱落、严重锈蚀;均压环、屏蔽环烧伤、螺栓松动;防振锤跑位、脱落、严重锈蚀、阻尼线变形;间隔棒松脱、变形或离位、悬挂异物;线夹、接续管、耐张管、引流板等异常发热;线夹、均压环、屏蔽环异常放电等情况。
2.2 附属设施巡检
附属设施巡检主要包括:
(1)防雷装置。需检查线路避雷器是否存在动作异常,计数器是否正常工作、引线接头是否松脱等情况。
(2)防鸟装置。需检查鸟刺及驱鸟装置是否出现变形、破损、螺栓松脱等情况。
(3)监测装置。需检查是否存在缺失、损坏、断线、移位等情况。
2.3 通道及电力保护区巡检
通道及电力保护区巡检主要包括:
(1)检查线路与附近建筑物、树木等障碍物是否保持足够的安全距离。
(2)检查在线路下方或保护区是否存在有危及线路安全的施工作业及其他安全隐患。
(3)检查线路附近是否存在易燃易爆物品及烟火现象。
(4)检查是否存在由于自然灾害引起通道环境变化。
3 巡检机型分类
目前,根据应用领域与作业范围的不同,市面上无人机的种类繁多。但针对于输电线路巡检的无人机机型主要有固定翼无人机、无人直升机以及多旋翼无人机三种。
固定翼无人机飞行距离长,速度快,巡航面积大,在巡检作业中适合对线路走廊大面积快速巡视,但由于其自身结构原因,不能悬停获取连续某处影像,且只能按照固定航线飞行不够灵活,飞行转弯弧度大,飞行速度快,因此对其所携带的设备性能要求高,操作难度较高,同时对起飞降落场地有一定要求。
无人直升机可以实现定点起降,并且可以进行空中悬停,但抗风性较差,抖动较严重,拍摄出的影像容易出现虚化、条状影带等问题,难以获得高质量的影像。
多旋翼无人机体积小、重量轻、噪音小、隐蔽性好,适合多平台,多空间使用,飞行稳定性高,抵御气流干扰能力强。飞行高度低,具有很强的机动性,执行特种任务能力强,可以对线路杆塔、绝缘子、金具等设备进行高质量影像信息采集,便于技术人员进行后续分析。综合分析后,设计了六旋翼无人机+高分辨率相机作为本次输电线路巡检作业的飞行器,如图1所示。

图1 六旋翼无人机+高分辨率相机Fig.1 Six-rotor UAV with high resolution camera
4 巡检作业流程
无人机巡检作业作为一种新型巡检模式,目前仍处于试验阶段,且整个巡检作业流程还没有统一的行业规范。本文根据南方电网贵州某超高压输变电工程的实际情况,采用六旋翼无人机进行巡检作业,将巡检作业流程优化为:人员配备、作业前准备、无人机准备、巡线工作、图像视频传输、图像处理等[7-8]。
4.1 人员配备
应根据巡检任务和所用机型合理配置人员,一般小型机需操作人员2~3名,中型机3~4名,大型机5~8名。巡检作业前应对作业区域的航空、气象、地理等必要知识进行了解。
4.2 作业前准备
巡检前作业人员应进行现场勘查,确定作业内容和无人机起、降点位置,了解巡检线路情况、海拔高度、地形地貌、气象环境、植被分布、所需空域等,并根据巡检内容合理制定巡检计划。必要时作业单位要向航空管制部门报批巡检计划。
4.3 无人机准备
巡检作业前应检查无人机机身各部件是否存在损伤,机体与云台信号连接是否正常,以及电池电量、燃油燃料是否充足等。
4.4 巡检工作
(1)单侧巡检
对500 kV及以下电压等级的交、直流单回或同塔双回输电线路,在无人机传感器视场能够覆盖巡检目标且目标间无明显遮挡时,宜采取单侧巡检方式。同时对较陡山坡线路区段采取单侧巡检方式,无人机处于远离山坡侧。
(2)双侧巡检
对500 kV及以下电压等级的交、直流同塔四回及以上输电线路,以及500 kV以上电压等级的交、直流输电线路,在无人机传感器视场无法覆盖巡检目标或目标间有明显遮挡无法区分时,应采取双侧巡检方式。
(3)巡检方法
巡检时无人机以较低的速度起飞并接近杆塔,与杆塔之间保持适当的安全距离进行匀速飞行,针对故障多发区及疑似故障点可在杆塔附近悬停拍摄,使信号传感器在稳定状态下进行数据采集,确保数据的有效性与完整性。中型、大型无人机杆塔巡检高度宜与线路地线横担等高或稍高,当下端部件视角不佳不能看清时,可适当下降高度。手动操作飞行时,中型、大型无人机外缘与杆塔及线路边导线巡检侧外缘水平距离分别不小于15、20 m。自动飞行时,各水平距离比手动操作飞行时相应增大10 m。中型、大型无人机在每基杆塔处低速或悬停巡检时间依照无人机具体性能参数及所携带传感器数据采集时间决定。小型无人机可根据实际需求调整悬停姿态及时间,无人机外缘与待巡检设备、部件的水平距离一般不宜小于10 m,可根据无人机性能、线路电压等级和巡检经验调整。同时禁止无人机在导线之间穿行。
4.5 图像视频传输
无人机在线路巡检过程中,无人机搭载的摄像头对巡检对象进行实时飞行画面拍摄,通过无线视频图像传输模块将拍摄的画面传输到地面监控系统。地面技术人员通过视频可以了解无人机当前位置与待检测目标大概距离、无人机安全问题等。当无人机达到指定巡检地点后,通过地面指令,控制无人机悬停并切换相机工作模式,对预定检测区域进行拍摄。无人机拍摄的影视资料会自动保存在相机相应的存储区,同时通过无线视频图像传输模块,将拍摄的图像传输到地面监控系统,便于技术人员进行后续分析[9-12]。
4.6 图像处理
目前对于无人机拍摄得到的图像处理主要包括:首先对其进行人工浏览,对明显的故障点进行识别并做好故障点登记;其次对于其中可能存在故障的图片,进行仔细的图像识别处理;认真核查是否存在故障点,必要时对个别无法识别的故障点进行二次实地勘测;随着影像匹配技术、自动空中三角测量技术和海量影像数据处理技术的日趋成熟,处理无人机低空影像数据的软件日趋增多,现阶段已基本上具备了对无人机所拍摄的影像数据进行自动化处理的技术条件。
5 无人机输电线路巡检实际应用
依托贵州某超高压输变电工程,对无人机巡检模式进行实地测试。根据当地实际地形和自然环境设定合理的巡检路线。此次无人机巡视线路为 500 kV双回线路,线路总长度为 7.14 km,共18基杆塔。在室外温度5℃下,南方电网贵州某电力公司仅用2 h就顺利完成巡检工作,累计发现通道隐患8处,复检核查未消缺陷6处。图2、3分别为在巡检路线中发现的绝缘子断裂隐患和塔间鸟窝隐患。图4为观测到的云台红外探测图。本次无人机输电线路巡检测试有效地节约了巡检时间,降低了人工巡检成本,工作效率提升了60%以上。且无人机相继完成了高清巡视和红外测温两项工作,并不断变换拍摄角度和距离,对导线挂点部位进行悬停拍照。对导线、间隔棒、线路通道等进行了重点巡视,实现了图像的实时回传和快速拼接,有效辅助了工作人员对山区线路的巡检工作,实现了输电线路巡视“360°无死角”,极大地保障了电网的安全稳定运行。
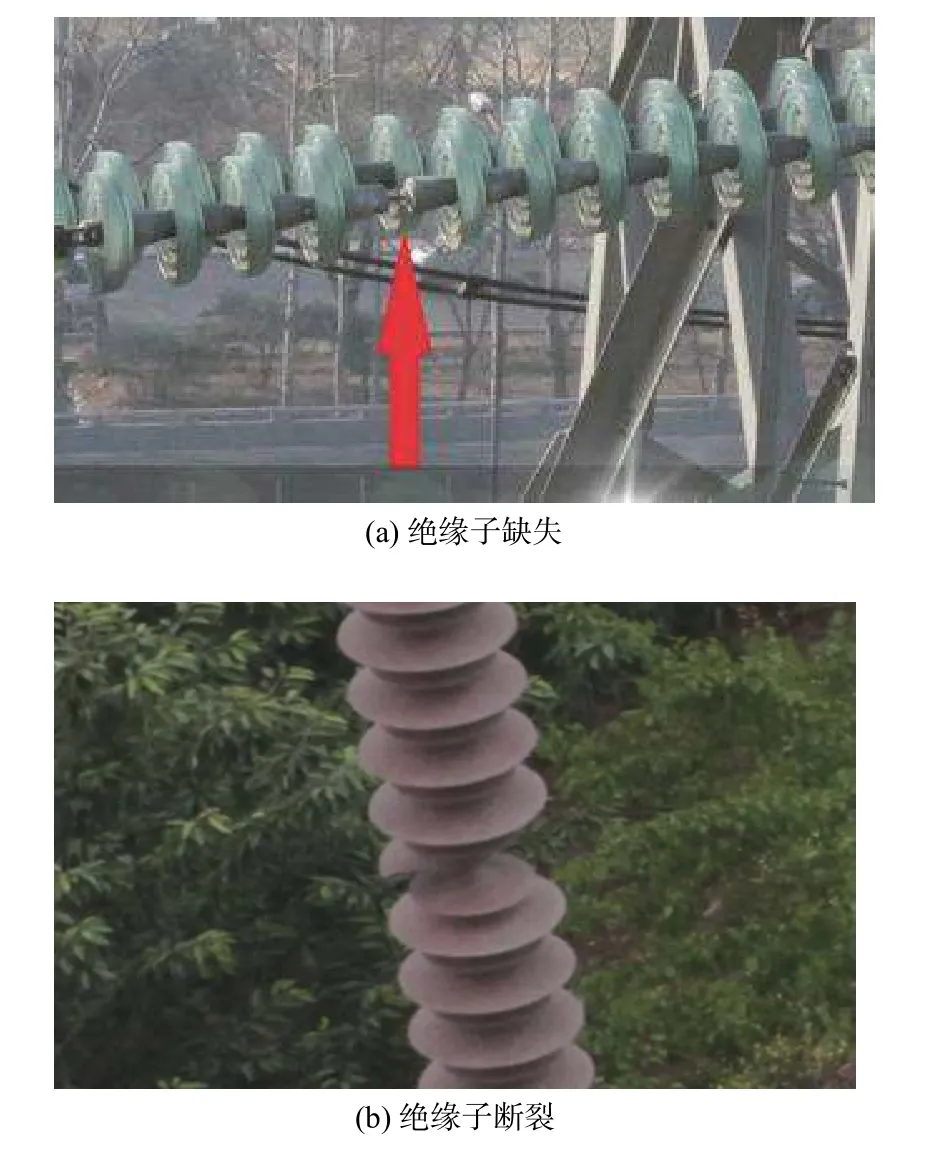
图2 绝缘子断裂隐患Fig.2 Accident of the insulator fracture

图3 塔间鸟窝隐患Fig.3 Hidden nest between two towers
6 无人机巡检作业中存在的问题
(1)需提高远距离无人机的通信能力
现阶段受无线通信技术的限制,无人机巡线作业需操作人员现场操控,且巡检范围不能超过它的最大遥控距离,同时也不能实时地将无人机获取的现场图像传回集控指挥中心,无法实现集控操控。虽然目前一些新型无人机可以接入3G移动通信和无线网络模块,但巡检作业经常穿越一些没有移动信号覆盖的区段,致使该技术的应用受到了一定限制[12]。
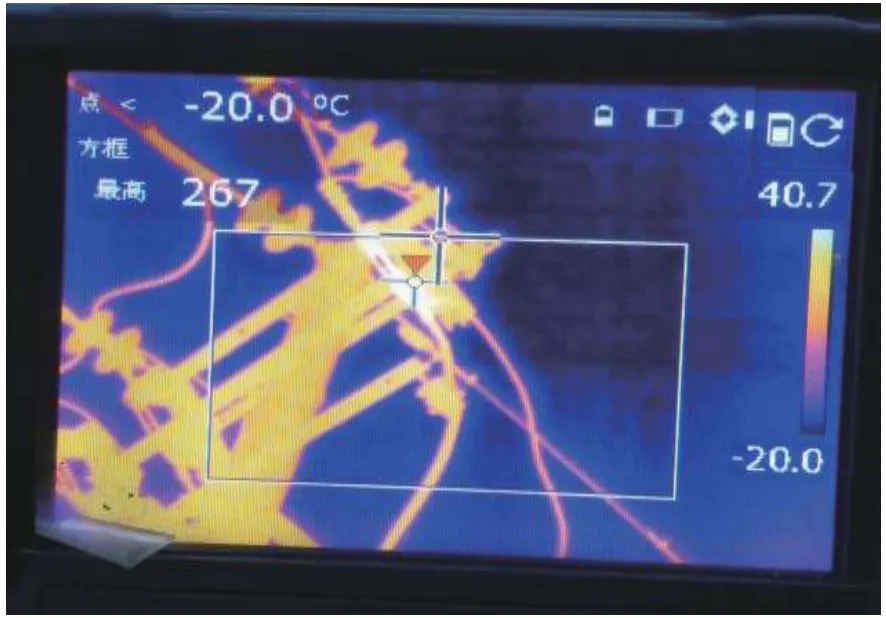
图4 云台红外探测图Fig.4 Infrared detection picture in pan-tict-zoom
(2)需提高无人机的避障能力
安全问题是输电线路巡检过程中的重中之重。无人机巡检过程中,难免会遇到交跨线路、树木、建筑物等障碍物。无人机是通过GPS方式进行导航定位的,由于GPS存在误差,所以无人机在执行任务的过程中可能会出现偏离预定航向的情况,造成无人机与输电线路或其他障碍物发生碰撞。虽然目前无人机已具备一定的智能避障能力,但仍然缺乏应对预期外障碍物的紧急避让能力。
(3)需提高无人机的飞行操控能力
由于巡检的输电线路一般较长,且部分线路或区段穿越山区、丛林或无人区。因此在一些极端情况下,是否能够确保无人机飞行平稳,不发生振动和抖动,并且能有效地捕捉线路故障点,这对无人机操控人员的飞行操控能力要求极高。
(4)需研究应对无人机坠毁所引发的次生灾害的方法
对于无人机自身而言,由于某些机型以燃油作为动力,其坠毁本身就是一个危险源。在建立完善、可靠的无人机巡检作业流程外,还应研究降低在无人机巡检发生坠毁后所引发次生灾害的几率,重点在于对其机身的可燃性物质的控制,防止其坠毁所引发的山火灾害。主要包括无人机整体材质的选择、燃料的选择以及自身保护装置等。从燃料角度考虑应选择不易燃烧,燃点高的航空煤油或柴油。从结构设计角度考虑,无人机的油箱设计时应采用不易燃烧的非金属复合材料,同时设计时应注重燃油的不易洒落,遇到碰撞或坠毁后能够保证燃油的不易燃烧,确保无人机即使在发生坠毁的情况下也不会引发更大的危害[13-16]。
7 结束语
传统的人工巡线方式不仅工作强度高,且由于“视觉盲区”的存在巡检质量低以及部分巡检线路自然环境恶劣,特别是对一些自然环境相对恶劣地带,如高山峡谷、浅滩湿地、密林无人区等特殊区域的输电线路巡检时具有很多困难。但无人机巡检可在各种恶劣气候、复杂地形、灾害天气情况下以极低的人工成本,获取高精度的图像信息,以此可准确、高效地判断设备运行状况,提高巡视效率并避免巡检事故的发生。此次无人机在贵州某超高压输变电工程的实地巡检,充分说明了无人机巡检的高效性。并且对所提出的无人机巡检作业流程进行了有效的校验。试验证明针对不同的巡检作业内容与巡检机型,该巡检作业流程都能高效地完成巡检作业内容,其设计合理且可操作性强。此套统一、规范的无人机巡检作业流程的提出,将极大地促进无人机在输电线路巡检方面的应用与推广。同时基于智能电网与超/特高压输电线路建设的大背景,无人机巡检作为电网安全稳定运行的有力保障必将受到广泛关注。在不久的将来无人机巡检势必成为一种快速、高效,大有发展前途的输电线路巡检方式。
猜你喜欢
卫星应用(2022年1期)2022-03-09 06:22:30
少年博览·初中版(2020年6期)2020-06-12 11:42:23
建材发展导向(2019年5期)2019-09-09 09:25:10
电子制作(2019年11期)2019-07-04 00:34:36
电子制作(2018年12期)2018-08-01 00:48:08
故事大王(2016年7期)2016-09-22 17:30:08
电测与仪表(2016年23期)2016-04-12 00:23:14
电测与仪表(2015年2期)2015-04-09 11:29:24
河南科技(2014年15期)2014-02-27 14:12:26
儿童故事画报(2013年3期)2013-06-24 05:40:30