
基于改进模型的异步电机最小二乘参数辨识
2019-03-23 02:55孟庆硕许鸣珠
石家庄铁道大学学报(自然科学版) 2019年1期
孟庆硕,许鸣珠
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
自从矢量控制等高性能变频调速技术的诞生,电机的参数辨识问题便成为了国内外学者的研究热点。矢量控制技术的关键在于转子磁链角的估算,用于实现转子的磁场定向,准确获取转子的时间常数,成为了解决该类问题的关键。但该参数在使用前往往是未知的,因此要实现异步电机矢量控制等高性能变频调速技术,必须预先获得电机的该项参数[1]。
最传统的异步电机参数检测方法莫过于转子空载、堵转和互感实验了,但这样获取的电机参数是粗略的。目前较实用的电机参数辨识典型方法有递推最小二乘法(RLS)、扩展卡尔曼滤波法(EKF)、模型参考自适应法(MRAS)等等。
其中,最小二乘法是常用的参数辨识方法,其目标函数为测量结果对计算结果误差的平方和,最小目标函数值等于零。其递推算法适合于异步电动机参数辨识,计算量也不算很大,但其线性化模型需要用到目标函数对电动机参数的二阶导数,对测量噪声和转速波动很敏感[2-4]。针对这些问题,采用基于转子磁场定向的异步电机同步旋转轴系的矢量方程,建立了电机的转子时间常数参数估计模型,本方法只需要获得一阶导数,同时采用二阶巴特沃思滤波器进行滤波,降低了噪声的影响。利用改进欧拉算法对巴特沃思状态方程进行求解,可以直接得到滤波后电流的一阶导数,不需要对参数进行离散化处理,降低了计算误差。在实际控制中采用双闭环的PI控制,对速度具有较好的控制效果,避免了速度波动对计算的影响。
1 递推最小二乘法参数估计理论
1.1 最小二乘参数估计理论概述
最小二乘法最早于1975年由高斯(K.F.Gauss)在形体运动轨迹预报研究工作中提出来,被广泛应用于系统辨识和参数估计,甚至在许多估计方法无效的情况下,最小二乘法却可以提供最简单有效的解决办法[5-6]。随着该理论的发展,递推最小二乘法、遗忘因子法、偏差补偿法、修正的辅助变量法等多种最小二乘估计算法相继出现,这些方法被应用于不同的系统参数估计系统中。
最小二乘估计算法可以解决线性定常系统、线性时变系统、含有色噪声的线性系统等参数估计问题。在利用最小二乘法对异步电动机进行参数估计时,主要是将电机的非线性模型线性化,得到与电机参数有着直接关系的线性化模型,再对其进行参数估计。
1.2 递推最小二乘法参数估计法
递推最小二乘法应用广泛,与一般的最小二乘法比较,避免了大矩阵求逆运算,计算量小、计算速度快且收敛速度快,可以实现实时在线应用。
由文献[7]~文献[10]可知,递推最小二乘法的参数估计算法为

令P(0)=aI,θ(0)=ε,α为充分大的正实数,一般为104~1010之间,ε为充分小的正实数向量,一般取0。
2 异步电机的线性化数学模型
根据文献[11],可以得到异步电机在任意旋转轴系下的暂态电流导数方程

式中,σ=1-(L2m/LsLr);uM、uT为MT轴系定子电压矢量M、T轴分量;iM、iT为MT轴系定子电流矢量M、T轴分量;im、it为MT轴系转子电流矢量M、T轴分量;Rs为定子电阻;Rr为转子电阻;Ls为转子电感;Lr为转子电感;Lm为励磁电感;ωs为转子磁链矢量ψr的电角速度;ωr为转子的电角速度。
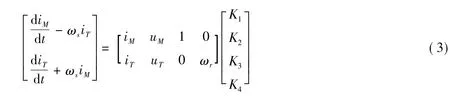
将式(2)改写成矩阵的形式如下
其中

由式(3)可知,经过坐标变换得到了以定、转子电阻、电感、转子磁链为未知量的线性方程,y(k)=φT(k)θ,可运用最小二乘法对电机参数进行估计。输出矩阵

参数矩阵
输入矩阵

由于参数K3对应的输入为常数1,可能会造成该项收敛速度慢,精度低等缺点。由于K3项中就包含K2项,因此,将K2上次的估计值代替1,此时K3项变为

输入矩阵变为

电机的运行往往是由静止到稳态的过程,利用电机的暂态过程可以对电机的转子时间常数Tr=-K4/K3、漏感常数Lsσ=1/K2进行估计。当电机由暂态进入稳态,此时 ψr=0,d iM/d t=0,d iT/d t=0,进而可以根据在转子磁场定向下转子磁链 ψr=-(Rrψr)/Lr+(LmRriM)/Lr得ψr=LmiM,结合估计值θ,进一步求得电机的各参数

3 巴特沃思滤波器
由于采集的电压和电流信号含有高次谐波和噪声,因此除了硬件上的模拟滤波外,还必须对信号进行数字滤波处理。加入滤波必然造成信号的衰减和时延,为了能够实现对参数的精确估计,电压和电流信号必须同步和同比例采样。这就要求对电压和电流信号要进行相同的滤波。此外,由式(3)可知,在采用递推最小二乘算法参数估计时,除了需要采集电压和电流信号外,还需要得到电流信号的一阶导数。
因此,采用二阶巴特沃思数字滤波器对电压和电流信号进行滤波,二阶巴特沃思数字滤波器的传递函数系数可查表获得。并将其传递函数转换成状态方程形式(13),写成能控标准型,便于运用改进的欧拉方法进行计算,这样可以直接求解出电流值和其一阶导数。避免了对导数的离散化,简化运算的同时提高了计算精度。
3.1 巴特沃思滤波器设计
巴特沃思低通滤波器的系统函数完全由3 dB截止频率Ωc和阶数N确定。其传递函数为Ha(s)=ΩNc
/DN(s)。其中,分母DN(s)称为N阶巴特沃思多项式

因此,其传递函数为

式中,Ωc为低通滤波器截止频率;b0,b1为滤波器系数,可在文献[12]查表获得。
将式(12)转换成状态方程,写成能控标准型

其中

式中,状态变量即为滤波后的电流及其1阶导数。
3.2 改进的欧拉方法
改进的欧拉方法先用Euler格式求得X(k)一个初步的近似值,称为预测值。预测值的精度可能不高,再用梯形公式将它校正一次,得到其校正值[13]。
预测值
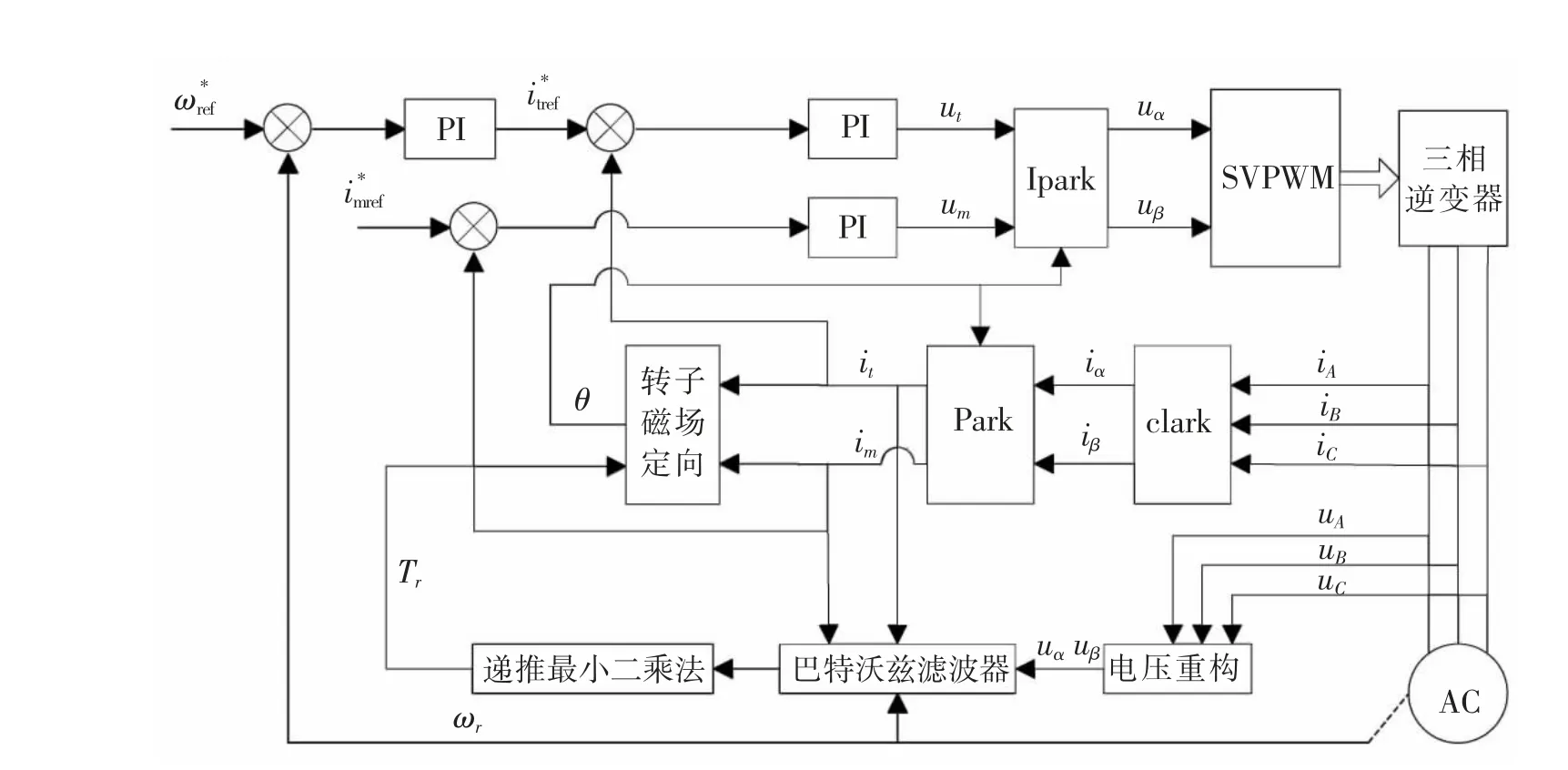
图1 控制系统结构框图

式中,Xp(k)=[uFp(k) uFp(k)]T为状态变量的预估数值解;Ts为采样周期。
由式(15)得到状态变量预估值

校正值

解得状态变量校正值为

通过对式(18)进行N次迭代即可得到uF(k),uF(k)即为最终状态变量数值解。
4 实验结果
本文采用异步电机矢量控制实验平台,通过该实验平台来验证所提参数估计算法。整个控制系统采用TI公司的TMS320F2812DSP芯片来实现参数估计算法。
实验用异步电机额定参数为:Pn=250 W;Un=36 V;In=9 A;ωn=1 400 r/min;极对数P=2。DSP系统时钟150 MHz,PWM调制频率为15 kHz。电压信号采样通过测试母线电压,利用电压重构技术得到A,B,C相电压。电流信号采样采用霍尔传感器对其进行测量。采样频率为15 kHz,二阶巴特沃思滤波器的截止频率为10 Hz,迭代次数为10。图1为控制系统结构框图。
本实验是在电机由静止状态运行到额定状态,得到的参数都为电机在额定情况下的参数。从图2~图6可知,在辨识初期电机各参数波动明显,但很快趋于稳定值,证明该辨识系统辨识速度快、稳定性好。表1为转速1 400 r/min时3次辨识的结果,每个参数误差都在5%之内,辨识效果较为准确,对于电机运行控制来说已经达到了足够的精度。
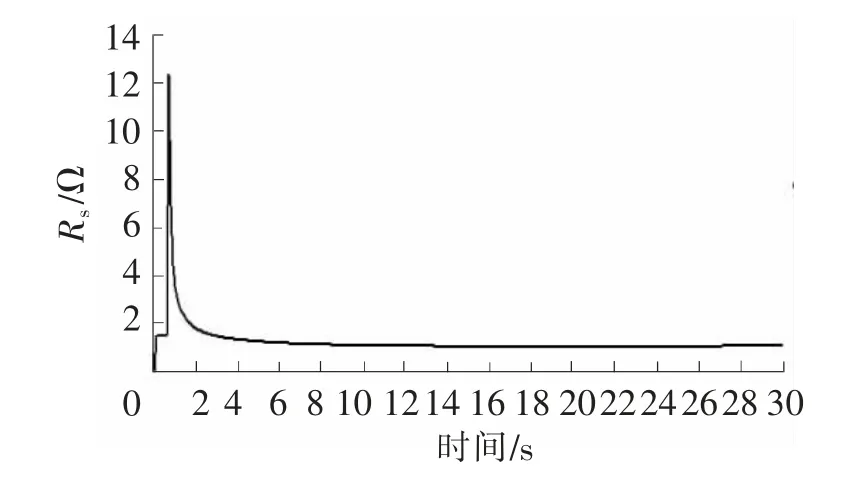
图2 定子电阻辨识曲线
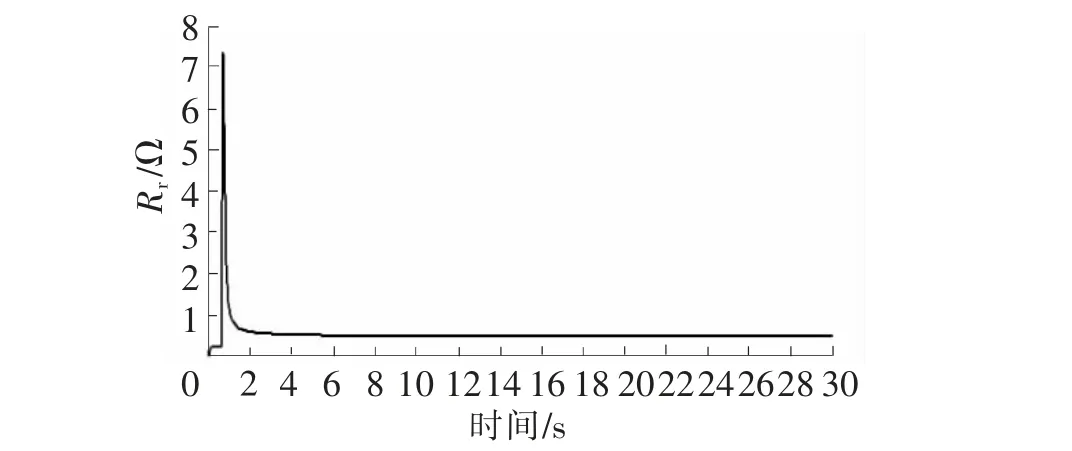
图3 转子电阻辨识曲线
5 结论
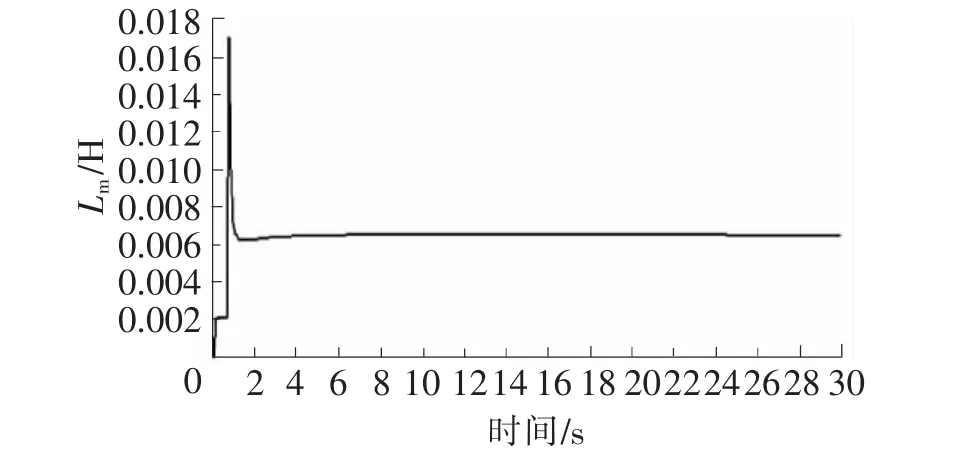
图4 互感辨识曲线
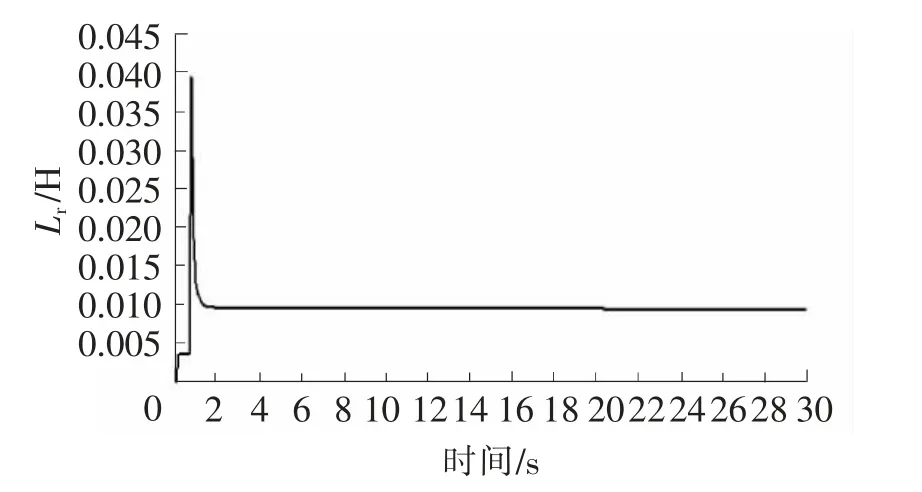
图5 定转子电感辨识曲线
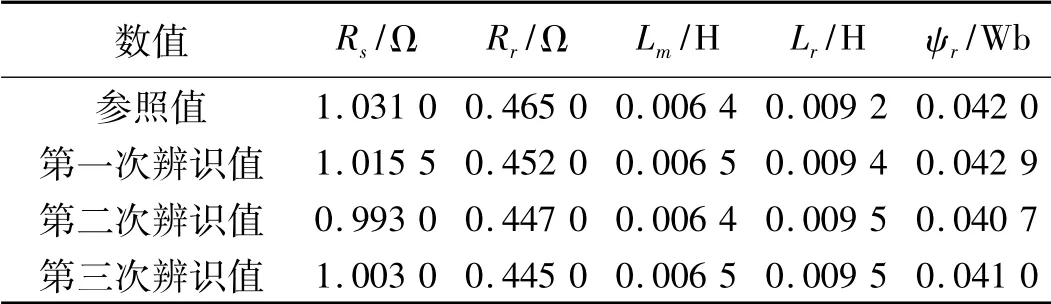
表1 3次辨识结果比较
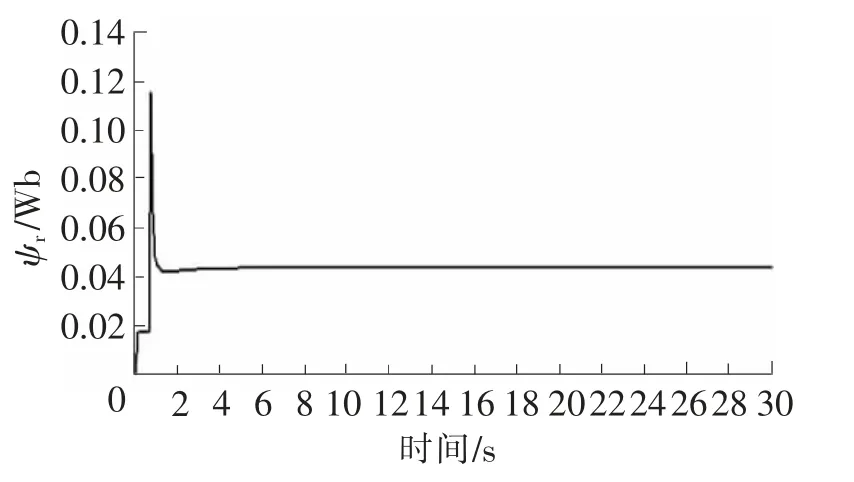
图6 转子磁链辨识曲线
在实验结果中,辨识结果存在着波动,但波动较小。产生波动的原因如下:
(1)采样误差。实验中存在着电磁干扰和噪声的影响,虽然采用了滤波但仍存在不足。滤波器截止频率的选择不合适,对参数辨识结果存在一定的影响,虽然可以通过大量实验选择较为合适的截止频率,但其间的关系还需要进一步研究。另外,由于硬件电路本身也存在误差,也会造成采样不准确,影响参数的辨识。
(2)工况影响。由于辨识出的参数是根据电机运行至稳态下计算得到,此时磁链恒定,经解耦后的电流也恒定,但由于环境的影响,电机的运行状况会受到影响,从而导致电机PI环节对电流进行调整,进而导致电流的变化,造成计算不准确。
本文以转子磁场定向下的同步旋转轴系矢量方程为根据,推导出了可用于递推最小二乘法的线性化电机模型,该模型简单,递推参数收敛速度快。采用二阶巴特沃思滤波器对信号进行数字滤波,并对巴特沃思滤波器的状态方程进行求解,得到了经过滤波后的信号以及信号的一阶导数,无需对导数进行离散化处理,简化了计算,降低了误差,提高了计算精度。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
数学年刊A辑(中文版)(2021年2期)2021-07-17
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
数学大世界·中旬刊(2017年3期)2017-05-14
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
高中生学习·高三版(2016年9期)2016-05-14
