光伏电站运维机器人的结构设计与控制功能优化
2019-03-23 02:27段春艳冯泽君连佳生赖华景辛少权
通信电源技术 2019年2期
段春艳,冯泽君,连佳生,赖华景,辛少权,李 颖
(佛山职业技术学院 电子信息学院 新能源工程系,广东 佛山 528131)
0 引 言
根据国际能源署和国家能源局的统计数据,中国已连续5年成为全球新增装机量第一的国家。随着光伏电站安装量的大幅增加,光伏电站运维问题凸显。
受环境因素影响,光伏电站长期在户外工作,组件表面易出现积灰,影响接收到的太阳辐射量,且组件易受树叶、鸟粪等的遮挡而产生局部热斑效应。热斑位置需专业的检测仪检测,运维困难。目前,光伏电站多为人工运维,清扫效率低,耗水量较大,尤其是西部地区,大型光伏电站较多,长期频繁清洗和用水不便导致运维成本较高。
智能化运维提上日程。机器人是应用研究的热点,如采用光伏电源供电的机器人[1]、面向绿色建筑光伏装置的清洁机器人[2]、全液压驱动光伏板清扫机器人仿真[3]、日本Mirnikikai公司开发的机器人及以色列的太阳能电池板清理系统的EcoppiaE4机器人[4]等。国内市场智能运维产品的智能化清洁机器人只能达到普通的清洁效果,且成本较高,没有得到大面积的推广应用。目前,市场上的清扫机器人未热斑检测功能,常用无人机搭载红外热摄像头进行热斑拍摄,或者人工手持红外热成像仪进行热斑检测。这均需专业人员现场勘测,不能远程监控,不适合大面积光伏电站的运维。
本文设计制作了一款具有自动清扫、自动热斑检测及安全巡检功能的光伏电站运维机器人系统,并优化设计了其机械结构部件和功能实现模块。
1 光伏电站运维机器人系统的机械结构设计
本运维机器人的机械结构部分主要由清扫运行模块和红外热成像、实景检测装置结构组成。
1.1 清扫运行模块结构设计
清扫运行模块由行走装置和清扫装置组成。行走装置控制机器人沿着光伏组件向前行走,清扫装置则在行走中清扫组件灰尘。
行走装置由57HS22步进电机、驱动轮、从动轮、驱动轮轴承、驱动轮轴承座、同步轮组、传动带及接近开关组成,如图1所示。行走装置的动力由57HS22两相步进电机提供。步进电机的动力输出轴与MXL20同步皮带轮连接,动力从MXL20同步皮带轮通过皮带传送到MXL48同步皮带轮。MXL48同步皮带轮和主动轮固定在8 mm的不锈钢轴上,从而将动力传送到驱动轮上。8 mm不锈钢轴的两端固定在628/8轴承上,轴承通过轴承座固定在2020铝型材上,采用M5螺栓连接。从动轮通过8M螺栓与2020铝型材连接。
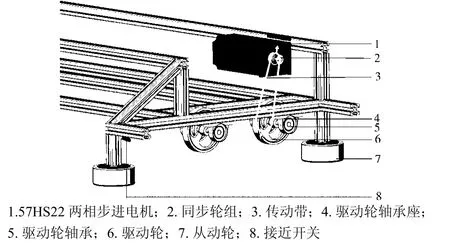
图1 机器人行走装置结构示意图
西门子S7-200 224XP PLC可编程控制器通过Q0.0输出口对雷赛DM542步进电机驱动器进行命令控制。DM542步进电机驱动器输出命令到雷赛57HS22两相步进电机,再通过同步轮组、传动带的传动驱动从动轮开始运动,而从动轮通过支架安装于机器人侧面,卡住光伏组件边框两侧,防止机器人运动时脱落。当接近开关碰到停机位挡板时,将信息反馈至西门子S7-200 224XP PLC可编程控制器。西门子S7-200 224XP PLC可编程控制器输出停止命令或反转命令至雷赛DM542步进电机驱动器,从而实现正反转。
清扫装置由螺旋毛刷及其配套部件组成,主要包括57HS30步进电机、螺旋毛刷、毛刷轴承座、减速轮组及传送带,如图2所示。毛刷全长1 799.8 mm,直径90 mm,毛长25 mm,采用尼龙材料,既可达到清洁效果又不易损失组件。毛刷安装在运维机器人的前端,通过6002轴承座固定在铝型材上。由雷赛57HS30两相步进电机提供动力,动力经过步进电机上的MXL48同步轮带动皮带,而皮带带动毛刷上的MXL20同步轮,从而驱动毛刷进行旋转清洁。本结构中,毛刷的同步轮与毛刷电机的同步轮比值是2.4∶1,以达到减速的效果。
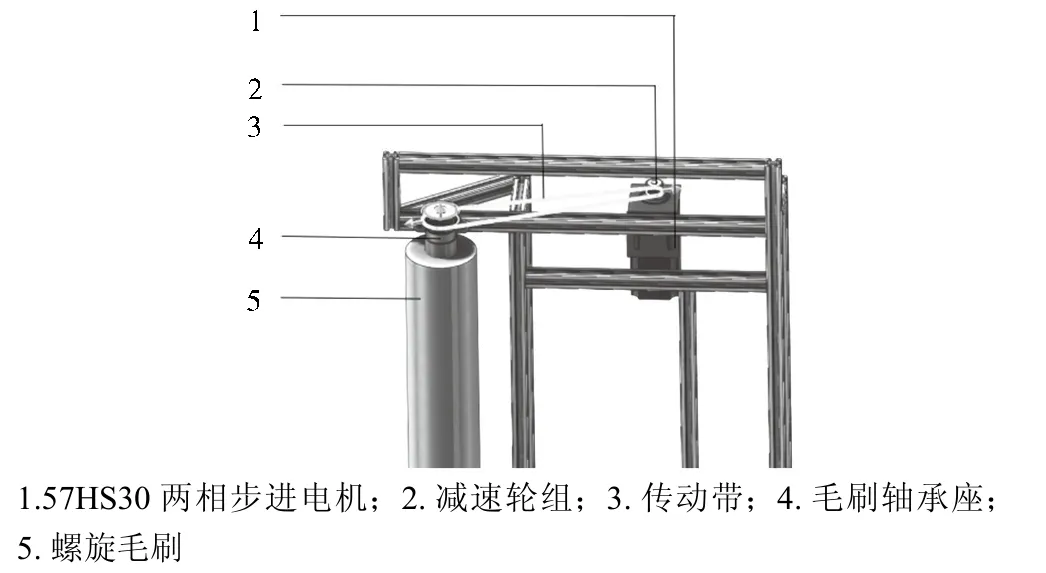
图2 机器人清扫装置结构示意图
西门子S7-200 224XP PLC可编程控制器通过Q0.0输出口对雷赛DM542步进电机驱动器进行脉冲输出控制,通过将两个驱动器的脉冲输入端口并联实现同步运动,然后DM542步进电机驱动器再输出命令至雷赛57HS22两相步进电机。减速轮组和传送带的传动可驱动螺旋毛刷滚动。毛刷的清扫滚动方向与机器人驱动轮运动方向相反,使得驱动螺旋清扫出来的灰尘和垃圾都堆积在机器人运动方向的前方。当机器人清扫至每一排尾端时,灰尘和垃圾将从组件阵列尾端掉落。
考虑到机器人整体结构的稳定性,对驱动轮的轴承座、毛刷的轴承座、关键部位的螺栓进行选型计算,主要针对零件的工况(震动、冲击、高温、低温、高速、低速)进行选型计算。同时,考虑零件尺寸的限制,提高机器人的使用寿命。
1.2 红外热成像、实景监测装置结构设计
本运维机器人将FLIR Lepton V1.3 Thermal Camera与RMONCAM G600实景摄像头结合组成红外热成像、实景监测装置,如图3所示,通过铝型材摆杆、减速箱、直流电机、直流电机驱动器及拍摄减震平台共同配合完成工作。直流电机经过减速箱进行扭矩放大,驱动摆杆运动,摆杆运动范围在180°以内,通过角度传感器进行信息反馈。红外热成像、实景检测装置在未工作时回收到机器人本体,工作时通过摆动回到适合拍摄的角度。红外热成像用于监测、分析光伏组件的热斑效应。
通过拍摄减震平台稳定FLIR Lepton V1.3 Thermal Camera与RMONCAM G600实景摄像头,减小震荡幅度和图像处理算法的难度,使图像处理更精准,热斑检测更高效。
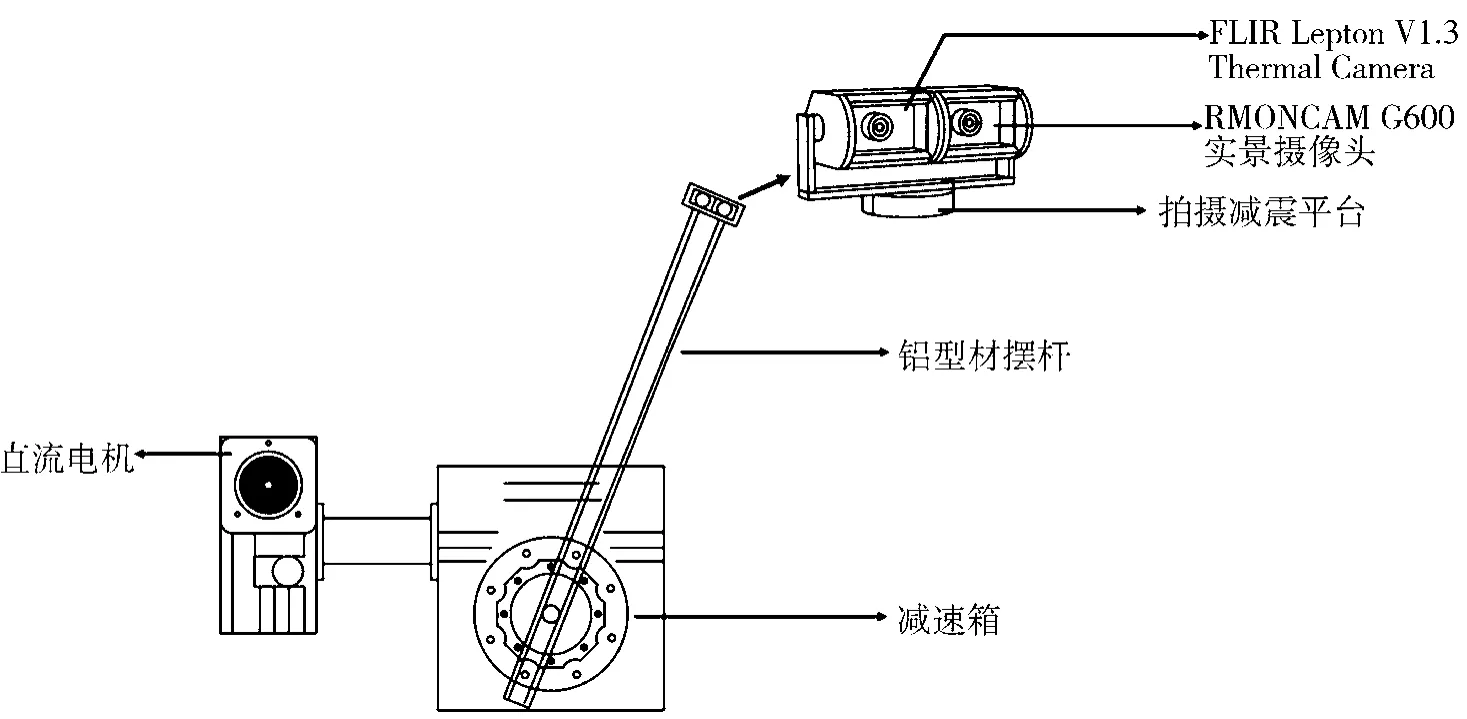
图3 红外热成像、实景检测装置结构示意图
2 光伏电站运维机器人系统控制功能模块设计
2.1 清扫功能模块设计
目前,光伏组件前盖玻璃的自清洁能力较弱。因此,及时清扫光伏组件能有效提高光伏电站的发电量。在区域后台管理中心设定清扫时间(系统默认每天6:00为数据更新时间,为不影响光伏电站发电效率,清扫时间一般设定在18:00-次日6:00),区域后台管理中心在设定的时间发出清扫指令到运维机器人。运维机器人搭载的Fire fl y-RK3399开发板根据当日数据,判断是否启动过雨天清洁,若没有则开始执行清扫任务,否则结束任务执行,如图4所示。日常工作中,若艾飞星创电容式雨量传感器检测到当前雨量大于10 mm,Fire fl y-RK3399开发板将执行雨天清洁任务,否则结束任务执行。
2.2 热斑检测与实景画面采集功能模块设计
光伏组件的热斑检测需要使用的辐射源是稳态太阳模拟器或者自然光源,且其辐射强度不低于700 W/m2。本运维机器人通过太阳能辐射强度传感器采集当前环境自然光源的辐射强度。为采集到更清晰的热斑图像,在Fire fl y-RK3399开发板的LINUX系统中设置太阳能辐射强度阈值为900 W/m2。当前环境自然光源的辐射强度超过阈值,Fire fl y-RK3399开发板会向区域后台管理中心发送“建议开启热斑检测信号”的信息,然后由后台运维管理人员确定是否开启热斑检测。
当运维管理人员开启热斑检测命令时,Fire fl y-RK3399开发板接收到命令,驱动行走装置工作,同时打开FLIR Lepton V1.3 Thermal Camera红外热成像摄像头和RMONCAM G600实景摄像头。FLIR Lepton V1.3 Thermal Camera采集红外热成像照片,RMONCAM G600实景摄像头采集实景图像,并将图像传输到机载Fire fl y-RK3399,如图5所示。后台通过提取相应图像的特征点,识别组件是否存在热斑现象。当组件存在热斑时,RMONCAM G600实景摄像头拍摄组件实景画面。Fire fl y-RK3399开发板将热斑图像与实景画面传输至后台管理中心。后台运维管理人员根据图像判断组件的热斑程度,通过实景画面判断产生热斑效应的原因,并确定问题组件的位置。
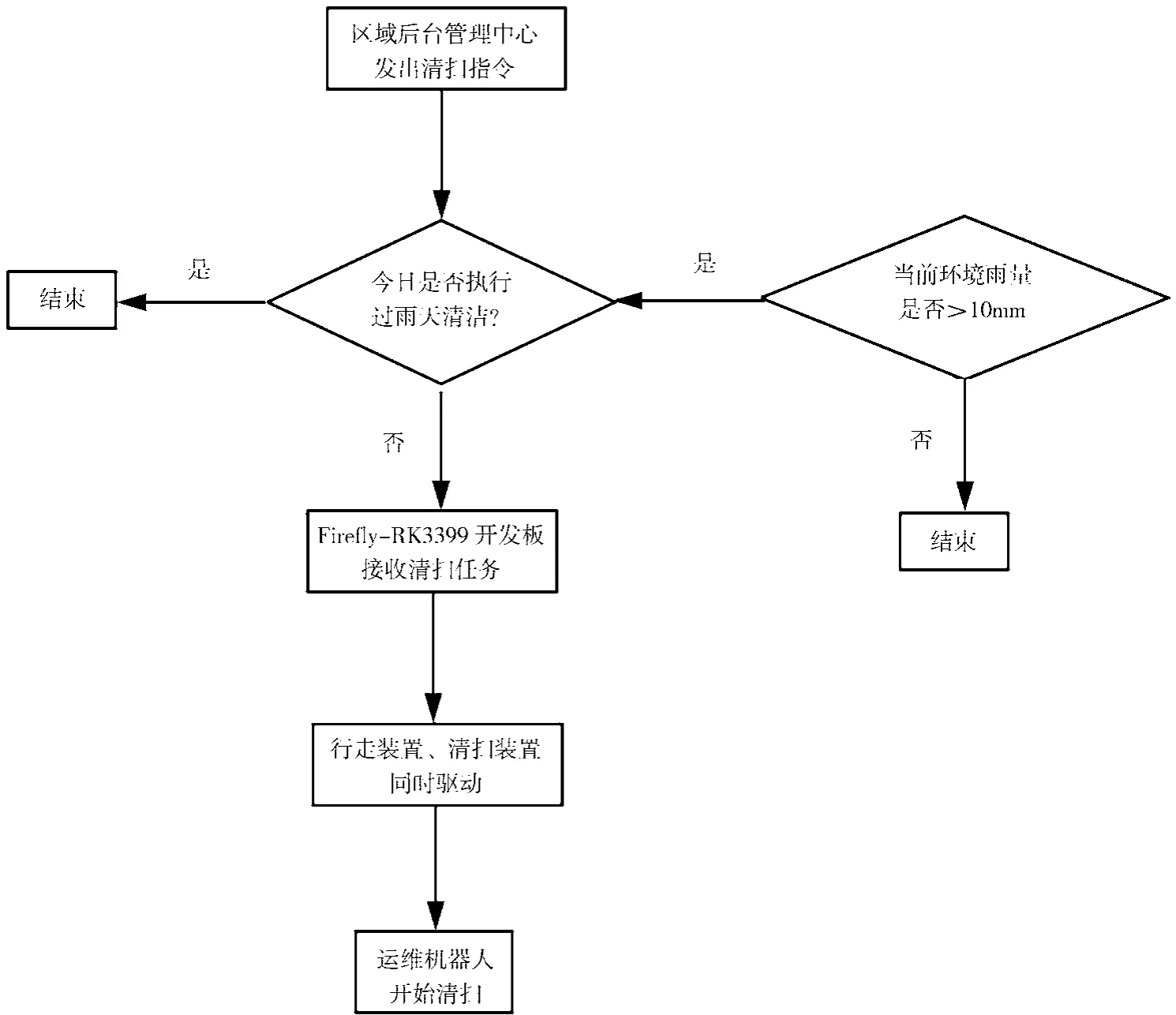
图4 运维机器人执行清扫任务流程图
2.3 运维机器人安全巡检功能实现
大型地面光伏电站一般建设在人烟稀少、环境恶劣的地区,运维管理困难。可视化监控系统的搭建,对于偏远地区的光伏电站十分必要。本文在运维机器人上搭载了RMONCAM G600 实景摄像头。当光伏电站需要安全巡检时,后台管理人员可派出运维机器人启动可视化监控功能,通过调控RMONCAM G600实景摄像头观看光伏电站实景画面,如图6所示。
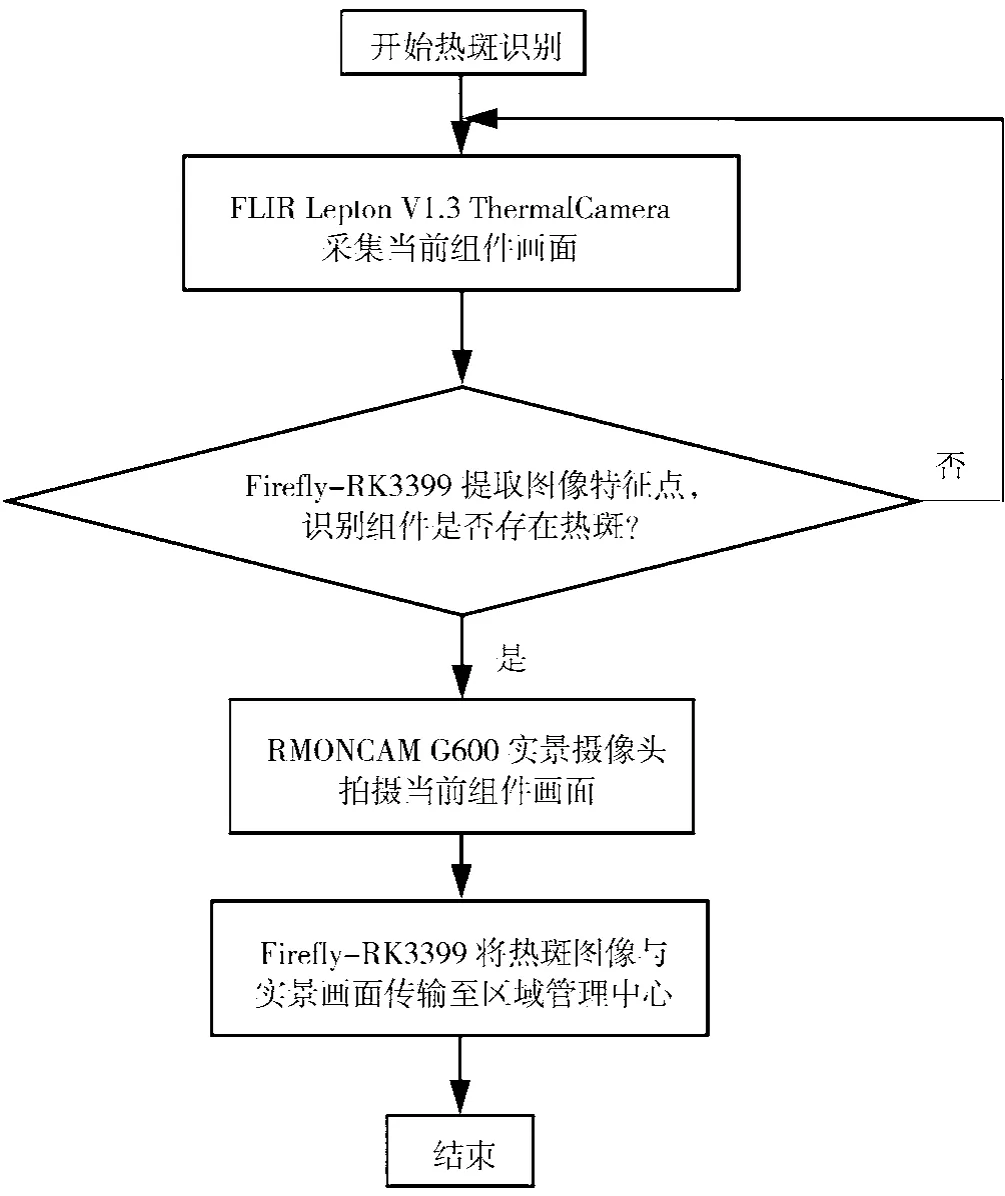
图5 组件热斑识别流程图

图6 安全巡检管理后台显示实景画面
3 光伏电站运维机器人系统应用
在佛山职业技术学院实训b楼顶搭载一套单晶PERC高效太阳能组件发电量对比测试平台,如图7所示。选择两块型号、批次相同的全新PERC组件,比较利用智能运维机器人日清扫一次与不清扫情况下两块组件的发电量差异。
先采集两块PERC组件在相同环境下都不清洗的发电数据,以保证本试验的真实性。调整运维机器人任务程序,使其每日清扫3号组件,而2号组件不清扫用作对比。采集18天的发电量数据,通过分析可更直观地看出光伏组件日清扫一次提升的发电量。表1给出光伏组件是否清扫对发电量数据影响的对比数据,可知清扫后发电量提升明显。图8为工作中的运维机器人状态和运动中采集的热斑检测照片。需要说明的是,提升率是指对比提升的发电量与未清扫组件发电量的比值。

图7 光伏组件发电量测试对比平台

图8 工作中的运维机器人及热斑采集图片示例
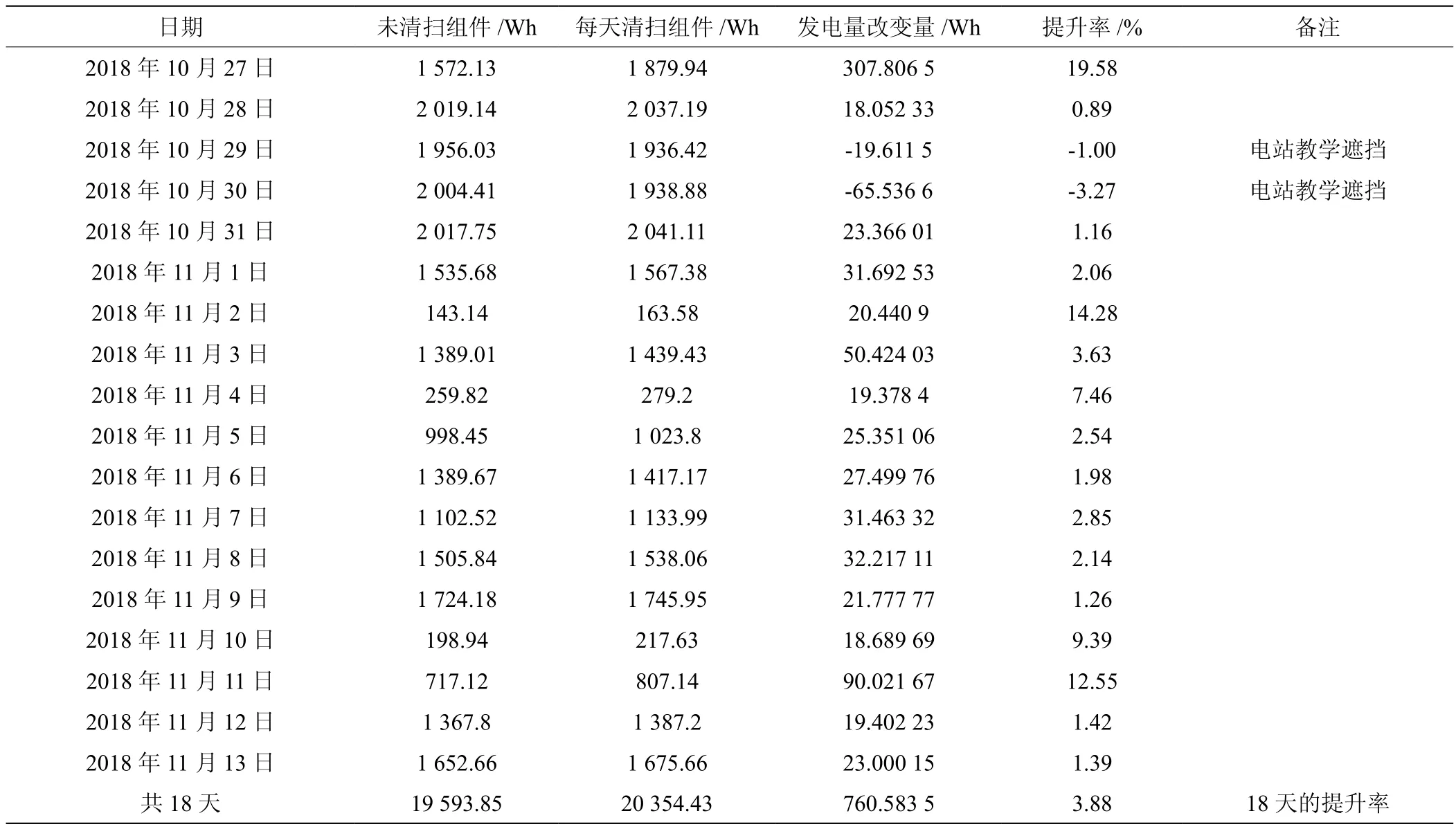
表1 光伏组件是否清扫对发电量数据影响的对比数据
4 结 论
本文设计了一款具有自动清扫、自动热斑检测及安全巡检功能的光伏电站运维机器人系统,并优化设计了主要的机械结构部件和功能实现模块,搭建了户外运行检测平台。通过比较清扫与不清扫组件的发电量数据发现,发电量提升明显,且运维机器人在运行中能自动检测和收集光伏组件红外热成像照片来判断和分析热斑效应,可为智能化光伏电站运维提供支持。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
中学生数理化·中考版(2021年12期)2021-12-31
矿山安全信息(2021年16期)2021-11-29
能源研究与信息(2021年1期)2021-11-15
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
建材发展导向(2019年5期)2019-09-09
经济与管理(2016年2期)2016-12-01