月地高速激光通信系统链路特性分析
2019-03-21 03:17谭立英于思源周远东
深空探测学报 2019年6期
王 淇,马 晶,谭立英,于思源,周远东
(1.哈尔滨工业大学航天学院,哈尔滨 150001;2.哈工大卫星激光通信股份有限公司,哈尔滨 150028)
引 言
随着社会的发展和科技的进步,人类对自然界的认识正在向浩瀚宇宙发展,对自然资源的开发和利用也逐渐向太空发展,因此对深空的探测具有重要的意义[1-3]。光波具有极窄的光束和较短的波长,用光波进行深空信息传输,在同样的数据率下将具有较小的终端体积和质量及功耗等优点,且传输过程中的接收灵敏度高,束宽窄,能够使能量集中,达到很远的传输距离。用光波作为深空探测的信息载体,具有微波波段所没有的优点[4-7]。
卫星光通信技术是近30年来发展起来的空间宽带通信技术。以激光作为信息的载体,信号光束散角极小,可以提供巨大的发射天线增益以适应遥远的通信距离。同时,卫星光通信终端体积小、重量轻、通信容量大,更加适合安装于深空探测器上。可以预见深空探测激光链路的建立将充分的发挥深空探测器上高分辨率、宽视场成像仪的作用的而不受通信数据率的影响,为深空探测技术的发展带来深远的影响[8-12]。
“嫦娥3 号”“嫦娥4 号”着陆器在月面探测方面取得了巨大成功[13]。考虑到深空科学探测及空间资源利用,我国计划在月球建立科学研究站,这将是国际上第1个月球科学工作站,也将是深空科学研究的信息中继中心。因此月地高速激光信息传输需求越来越迫切,急需突破月地激光通信技术,为我国深空探测技术的发展提供支撑。
1 月地高速激光通信链路系统特点分析
根据地球、月球、探月卫星的三体运动特征,针对月地激光链路的建立与保持,分析月球与地球对链路的遮挡问题,对链路模式进行分析。分析了月地激光链路所处的动力学环境,对卫星平台轨道运动、姿态运动等因素对终端瞄准、捕获、跟踪、通信性能的影响进行仿真分析,优化链路系统参数。
分析月球探测卫星与地面站间的相对运动,对卫星光通信终端预瞄准过程进行理论研究,优化预瞄准参数。建立仿真模拟实验系统,进行月地激光通信链路建立与保持仿真实验,对链路模式、链路性能、链路抗干扰能力等进行仿真分析,为深空激光通信系统的研制打下理论基础。以月球极轨卫星(Moon Polar Orbit,MPO)-GEO 为背景,分析实现深空探测星间激光链路技术途径,图1为探月卫星激光通信链路示意图。
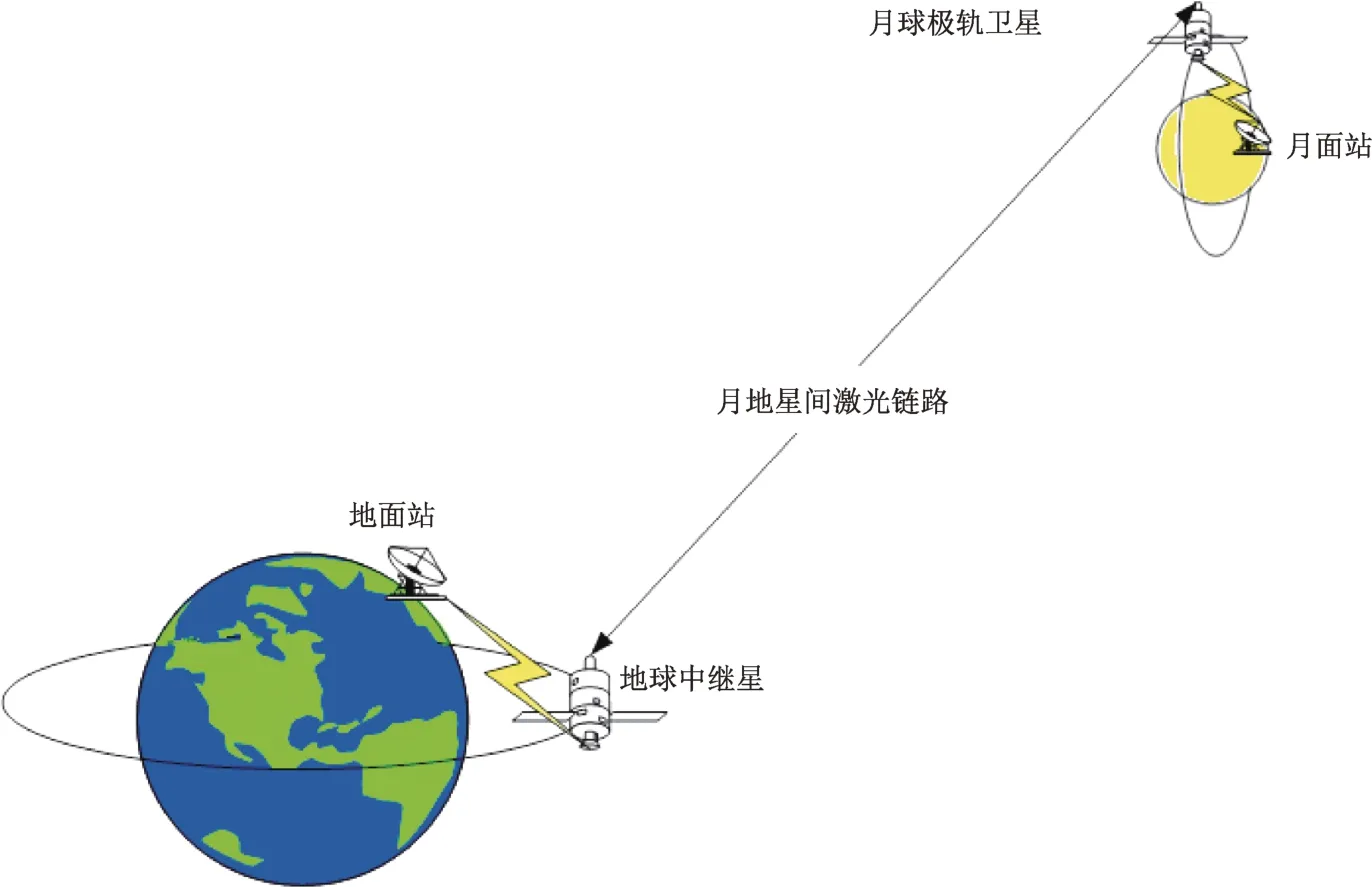
图1 探月卫星激光通信链路示意图Fig.1 Scheme of Lunar exploration satellite laser communication link
月地激光星间链路系统主要由地球中继星终端、月球卫星终端组成。链路的基本形式为:①上行激光星间链路,地球中继星终端利用激光将信号传输到月球卫星终端,信号来源为地面站采用前向微波星地链路系统传输到中继星上的数据信号;②下行激光星间链路,月球卫星终端利用激光将信号传输到地球中继星终端,信号来源为月球探测数据或月面站用微波星月链路系统传输到月球卫星的数据信号。
月地高速激光通信传输链路建立分为3个运行状态:①粗瞄过程,地球中继卫星终端根据星历表计算月球轨道卫星位置,调整粗瞄机构指向月球轨道卫星,月球轨道卫星终端根据星历表计算地球中继卫星位置,调整粗瞄机构指向地球中继卫星;②扫描过程,月球极轨卫星发射信标光,并在不确定范围内扫描,中继卫星终端捕获信标光,同时向月球卫星发射信标光,月球极轨卫星捕获信标光,链路锁定;③跟踪过程,卫星光通信终端利用粗、精瞄机构补偿两星间相对运动、星上振动保持链路稳定。
2 月地激光通信链路轨道分析
月地距离约为38万km,远大于目前已有任何常规通信链路的通信距离,巨大的空间损耗使信号光被衰减到接近探测极限。如果在地面建立接收站,大气损耗将被引入,信号光被进一步衰减。此外大气湍流、闪烁等不确定因素使光通信过程中的跟瞄过程变得更加复杂、困难。因此选择地球卫星作为深空探测光通信节点可以有效地降低深空探测激光通信的难度。
目前常用的地球卫星轨道,包括:①地球同步轨道,常用于通信卫星、气象卫星、导航卫星;②太阳同步轨道,常用于近地遥感卫星;③回归轨道,常用于近地遥感卫星、监测卫星;④冻结轨道,常用于近地遥感卫星。4种轨道中除地球同步轨道外均为近地轨道,且多用于地球遥感、监测。地球同步轨道高度约3.6 万km,运行周期23.96 h,覆盖角半径可达81.3°,在相当大的范围内使用一个中继卫星即可完成全天时的对地通信,运用中继卫星作为深空探测激光通信节点,可将月球卫星传回的信息转发至地面系统。
为消除遥远的通信距离带来的空间传输损耗,安置在地球卫星光通信终端需要较大的接收天线口径,终端所需功耗较大,这就要求卫星平台具有较大的载荷承载能力与输出功率。GEO 卫星平台均为大卫星平台,输出功率可达数千瓦,是深空探测激光通信链路理想的承载平台。
此外,由于激光通信系统信号光束散角极小,要求光束指向精度极高,卫星平台的姿态控制精度将直接影响光通信终端的控制精度。调研国内的卫星平台参数,GEO 卫星平台姿控精度明显好于低轨卫星平台,对于深空探测激光通信系统,GEO 卫星明显优于其它轨道卫星,更加适合卫星光通信。
MPO 可以长期在月球附近工作,进行月球表面绘图,研究月球磁场、引力场,在月球极区寻冰等多种科学活动,是近年来世界各国采用较多的月球探测卫星。例如,1998年1月美国发射的“月球勘探者”卫星便以环月高度为100 km 的月球极地轨道作为运行轨道,探测了月球土壤中微量水的存在。因此本方案也选择月球极地轨道卫星作为通信节点,在MPO和GEO间建立星间激光链路。
在GEO和MPO间建立星间激光链路,由几何关系可知,最远星间距离约为42万km,本方案中通过选取适当的系统参数最大通信距离可达到45 万km,满足链路需要。综上所述,在GEO、MPO 卫星间建立激光通信链路,解决探月活动数据传输问题,在轨道选择上具备可行性。
3 月地激光信息传输链路途径分析
3.1 MPO卫星相对于GEO卫星的角运动
GEO卫星、MPO卫星的运行规律决定了MPO卫星相对于GEO卫星的角运动。在GEO卫星上建立水平俯仰SEZ 坐标系,坐标原点为GEO 卫星质心,基准面为卫星轨道平面,X轴指向地心、Z轴垂直于轨道平面并与卫星角动量矢量平行,如图2 所示。则MPO 卫星相对于GEO 卫星的角运动可以由方位角θh、俯仰角θv的变化表示。
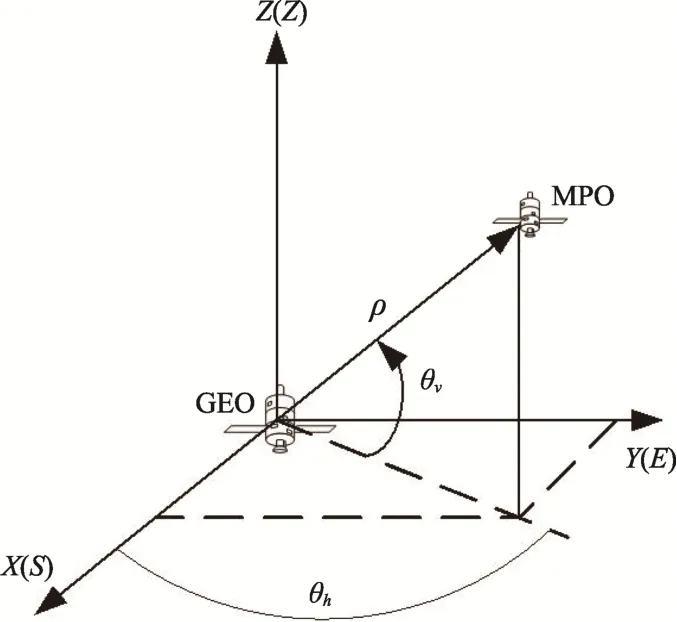
图2 GEO水平俯仰坐标系Fig.2 GEOazimuth pitch coordinate system
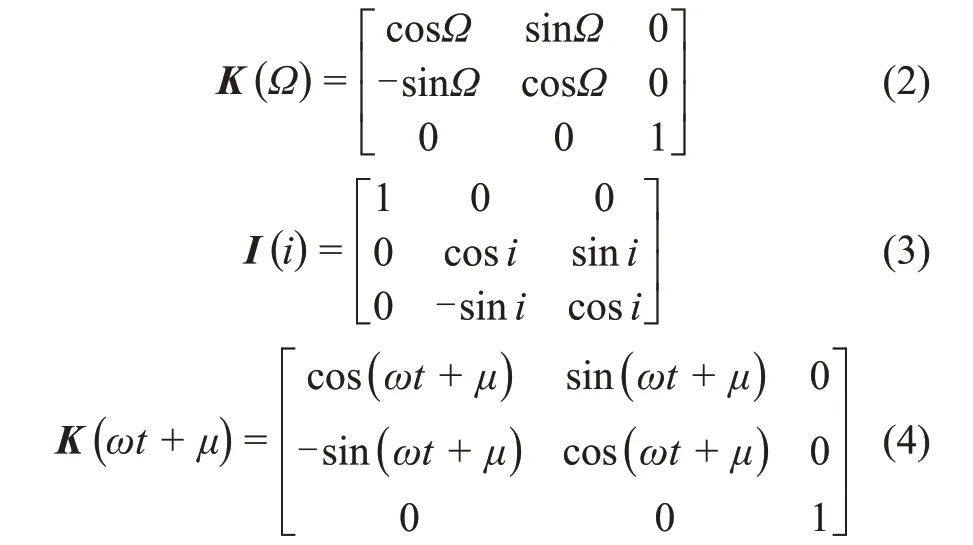
由SEZ坐标系定义可知,地球黄道坐标系与SEZ坐标系的变换矩阵为[14]

其中:

令rs、rE、rZ为在 SEZ 坐标系下的分矢量,则方位角θh、俯仰角θv为
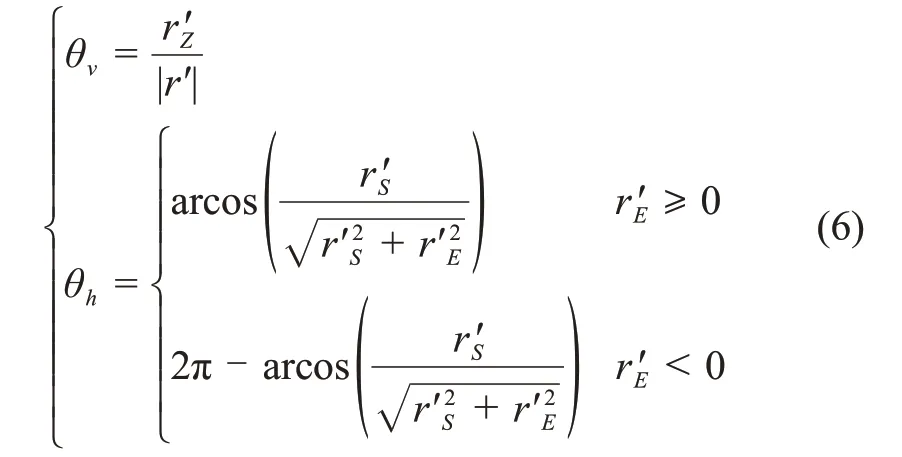
由式(6)可以得到,在一个月的激光链路时间内方位角θh、俯仰角θv变化规律如图3所示。
对方位角θh、俯仰角θv进行求导可以得到方位角、俯仰角角速度变化规律,如图4所示。
由图3 和图4 可知MPO 卫星相对于GEO 卫星方位角和俯仰角变化具有很周期性。θh变化范围0~2π rad,角速度变化范围5.7×10-5~8.6×10-5rad/s。θv变化范围-0.6~0.6 rad,角速度变化范围-2.9×10-6~7.4×10-6rad/s。
MPO 相对于 GEO 的方位角θh、俯仰角θv变化范围及变化率的分析是确定GEO 光通信终端粗瞄机构系统参数的重要依据。
3.2 GEO卫星相对于MPO卫星的角运动
GEO 卫星相对于MPO 卫星的角运动可以由同样方法得到。在MPO 卫星上建立SEZ 坐标系,坐标原点为MPO 卫星质心,基准面为卫星轨道平面,X轴指向月心、Z轴垂直于轨道平面并与卫星角动量矢量平行。图5 为GEO 卫星相对于MPO 卫星SEZ 坐标系方位角θh、俯仰角θv随时间的变化规律。方位角、俯仰角角速度变化规律,如图6所示。
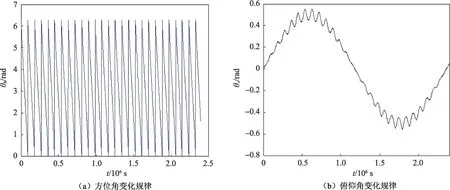
图3 MPO相对于GEO方位角、俯仰角变化规律Fig.3 The varying curve of azimuth and elevation angles for MPO relative to GEO
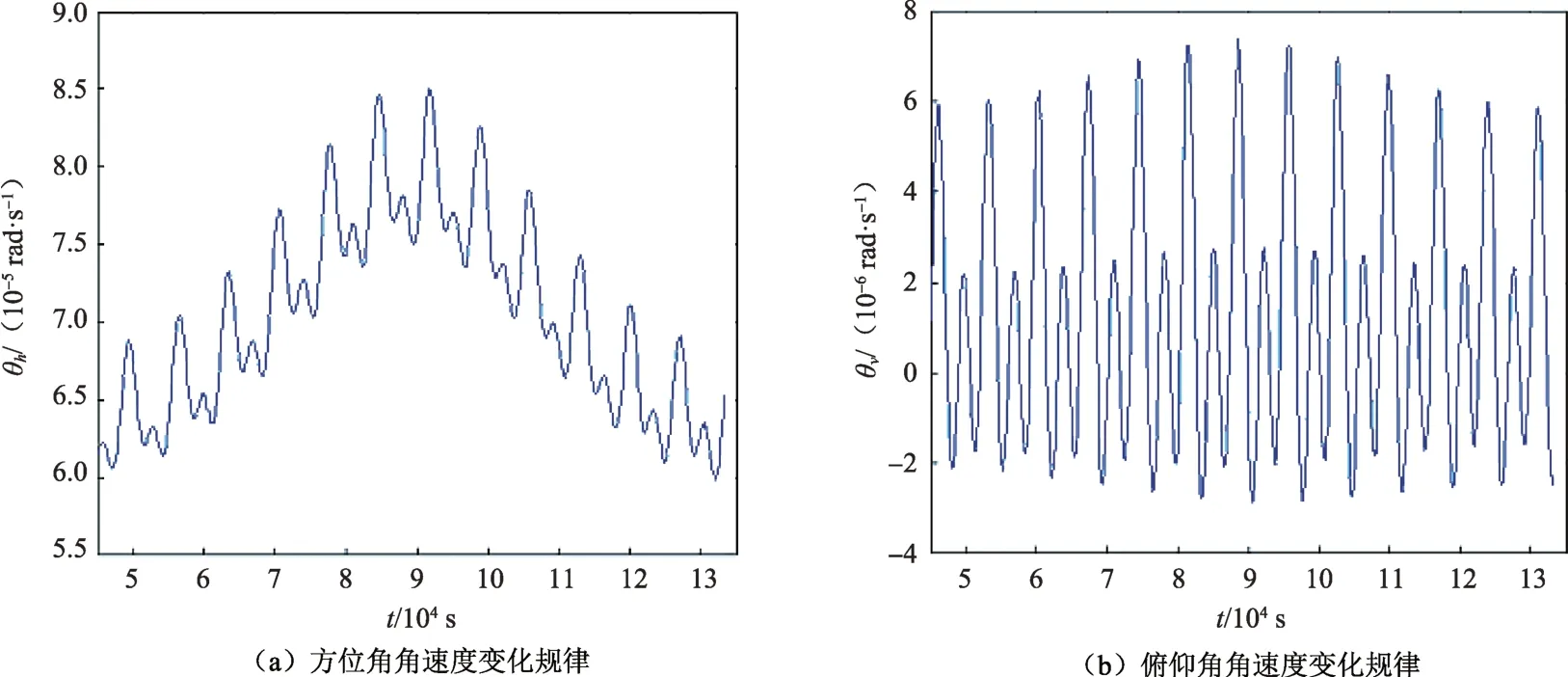
图4 MPO相对于GEO方位角、俯仰角角速度变化规律Fig.4 The varying curve of azimuth and elevation Accelerations for MPO relative to GEO

图5 GEO相对于MPO方位角、俯仰角变化规律Fig.5 The varying curve of azimuth and elevation angles forGEO relative to MPO
由图5和图6知 GEO 卫星相对于 MPO 卫星方位角和俯仰角变化同样具有周期性。方位角θh变化范围0~2π rad,角速度变化范围8.78×10-4~8.94×10-4rad/s。θv变化范围-0.1~0.1 rad,角速度变化范围-3.1×10-5~3.9×10-5rad/s。GEO 相对于MPO 的方位角θh、俯仰角θv变化范围及变化率的分析是确定MPO 光通信终端粗瞄机构系统参数的重要依据。
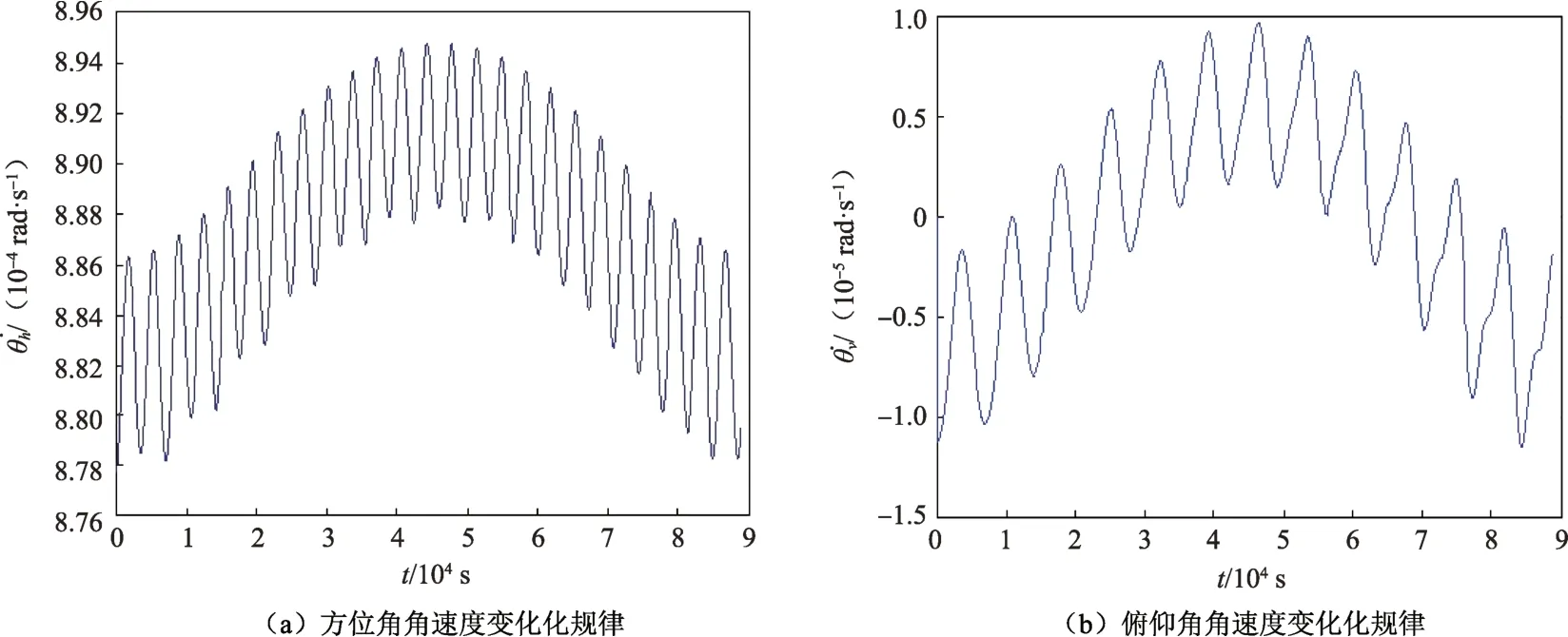
图6 GEO相对于MPO方位角、俯仰角角速度变化规律Fig.6 The varying curve of azimuth and elevation Accelerations forGEO relative to MPO
3.3 GEO与MPO轨道运行规律及月球与地球遮挡问题
GEO 卫星和月球在地心黄道坐标系的坐标,MPO卫星在白道坐标系中的坐标可表示为[15]
其中:n=(G,L,SL),G表示地球同步轨道卫星、L表示月球、SL表示月球极轨卫星;Rn为轨道半径,wn为其角速度,Ωn为其在各自惯性坐标系中升交点的经度;in为其轨道相对于各自惯性坐标系的倾角;un为其初始时刻相对于升交点的夹角。

则月球极轨卫星在地球黄道坐标系中的坐标为[20-21]

月球极轨道卫星和地球同步轨道卫星间的方向矢量表示为

从轨道因素考虑影响激光链路通断的因素主要为地球和月球的遮挡,图7 为地球遮挡链路设意图。
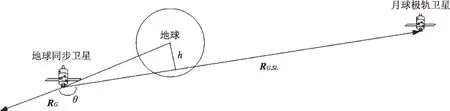
图7 链路受地球遮挡示意图Fig.7 Scheme of occlusion of laser link

知地球遮挡链路的必要条件为

同理可知月球遮挡连路的必要条件为

在进行月地激光通信的过程中,只要链路受到地球或月球的遮挡,通信就被迫终止。
图8 为月-地造成链路通断情况的数值仿真结果。当链路不受月球和地球遮挡,链路通畅时则y=1,否则y=0。仿真时间为1个月。
由图8(a)和图8(b)可知,在地球同步轨道卫星和月球极轨卫星建立激光链路的过程中,链路受月球遮挡比较严重,而受地球遮挡较弱。对图8(c)的分析,可知一个月内该链路的可进行通信的最长时间为52.53 h。
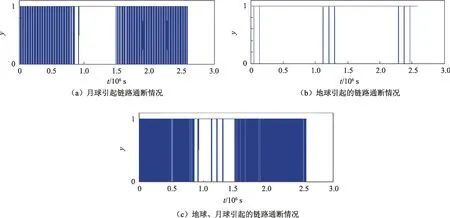
图8 地球、月球对链路的影响Fig.8 Laser link influenced by Earth and Moon
3.4 月球对探月光信息传输遮挡问题解决途径
为了解决链路受月球遮挡的问题,考虑采用多颗月球极轨卫星来提高链路时间。当一颗月球极轨卫星与地球同步卫星的激光星间链路被月球遮挡后,其它的月球极轨卫星可以再次与地球同步卫星建立链路,延长通信时间,如图9所示。
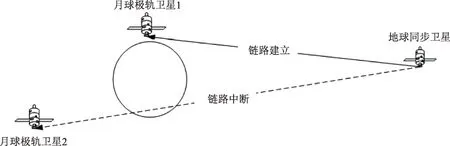
图9 链路的中断与建立Fig.9 Link interruption and establishment
分别针对等相位间隔排列的3颗、4颗MPO卫星和1颗GEO卫星间的链路进行仿真,只要其中1颗极地轨道卫星可与地球同步轨道卫星进行通信,令y=1,否则,y=0。仿真结果如图10~11所示。
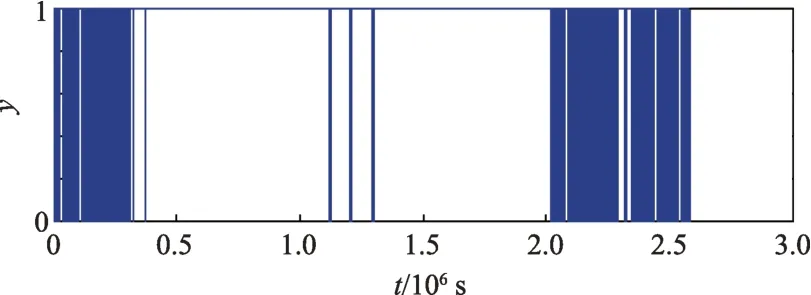
图10 3颗月球极轨卫星对应的链路通断情况Fig.10 Link-to-break condition of three Moon polar orbiting satellites
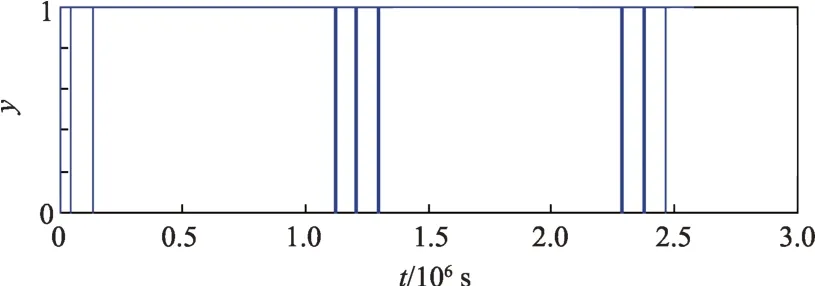
图11 4颗月球极轨卫星对应的链路通断情况Fig.11 Link-to-break condition of four Moon polar orbiting satellites
仿真结果表明:使用3 颗MPO 卫星来进行通信时,链路中断的次数将大大的减少,但是在某一些时间段上,仍然受到月球的遮挡而迫使通信链路频繁中断。使用4 颗MPO 卫星通信时,链路将不再受到月球的阻挡,而仅受到地球的遮挡。同理,增加地球同步轨道卫星的数目可避免地球的遮挡。仿真结果表明,采用两颗GEO 卫星建立链路,链路将不会受到地球的遮挡。
4 结 论
本文根据地球、月球、探月卫星的三体运动,针对月地激光链路的建立与保持,分析了月球与地球对链路的遮挡问题,对链路模式进行分析。仿真结果表明:使用3 颗MPO 卫星来进行通信时,链路中断的次数将大大的减少,但是在某一些时间段上,仍然受到月球的遮挡而迫使通信链路频繁的中断。使用4颗MPO 卫星来进行通信时,链路将不再受到月球的阻挡,而仅受到地球的遮挡。同理,增加地球同步轨道卫星的数目可避免地球的遮挡。仿真结果表明,采用2 颗GEO 卫星建立链路,链路将不会受到地球的遮挡。考虑到深空科学探测及空间资源利用,在月球建立科学研究站,建立深空科学研究的信息中继中心。采用激光通信技术,实现月地高速激光信息传输,为我国深空探测技术的发展提供支撑。
猜你喜欢
结构工程师(2022年2期)2022-07-15
导航定位学报(2022年2期)2022-04-11
移动通信(2021年5期)2021-10-25
空间科学学报(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
中国交通信息化(2014年3期)2014-06-05