汽车转弯限速与道路形态关系仿真研究
2019-03-19 04:40徐磅迤张晋西罗双宝
重庆理工大学学报(自然科学) 2019年2期
徐磅迤,张晋西,罗双宝
(重庆理工大学 机械工程学院, 重庆 400054)
汽车已成为人们日常出行使用最为广泛的交通工具,而对道路交通情况辨认不准确是交通事故安全的最大隐患。全世界每年因道路交通事故而死亡的人数达70万,受伤人数超过500万,道路交通事故累计死亡人数已超过 3 000万[1]。在弯道路段行驶时,驾驶人无法及时观察各种动态,不能获取足够的道路信息,难以对路面情况作出准确判断。这时就需要交通限速为车辆传递警示信息,驾驶员在有速度限制的路段行驶时通常以该速度为依据控制行车速度[2]。
《公共工程技术标准》中给出:道路限速应根据设计速度、运行速度、路测干扰和周围环境等因素来确定[3]。然而当前国内对道路的限制车速制定时缺乏理论支持,常以设计车速作为基本值进行限速,对特殊路段多以20 km/h进行折减[4]。目前国内外公路限速主要有全线限速、特殊点局部限速、分路段限速和可变限速等几种方法[5]。我国高速公路限速值是由各路段管辖部门确定的,主要是在法定限速值和设计速度的基础上,根据车流量、交通事故、沿路地区发展水平进行调整[6]。到目前为止,限速问题尚未有统一的认识和规范化的设计原则,国家标准中也未有此明确规定[7]。随着人们对安全及运行效率要求的提高,对合理限速值的确定提出了质疑和要求。通过采用更为先进的计算机软件SolidWorks,构建设计试验仿真,可大大简化试验流程和减少试验成本。随着软件技术的发展和基础试验数据的积累,未来有望实现更精确的模拟仿真。
本文使用SolidWorks软件对汽车零件进行三维造型和装配,完成后进入Motion添加约束、驱动力、工作阻力等,建立仿真模型[8],对汽车在不同路面形态的行驶过程进行模拟仿真和动力学分析,为制定限速标准提供了一种更为准确、快捷的方法。该研究可避免车辆在转弯过程中因驱动轮过度滑转而降低车辆的附着力,从而有效地提高车辆在弯道行驶的安全性。
1 车辆的三维模型
通过建立汽车转向机构及汽车行驶模型,模拟汽车转向机构的工作过程及汽车在给定驱动、转向关系、道路形态的行驶过程。通过给汽车方向盘加上分段的转向函数,经过梯形机构转化为前轮的转动,用于汽车转向模拟。通过本仿真模型,建立不同形态的路面模型,观察汽车在不同路面模型上的行驶状态[9]。
汽车机械转向系由转向操纵机构、转向器和转向传动机构3部分组成,本文采用的是非独立悬架配用的转向传动机构。汽车转向机构是保证汽车转向行驶时满足特定转向规律的重要机构,对于汽车安全性、操纵稳定性、行驶稳定性及轮胎寿命都有影响[10-14]。转向传动机构是将转向器输出的力和运动传递给转向桥两侧的转向节,使两侧转向轮按一定的关系偏转,保证汽车转向时车轮与地面的相对滑动尽可能小。
为了模拟方便,汽车转向机构简化为如图1所示的机构,由方向盘、梯形机构、转向直拉杆、转向节臂、等腰梯形机构和车轮组成。图2所示为汽车行驶模拟模型,由车身、前轮转向机构、后轮驱动机构组成。通过给车轮和路面建立三维碰撞关系,设置车轮与地面的摩擦,后轮的转动、摩擦力使得汽车行驶。
主要设计参数:两前轮主销中心距B=1 400 mm,汽车轴距L=2 000 mm,转向横拉杆长度为1 300 mm,转向梯形底角γ=70°,转向直拉杆长度为600 mm,转向节臂长度为350 mm,车轮外径D=700 mm。
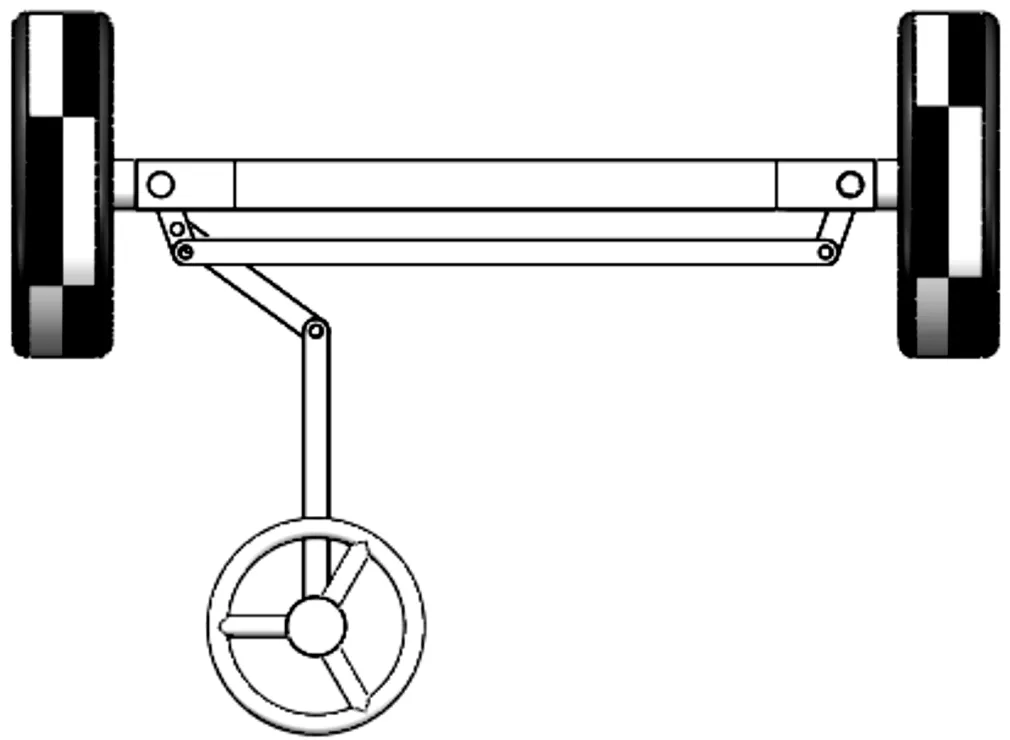
图1 汽车转向机构简图
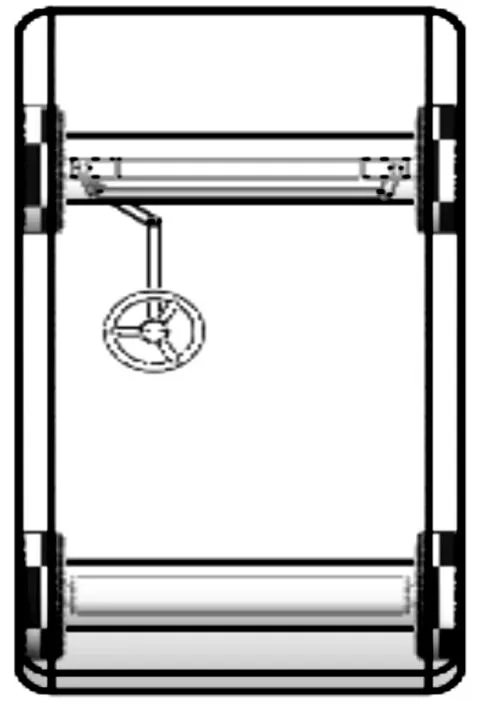
图2 带转向机构的汽车模型
1.1 车辆在斜面弯道行驶状况分析
车辆在进入斜面弯道行驶时,通常处于减速行驶状态。由于车辆受到离心力的作用,当速度过快时,车辆极易出现侧滑甚至侧翻等危险情况,考虑汽车制动时的方向稳定性,往往在汽车进入弯道前,驾驶员就需要提前进行制动减速。在转弯行驶时,车辆速度较低,因此滚动阻力和空气阻力可以忽略不计。
1.2 三维模型建模
以路面倾角ψ、弯道半径R进行三维建模。汽车库设计最大坡度约为15%(8°),因此拟定弯道倾角ψ分别为6.5°、8°、9.5°。弯道外圈半径R按城市主干道设为38 m,平原公路最小半径为108 m,山区公路最小半径为256 m,建模时弯道角度均为22.5°。路面三维模型如图3所示,其具体参数取值如表1、2所示
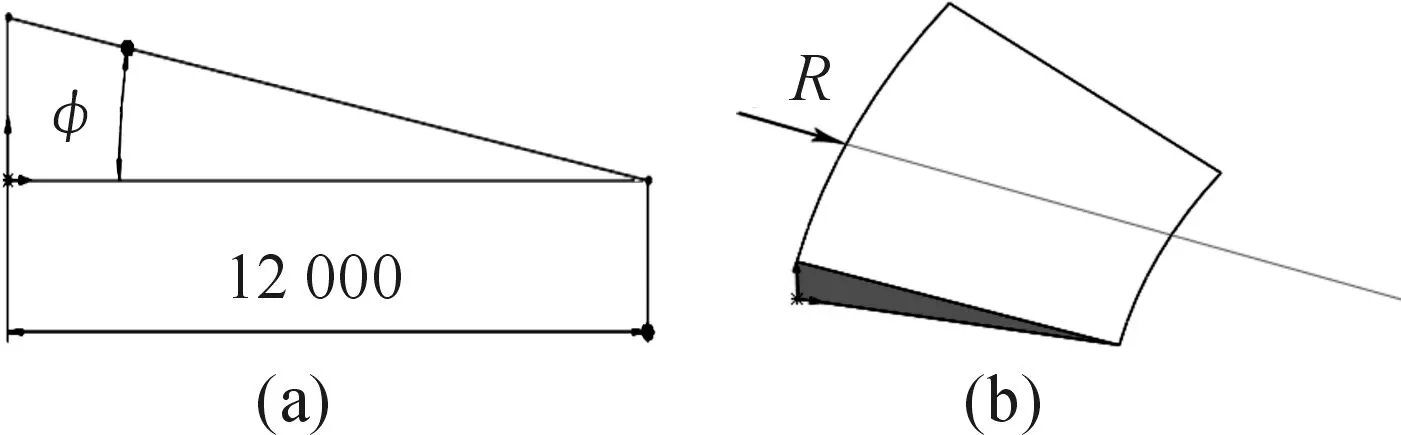
图3 路面三维模型


表2 弯道半径参数取值 m
2 转弯安全性仿真检测
车辆进入平曲线路段行驶时,通常处于减速行驶状态,车辆受到离心力作用等原因极易出现侧滑、失去转向功能甚至侧翻等现象。将小车分别与不同弯道倾角和弯道半径的路面进行装配,为后轮添加不同转速的马达,对汽车行驶路径与线速度位移进行比较。通过对检测数据进行分析判断车轮与地面是否打滑。
2.1 建立仿真模型与三维碰撞关系
将地面设置为固定零部件,其余设置为运动零部件,在后轮的旋转副添加运动,设置两后轮为驱动轮。仿真模型如图4~ 6所示。
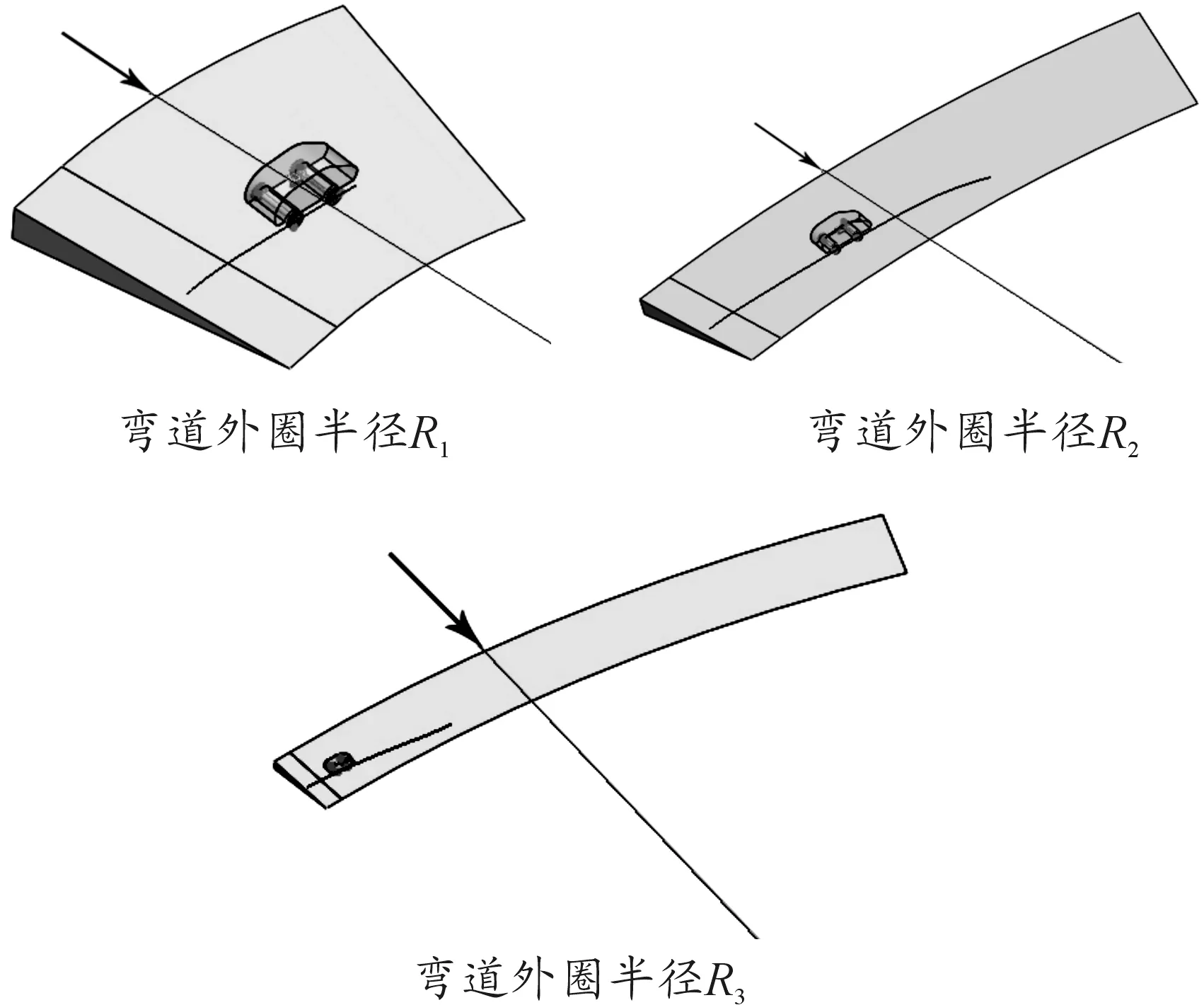
图4 路面倾角ψ1仿真模型
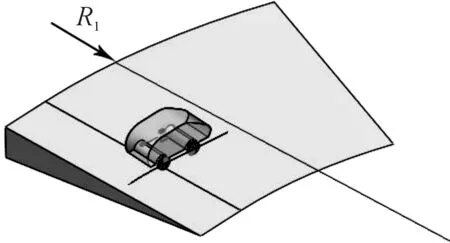
图5 路面倾角ψ2、半径R1仿真模型
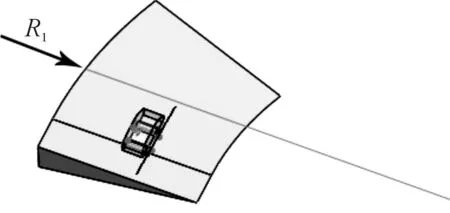
图6 路面倾角ψ3、半径R1仿真模型
将弯道半径分别设置为R2、R3,建立出路面倾角ψ2、弯道半径R2与路面倾角ψ2、弯道半径R3的仿真模型。
将弯道半径分别设置为R2、R3,分别建立出路面倾角ψ3、弯道半径R2与路面倾角ψ3、弯道半径R3的仿真模型。
行驶设置的要点是将4个车轮和地面设置为3D碰撞关系。通过给车轮和路面之间建立三维碰撞关系,设置车轮与地面的摩擦,摩擦力使得汽车行驶。
将地面设置为固定零件,其余零件设定为浮动零件,在后轮的旋转副添加1个运动,设置2后轮为驱动轮。将4个车轮和地面之间设定为3D碰撞关系。碰撞参数设置为:碰撞刚度 100 000 N/mm,非线性刚度力指数2.2,接触边界的穿透深度0.1 mm。为使车轮与地面的相对运动。必须对车轮与地面的摩擦因数进行设定:静摩擦临界速度取0.1 mm/s,静摩擦临界因数0.4,动摩擦临界速度取10 mm/s,动摩擦因数取0.3,仿真时间设置为11 s。
2.2 方向盘转动函数设置
为方向盘添加一逆时针旋转马达,马达位置为方向盘旋转轴,马达的运动方式选择表达式如式(1)所示。
STEP(Time,0,0D,2,-10D)+
STEP(Time,2,-10D,4,5D)+
STEP(Time,8,-5D,10,-25D)
(1)
式(1)函数意义为:0~2 s为顺时针转动10°;2~4 s为逆时针转动15°;8~10 s内为顺时针转动20°。
2.3 汽车仿真模型侧滑及侧翻判定
行驶的汽车因转向操作不当,速度过快,使惯性离心力增大,极易引发车轮侧滑。当横向加速度过大,导致一边的车轮与地面摩擦力为0时,甚至会发生侧翻现象。将仿真模型中的车辆后轮转速进行逐级增加,在SolidWorks中仿真模拟计算完毕后,测量车辆后轮行驶路径的弧长,将该弧长与车辆后轮的线速度-时间图像计算得出的位移进行比较,若是行驶路径的弧长大于通过线速度-时间图像计算得出的位移,则该汽车出现侧滑现象,以该速度行驶时无法保证汽车安全通过该弯道。出现该情况时,观察路面与车轮接触情况,若有一边车轮已经与路面脱离接触,则发生侧翻。若两者近似相等,则认为以该速度行驶时能够安全通过该弯道。
2.4 仿真结果分析
将汽车后轮的初始转速设为85 r/min,置于弯道倾角为9.5°、弯道半径100 m的路面。该仿真路段路面平整度良好,路面无其他障碍物,除该模型外,无其他汽车仿真模型在此路段仿真,对其造成干扰,且无横风、路面积水等自然因素影响汽车与路面的摩擦力。
仿真时间与速度图像的关系如图7所示。
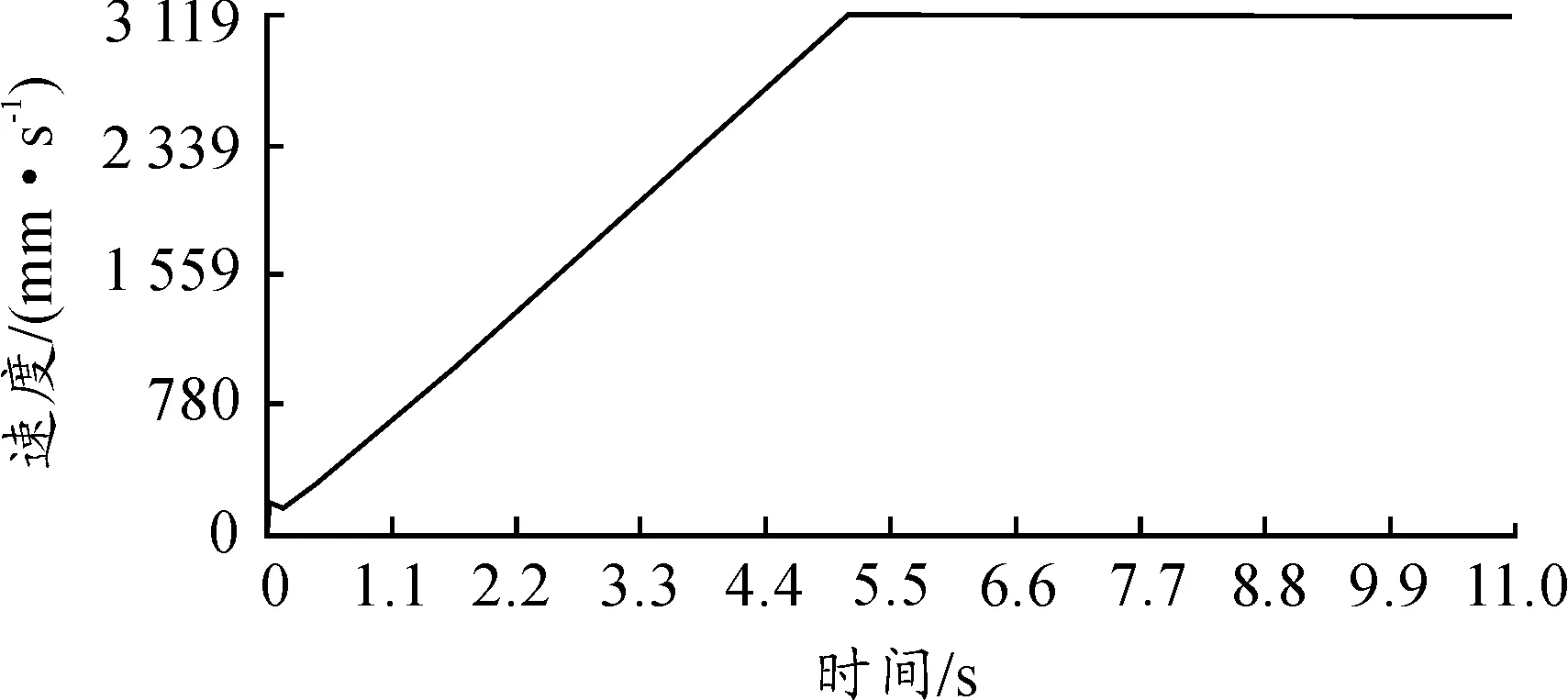
图7 速度-时间图像仿真结果
计算该图像可知位移为26 355.55 mm,而通过行驶路径测出的弧长为26 200 mm,所以当后轮转速为85 r/min时并未出现侧滑现象。将该转速逐级递增,直至转速达到95 r/min时,车轮位移为 26 750 mm,而行驶路径测量得出的位移为 26 918.17 mm,因此95 r/min为该仿真条件下的马达临界转速,换算成车辆行驶速度为13 km/h。观察车轮与地面接触情况,如图8、9所示,在0~2.6 s内车辆行驶于地面1,接触力不为0;2.6~11 s内车辆行驶与地面2,接触力同样不为0,所以该行驶过程中并未发生侧翻现象。
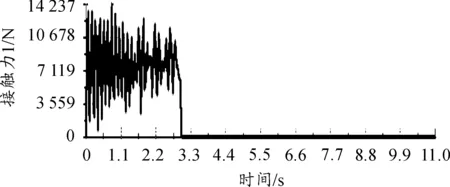
图8 车轮-地面1接触力

图9 车轮-地面2接触力
在相同的仿真条件下用该种方法对弯道半径R1、路面倾角ψ1,弯道半径R2、路面倾角ψ1,弯道半径R3、路面倾角ψ1,弯道半径R1、路面倾角ψ2,弯道半径R2、路面倾角ψ2,弯道半径R3、路面倾角ψ2,弯道半径R1、路面倾角ψ3,弯道半径R2、路面倾角ψ3,弯道半径R3、路面倾角ψ3这9种道路条件下分别进行仿真并得出其侧滑临界值,如表3~5所示。

表3 路面倾角ψ1时的临界速度

表4 路面倾角ψ2时的临界速度

表5 路面倾角ψ3时的临界速度
根据表3~5信息对比可知:当弯道半径相同时,路面倾角越大,发生侧滑时的临界速度越大,因此可以适当增大路面倾角,减少车辆轮胎的磨损,降低车辆发生侧滑的可能,避免车辆在进入弯道前大幅度减速产生的危险;当路面倾角相同时,弯道半径越小侧滑临界速度越小,所以在城市道路中行驶时,速度不宜过快,城市道路的弯道半径通常较小,如果车速过快,驶入弯道前需要大幅度减速,极易发生追尾事故;而在高速公路行驶时,车辆速度通常较快,为了避免车辆侧滑,所以高速公路的弯道半径通常较大。
3 结束语
本文通过三维软件SolidWorks建立了汽车转弯仿真模型,模拟汽车在斜面弯道转向的运动过程,通过给轮胎和地面添加三维碰撞接触和摩擦,实现车轮滚动带动汽车行驶、显示行驶轨迹、观察车辆运动状态。仿真计算结果的图像很好地显示了汽车在斜坡转弯时启动、转向的过程。通过该软件的计算分析,得出了不同路面倾角与不同弯道半径侧滑的临界速度。比较可知,侧滑临界速度随着弯道半径和路面倾角的增加而增加对应数值,为更科学地制定汽车在通过不同路面倾角和弯道半径道路的限速标准提供参考。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
小读者(2019年24期)2020-01-19
小学生学习指导·爆笑校园(2019年6期)2019-09-10
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
发明与创新·中学生(2016年7期)2016-05-14
红蜻蜓·低年级(2015年11期)2016-02-02