
一种基于互谱法的鱼雷末弹道定位方法
2019-03-15 01:34朱元林刘松海
水下无人系统学报 2019年1期
朱 峰, 朱元林, 刘松海
一种基于互谱法的鱼雷末弹道定位方法
朱 峰, 朱元林, 刘松海
(中国人民解放军91388部队, 广东 湛江, 524022)
为提高攻潜鱼雷末弹道测量系统的被动定位精度, 文中提出了一种基于短时互谱法的攻潜鱼雷末弹道被动定位方法, 介绍了运用该方法建立的测量系统, 给出了目标的被动定位算法, 在测量区域内对测角精度、噪声影响以及典型轨迹进行仿真分析。仿真结果表明, 在信噪比为10 dB的条件下, 采用文中的定位方法, 当目标位于距测量子阵80 m, 角度为±40°区域内的弧线上, 测向精度提高0.15°, 典型航迹绝对误差普遍减小0.4 m。文中所做研究可为考核鱼雷效能评估提供参考。
鱼雷; 末弹道; 互谱法; 被动定位
0 引言
在以往的鱼雷定型试验中, 需要在鱼雷上加装合作信标, 以实现对鱼雷末弹道轨迹的测量。但由于合作信标的存在, 改变了鱼雷原有的长度、重心等重要指标, 无法充分考核其作战效能。利用被动定位方法能有效解决该问题[1-3]。
现有的被动定位方法利用常规波束形成确定鱼雷航行噪声最大方向, 常采用方位法对目标进行定位。由于实时显示的要求, 该方法定位精度不高。基于此, 文中提出一种基于短时互谱法的鱼雷末弹道被动定位方法, 该方法采用先粗估、再细估, 利用分裂波束提高攻潜鱼雷试验中末弹道测量系统的被动定位精度。
1 艇载测量系统
4个测量子阵分别位于潜艇左右两舷排水孔处, 对称放置, 子阵间距60 m。每个测量子阵内部包含16元水听器, 用于接收鱼雷辐射噪声。每个子阵可以确定目标方向, 2个子阵能够定位目标位置。测量子阵内部构造及测量安装图如图1和图2所示。
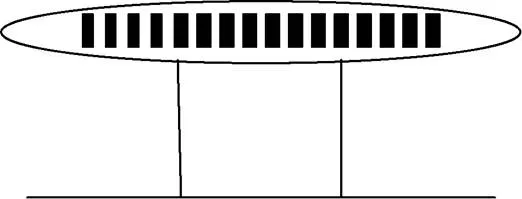
图1 测量子阵内部构造示意图
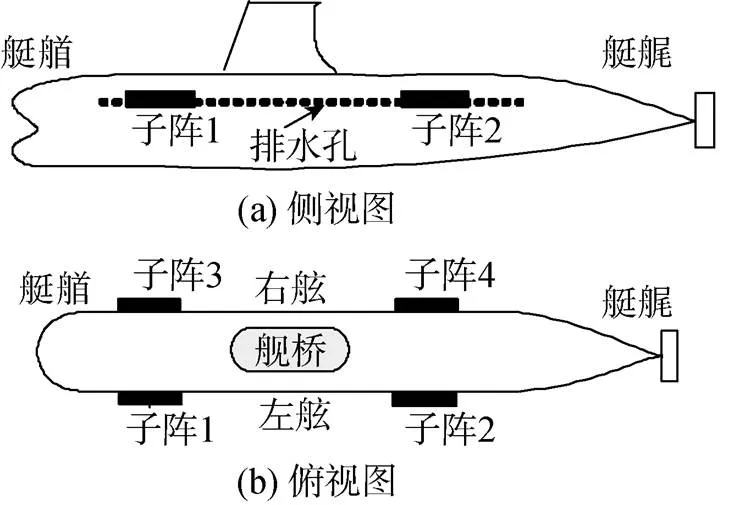
图2 测量子阵安装示意图
2 定位算法
2.1 系统算法流程
该系统先采用常规波束形成确定能量最大方向, 搜索步长5º。以能量最大方向为中心, 前后5º为搜索范围, 利用常规波束形成进行细化搜索, 再次确定能量最大方向, 搜索步长1º。将单个子阵拆分成两部分, 一侧8个阵元为一组, 插入能量最大方向, 进行分裂波束形成。利用短时互谱法对目标方向进行精确估计[4-6]。其算法流程如图3所示。
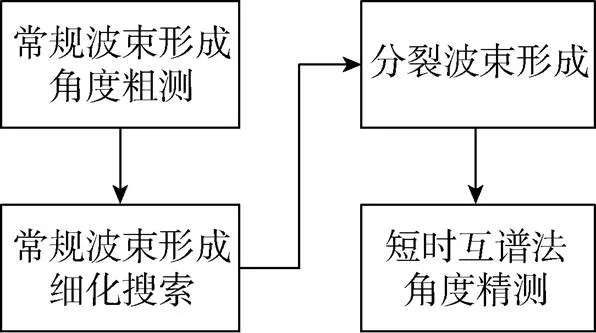
图3 算法流程图
2.2 短时互谱法理论推导
短时互谱法用于分裂波束形成后。当目标大于7.5 m满足远场条件时, 接收信号近似于远场平面波[7]。其态势图如图4所示。
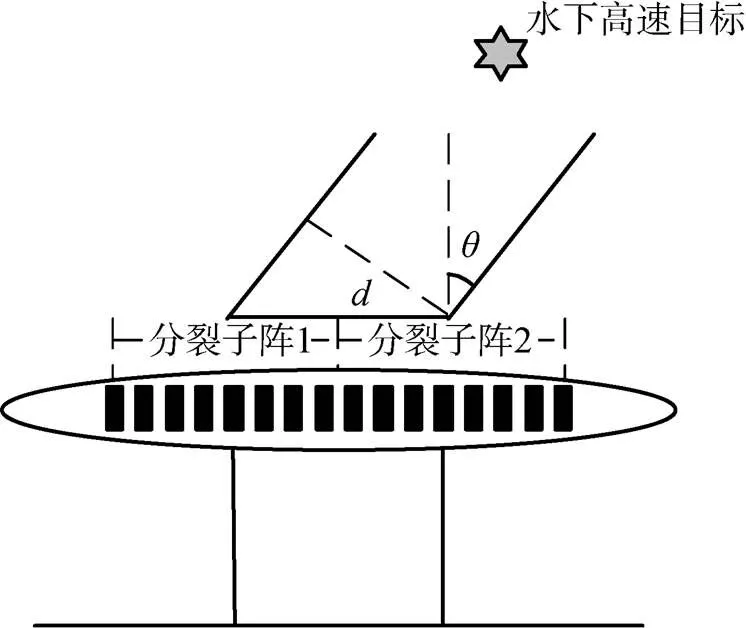
图4 互谱法测量态势图


3 仿真分析
3.1 单个子阵测角精度
子阵内包括16个阵元, 间隔0.05 m。定义子阵中心法线方向为0º, 左侧为负, 右侧为正。水下目标在距子阵中心80 m, 角度范围为-80º~80º的弧线上均匀分布, 随机出现30 000次。信号为2~15 kdB宽带噪声, 加入2~15 kdB的高斯限带白噪声, 信噪比为10 dB。统计测量区域内测量角度绝对误差如图5所示。
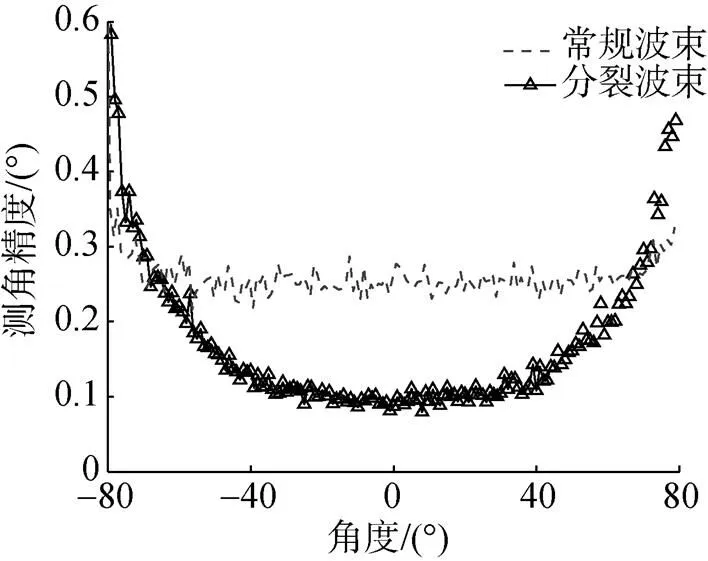
图5 单个子阵测角精度
由图5可以看出, 当水下目标位于距子阵中心80 m, 角度为–40º~40º的弧线时, 测角精度绝对误差在0.1º附近, 比传统方法提高0.15º。在其他测量区域内, 测角精度绝对误差普遍小于0.3º。
3.2 信噪比对短时互谱法的影响
水下目标位于距子阵中心80 m, 角度为–40º~40º的弧线均匀分布, 随机出现200次。加入2~15 kdB的高斯限带白噪声, 改变信噪比, 统计该区域内测量角度绝对误差。
如图6所示, 当信噪比大于10 dB时, 使用此方法测角误差小于0.05º。当信噪比大于5 dB, 测角误差小于0.15º。在信噪比较高的条件下, 该方法测角精度提高明显。
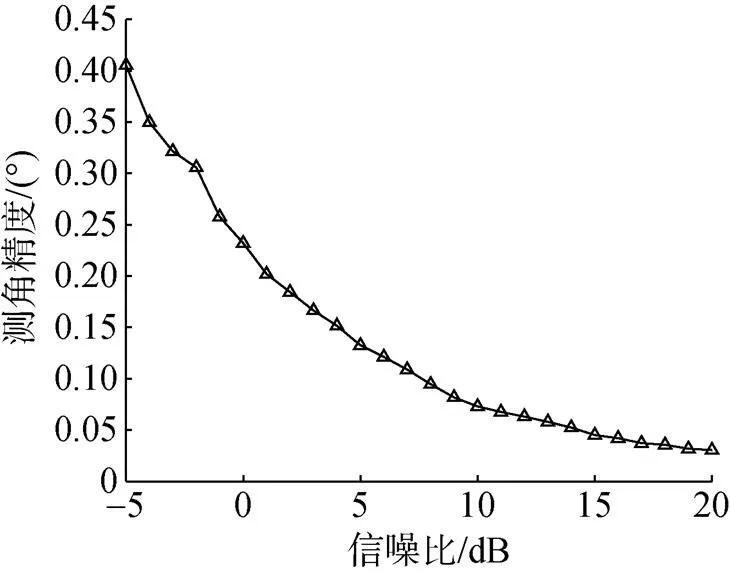
图6 信噪比与测角精度关系图
3.3 典型轨迹精度
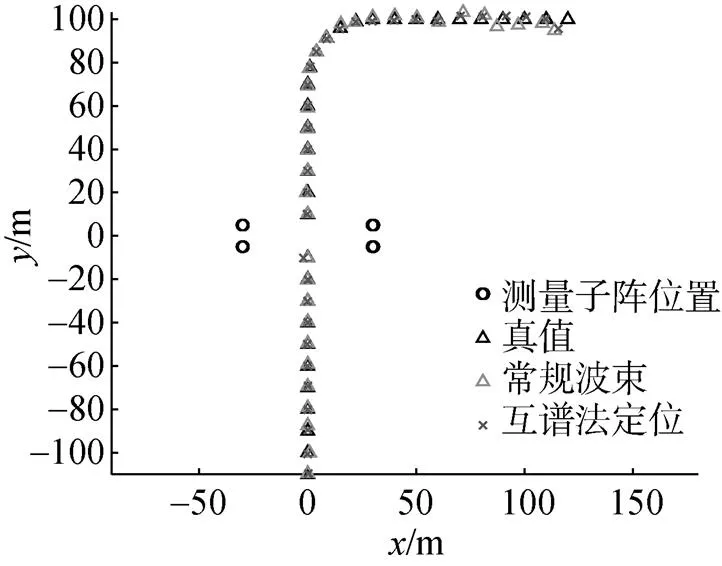
图7 典型轨迹测量比较图
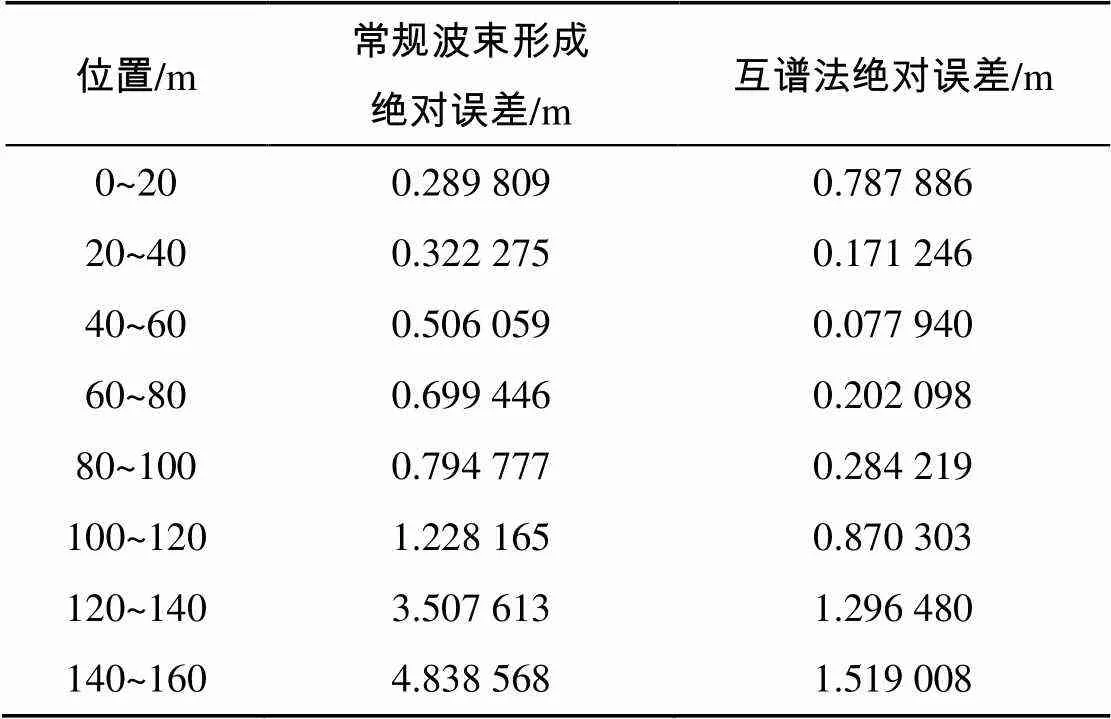
表1 典型轨迹绝对误差统计表
4 结束语
文中介绍了艇载末弹道被动测量系统, 给出了基于短时互谱法的鱼雷末弹道被动定位方法, 并对测角精度、信噪比影响及典型轨迹进行仿真分析。仿真表明, 使用该方法在目标位于距子阵中心80 m, 角度为–40º~40º的弧线时, 比传统方法的测角精度提高了0.15º, 在典型轨迹中, 测量绝对误差普遍减小了0.4 m。文中讨论的方法用于算法验证性仿真, 但实际声场环境十分复杂, 下一步将重点结合数据对算法做进一步调整。
[1] 刘松海, 孙向前, 岳剑平. 智能鱼雷攻潜部位及攻击角测量方法与误差分析[J]. 舰船科学技术, 2012, 34(4): 79-88.Liu Song-hai, Sun Xiang-qian, Yue Jian-ping. The Measuring Method and Error Analysis of Intelligent Torpedo’s Attack Point and Attack Angle of Submarine Target[J]. Ship Science And Technology, 2012, 34(4): 79-88.
[2] 李伟, 徐文焱, 邓鹏. 反潜导弹空中末弹道及入水控制问题研究[J]. 舰船科学技术, 2012, 34(12): 82-87.Li Wei, Xu Wen-yan, Deng Peng. At the End of the Air Antisubmarine Missile Trajectory and the Control of Water[J]. Ship Science and Technology, 2012, 34(12) : 82-87.
[3] 杨志权, 刘松海, 王文学. 鱼雷实艇靶末弹道测量算法分析与误差仿真[J]. 鱼雷技术, 2003, 11(4): 34-38.
[4] 陈春玉. 尺度目标识别中的若干技术问题[J]. 鱼雷技术, 2003, 11(3): 9-13.
[5] 马国强, 徐德民, 王新晓. 基于目标方位走向的水下目标尺度识别技术研究仿真[J]. 舰船科学技术, 2004, 26(3): 39-42.Ma Guo-qiang, Xu De-min, Wang Xin-xiao. A Study of Simulation for Underwater Target Scale Identification with the Technique of Target Azimuth Tendency[J]. Ship Science and Technology, 2004, 26(3): 39-42.
[6] 李晋, 王晓庆, 陈卫东. 基于常规波束合成的分裂阵互谱定向研究[J]. 无线电工程, 2016, 46(2): 36-40, 47.Li Jin, Wang Xiao-qing, Chen Wei-dong. Research on Cross Spectrum Direction-finding with Splitting Beam Based on Conventional Beam-forming[J]. Radio Engineering, 2016, 46(2): 36-40, 47.
[7] 朱峰, 刘松海, 苏军. 一种火箭助飞鱼雷攻潜末弹道被动定位方法[J]. 水下无人系统学报, 2018, 26(1): 85-88.Zhu Feng, Liu Song-hai, Su Jun. A Passive Positioning Method of Attacking Submarine Terminal Trajectory of Rocket-assisted Torpedo[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 85-88.
[8] 刘朝晖, 付战平, 王明洲. 基于方位走向法和互谱法的水中目标识别[J]. 兵工学报, 2006, 27(5): 932- 935.Liu Zhao-hui, Fu Zhan-ping, Wang Ming-zhou. Underwater Target Identification Based on the Methods of Bearing and Cross-spectrum[J]. Acta ArmamentarII, 2006, 27(5): 932-935.
[9] 李启虎. 进入21世纪的声纳技术[J]. 信号处理, 2012, 28(1): 1-11.Li Qi-hu. Sonar Technology in Entering 21 Century[J]. Signal Processing, 2012, 28(1): 1-11.
[10] 易红, 周殿宝, 陈春玉. 声自导鱼雷进行尺度目标识别的试验方法研究[J]. 鱼雷技术, 2005, 13(4): 50-53.Yi Hong, Zhou Dian-bao, Chen Chun-yu. A Test Method for Scaling Target Recognition of Acoustic Homing Torpedo[J]. Torpedo Technology, 2005, 13(4): 50-53.
A Location Method of Torpedo Terminal Trajectory Based on Cross Spectrum Method
ZHU Feng, ZHU Yuan-lin, LIU Song-hai
(91388thUnit, The People’s Liberation Army of China, Zhanjiang 524022, China)
A passive location method based on short-time cross spectrum method is proposed to improve the passive location accuracy of a torpedo terminal trajectory measurement system. The measurement system established according to this method is introduced, the passive location algorithm of a target is given. The angle measurement accuracy, the noise influence and the typical trajectory are simulated and analyzed in the measuring area. Simulation results show that for the signal-to-noise ratio(SNR) of 10 dB,when the target is on the arc of an ±40° region and the distance between the arc and the measuring subarray is 80 m, the direction finding accuracy of the proposed location method is improved by 0.15°, and the absolute error of typical trajectory is generally reduced by 0.4 m. This research may provide a reference for evaluating torpedo effectiveness.
torpedo; terminal trajectory; cross spectrum method; passive location
朱峰, 周清锋, 刘松海. 一种基于互谱法的鱼雷末弹道定位方法[J]. 水下无人系统学报, 2019, 27(1): 93-96.
TJ630.1; TB566
A
2096-3920(2019)01-0093-04
10.11993/j.issn.2096-3920.2019.01.016
2018-08-10;
2018-08-26.
朱 峰(1993-), 男, 助理工程师, 主要研究方向为水声测控.
(责任编辑: 许 妍)
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
小哥白尼(军事科学)(2021年8期)2021-11-22
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子对抗(2020年1期)2020-04-27
兵器知识(2020年2期)2020-03-20
弹箭与制导学报(2019年3期)2019-11-13
北京航空航天大学学报(2019年9期)2019-10-26
文萃报·周二版(2019年46期)2019-09-10
