北斗地基增强系统框架下流动站定位精度分析
2019-03-14 06:20王涛蔡东健周旺辉解雯
全球定位系统 2019年1期
王涛,蔡东健,周旺辉,解雯
(1. 苏州工业园区测绘地理信息有限公司,江苏 苏州 215027;2. 滁州学院,安徽 滁州 239000)
0 引 言
随着北斗卫星导航系统(BDS)和全球卫星导航系统(GNSS)导航定位技术的不断发展,基于BDS的网络实时动态(RTK)技术已逐渐成为我国各省空间数据基础设施建设的重要手段.北斗地基增强系统是利用若干个连续运行的参考站(CORS)组成一个网络[1],各参考站通过网络将北斗等观测数据传给数据处理中心,处理中心通过参考站及网络建模数据解算出改正数信息,并将其通过GSM/GPRS公众网络发送给用户,用户根据接收到的实时差分改正信息获得实时高精度的定位结果.网络RTK实现了由传统测量作业模式向数字技术的转变,极大地提高了工作效率及精度,并广泛应用于城市规划、交通、水利、旅游、防灾减灾等领域.目前,各个省份都开始推出北斗地基增强系统框架网服务系统,使每一用户都能接收北斗卫星信号,提升了北斗系统的影响力.
苏州连续运行卫星服务系统自2006年建设运行以来,已发展成为由8个参考站组成的网系统,并于2017年支持北斗卫星信号跟踪CORS,可为用户提供包含BDS的三种卫星系统(GPS+GLONASS+BDS)组合模式(三星模式)服务信息.目前,国内外学者对CORS系统的定位精度、可靠性等做了大量研究[2-3],其中包括了对GPS+GLONASS+BDS三星导航卫星系统定位精度的研究;但是其多数都是基于基准站所接收到的卫星数据或者是流动站在无遮挡环境下的定位结果进行研究,没有针对流动站在各种复杂环境下的定位结果进行深入系统的研究.众所周知随着北斗三号系统的完善,天空中运行的卫星数增多,卫星空间分布也越来越好.基于虚拟参考站(VRS)技术的北斗地基增强系统对用户提供服务时,流动站附近的虚拟参考站的数据是由CORS网差分生成具有与基准站同等级的数据质量,则影响用户定位结果的原因主要是环境因素.本文主要目的是对流动站在不同环境下连接不同源节点的定位结果进行分析,得出一些有意义的结论.
1 苏州北斗地基增强系统简介
北斗地基增强系统是利用BDS、计算机、数据通信和互联网络等技术,在一个城市、一个地区或一个国家根据需求按一定距离建立的长年连续运行的由若干固定北斗参考站组成的网络系统[4].江苏CORS苏州分中心北斗地基增强系统框架网由8个基准站组成, 相邻站点的平均距离为47 km,基准站的分布如图1所示;控制中心软件采用天宝Pivot软件,版本为3.10.5;基准站北斗接收机设备均采用天宝接收机;用户可以基于单星模式RTCM23(GPS)、双星模式RTCM3和CMRPlus(GPS/GLONASS)、三星模式RTCM32和CMRx(BDS/GPS/GLONASS)实现用户高精度的定位,各种模式类型包括的卫星种类如表1所示.
天宝Pivot软件应用VRS技术[5],利用各个参考站的观测信息,通过建立精确的误差模型,在流动站附近产生一个物理上并不存在的VRS,由于VRS位置是通过流动站接收机的单点定位解来确定,所以与流动站的距离只有几米到十几米,结合载波相位观测值和整周模糊度来计算参考站间的综合残差.流动站表面上与VRS差分进行差分定位,其实流动站解算依然是与主参考站进行差分相对定位,VRS只是起到传递数据的作用,保持以前RTK模式与现在网络RTK模式一致.

图1 苏州CORS北斗地基增强系统框架网

模式数据源GNSS种类单星模式RTCM23GPS双星模式CMRPlus RTCM31GPS+GLONASS三星模式RTCM32 CMRxGPS+GLONASS+BDS
2 实验测试及分析
为验证系统改造升级后三星模式的稳定性,实验将从用户连接数据类型次数、基准站数据质量、流动站定位精度、不同环境测试等进行测试分析.本文通过网络RTK技术对流动站在不同复杂环境下进行测试,并就不同模式的测试结果进行对比分析.
2.1 数据类型连接次数及数据质量
目前,苏州CORS基于北斗地基增强系统框架网络正式对300多个用户提供实时服务已有一段时间,通过用户反馈的概略位置坐标文件获知用户所用的数据类型[6],统计2018年8月-10月3个月用户所用的各个源节点次数占总数的比例如图2所示.在这3个月中每个月连接的次数都有数万条,而且每个月连接三星模式次数所占百分比均在80%以上.从8月到10月各种模式变化为:单星模式减少了0.76%、双星模式基本保持不变、三星模式增长了0.73%.虽然三星模式使用次数增长比例不足1%,但是乘以每月连接的数万条总数,其增长也是几千次.因此,BDS的发展和北斗地基增强系统的应用正处于稳步上升的趋势.
为保证流动站在不同环境下测试结果不受基准站播发数据质量的影响,实验验证了基准站所解算数据的质量,对CORS站观测数据进行质量分析,从而了解站点周边环境对观测站的影响情况[7].

图2 源节点连接次数比例
基准站观测数据的质量分析普遍采用TEQC软件,该软件可用于检查双频GNSS接收机的动态和静态数据质量[8],在快速评定GNSS数据质量方面具有极大优势,能分别从数据利用率、多路径效应、周跳比三个方面反映基准站观测数据质量[9].利用TEQC软件对8个CORS站观测数据进行分析,观测数据的日期为流动站测试的当天观测数据,结果如表2所示.
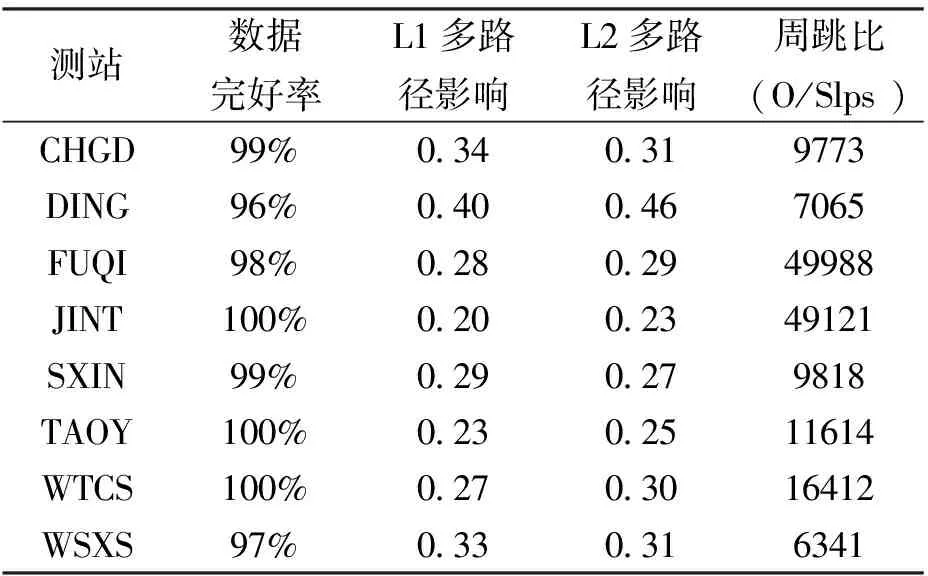
表2 基准站数据质量分析
由表2可知,8个CORS站的观测数据完好率均在96%以上,L1、L2多路径效应在0.2~0.46均小于0.5,说明L1、L2载波上的多路径效应对伪距观测值和相位观测值影响较小,观测数据与周跳比例高,说明该系统具有良好的周跳探测和修复能力.综上所述,可知苏州北斗地基增强系统CORS站的数据质量比较稳定,基准站周围观测环境较好,满足网络RTK的工作需求.
2.2 RTK精度测试
基准站数据质量良好,本文测量仪器选用具备接收BDS卫星信号能力的Trimble R10设备[10].测试区域主要包括三种,分别是无遮挡测试区域、树荫遮挡区域和建筑物遮挡区域;两种遮挡区域包括一面遮挡和两面遮挡.每种区域有2~3个已知测试点,每个测试点测试5 min,并记录初始化时间、卫星数、手簿记录的水平精度及垂直精度.
测量完成后将测量结果文件导出,将每台设备每个源节点下测量的结果、固定时的卫星数和三维位置精度因子(PDOP)值取平均值进行分析,这里要分析的结果有:固定卫星数、PDOP值、水平精度、垂直精度、外符合精度(测量值与真实值之差)、固定率和初始化时间[6-7].
2.2.1 无遮挡环境下测试结果分析
流动站在卫星通效果很好的两个已知点测试,源节点分别选用单星模式RTCM23、双星模式RTCM31和CMRPlus、三星模式CMR和RTCM32,测量方式和测量时间间隔分别为连续地形和5 s,每种源节点测试5 min,即全部固定情况下总点数为120个,外符合精度和RTK定位精度分析结果如表3所示,所有测量点数的固定卫星平均数、PDOP平均值、固定率和初始化时间如表4所示.
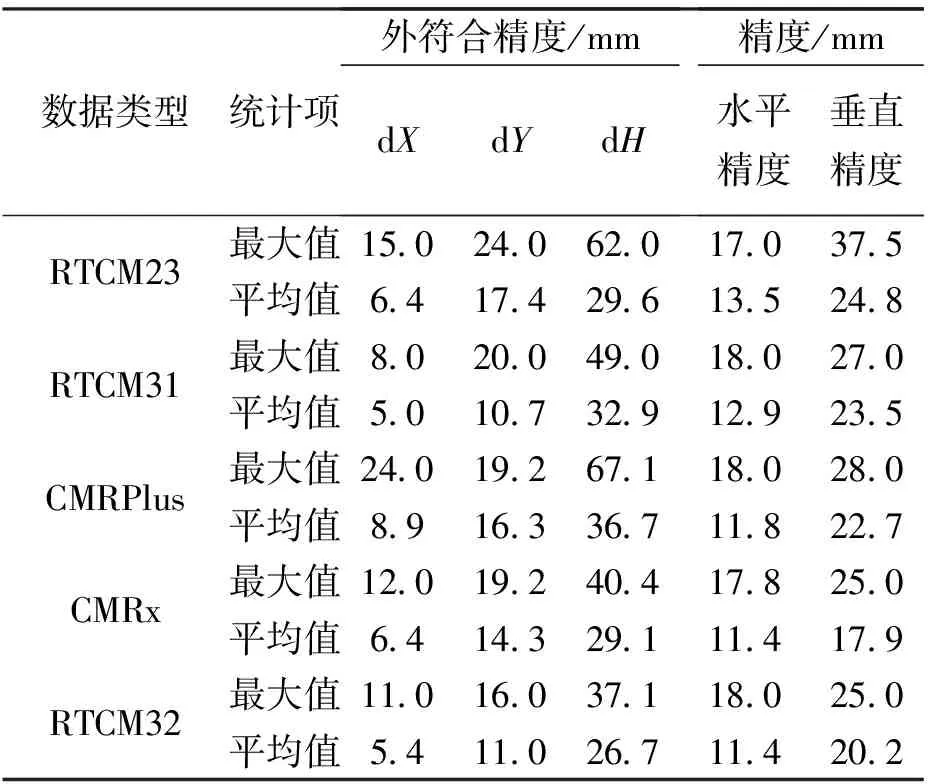
表3 流动站定位精度统计
由表3可知,在无遮挡环境下流动站连接三种数据模式定位结果的外符合精度为:X方向最大值均小于3 cm、Y方向最大值均小于2.5 cm、H方向最大值均小于7 cm;三星模式H方向的最大值小于4.1 cm且外符合精度三个方向的平均值也比其他两种数据模式精度要好.对手簿记录的水平精度和垂直精度比较结果为:三星模式最好,其次双星模式,较差的是单星模式.综上所述,在无遮挡环境下流动站R10连接三星模式源节点测得的定位结果精度更高,测量每一个点的稳定性也更佳.
由表4所示,三星模式固定的卫星数达到了18颗左右,比双系统(GPS+GLONASS)模式固定卫星数多了4~5颗,比单星模式多10~11颗;三星模式的PDOP值为0.9优于其他两种模式;在无遮挡条件下三星模式和双星模式的固定率均能达到100%要优于单星模式;三星模式的初始化时间也比双星模式减少了2 s左右,因此,由表2和表3的测试结果可知在无遮挡环境下三星模式的定位精度更高、稳定性更好、固定速度更快.
2.2.2 遮挡环境下测试结果分析
遮挡环境主要包括一面或者两面的树荫遮挡区域和建筑物遮挡区域,共5个已知点,每个点位上测5 min.上述两种遮挡区域包括一面遮挡和两面遮挡,每个区域有2~3个已知测试点,测试点所在的遮挡环境如图3所示;左上角和左下角分别为一面树荫遮挡的4和1号点,右上角和右侧中间点分别为两面树荫遮挡的5和3号点,右下角为一面建筑物遮挡一面树荫遮挡的2号点,楼高13 m,树高4~6 m.

图3 测试点位置分布
利用流动站在上述5个测试点进行测试,测量方式和测量时间间隔分别为连续地形和5 s,每种源节点测试5 min,即全部固定情况下总点数为300个,并记录相关测试信息,具体的初始化时间、卫星数平均值、手簿记录的水平精度及垂直精度、外符合精度,如表5和表6所示.
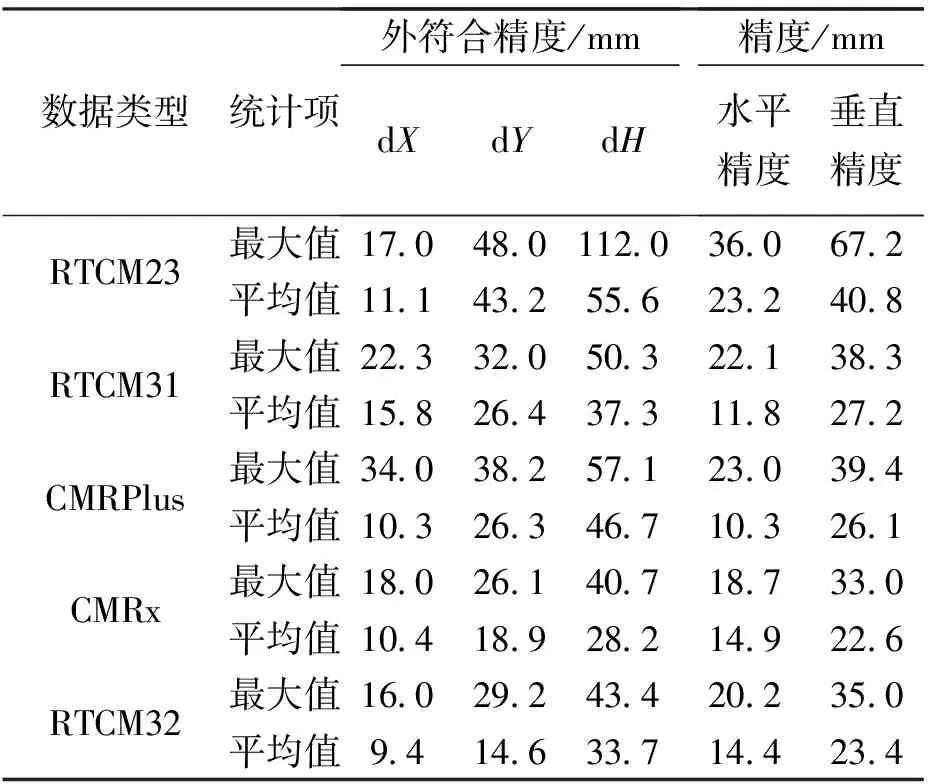
表5 流动站定位精度统计

表6 流动站固定效果统计
由表5可知,在有遮挡情况下,流动站连接三种数据模式定位精度比较结果与无遮挡情况下测试的结果一致,均是三星模式的外符合精度、水平精度、垂直精度最好,单星模式最差;对比两种环境下测试结果可知,流动站在有遮挡环境下连接三种数据模式的定位结果要比无遮挡环境下水平外符合精度要差1~3 cm,高程外符合精度要差1~5 cm,其中单星模式定位结果受到影响程度最大为2~5 cm,三星模式影响程度最小为1~2 cm,综上所述,无论在无遮挡还是有遮挡环境下流动站R10连接三星模式源节点测得的的定位结果精度更高,测量每一个点的稳定性也更佳.
如表6所示,在有遮挡环境下仪器固定的卫星数为6~14颗,要比无遮挡环境下少2~5颗,而且仪器的固定率最好的是三系统模式的98.3%,最差的是单星模式的86.3%,查阅测量数据资料发现在有建筑物和树荫遮挡的2号点以及两面树荫遮挡的5号点和3号点存在相对较多没有固定的坐标或者是精度超限的坐标,通过表5和表6结果及数据资料可知,在有遮挡的情况下三系统模式的定位精度、稳定性、固定速度都相对另外两种模式更好,且受到的影响最小.
3 结束语
本文利用天宝流动站R10在无遮挡环境下和有遮挡环境下总共7个已知点进行测试,并结合Pivot软件关于用户使用数据类型的文件信息和分析的基准站数据质量情况,得出以下结论.
1)在通视的环境下,无论用户连接任意一种数据模式都可以达到平面精度优于5 cm,高程精度优于10 cm的框架网设计标准.
2)在一面遮挡或者是部分双面遮挡的环境下,三系统模式的测量精度仍然可以保持水平精度为3 cm以内,垂直精度5 cm以内,测量结果明显好于单星模式和双星模式的源节点.
3)分析用户使用各种数据类型的连接次数和基准站数据质量可以得出,在保证基准站数据质量的情况下,用户连接三系统模式的次数处于不断增长状态,反映了我国BDS的不断完善对测绘事业发展的贡献正在逐步增大.
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
电脑报(2020年48期)2020-12-28
当代陕西(2019年18期)2019-10-17
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
电脑爱好者(2015年21期)2015-09-10
中国高新技术企业(2015年15期)2015-05-04