CBTC测试平台车载控制器控车功能测试的设计
2019-03-07 03:10:54吴仁杰徐中伟
铁路计算机应用 2019年2期
吴仁杰,徐中伟
(同济大学 电子与信息工程学院,上海 201804 )
在计算机技术、网络通信技术和控制技术的推动下,基于通信的列车控制(CBTC,Communication Based Train Control)系统成为轨道交通信号控制系统必然的发展趋势。为了测试与验证CBTC系统功能和性能,需要设计一种安全高效的CBTC系统测试平台[1]。
在实际运营场景中,CBTC系统的车载列车自动防护(ATP)子系统负责与列车安全运行相关的功能,持续检测列车当前速度和位置,为列车提供速度限制、移动授权,实时对列车进行速度监督和超速防护[2]。作为保障列车安全运行的车载ATP设备,对于车载控制器(VOBC ,vehicle on-board controller)控车功能的测试是CBTC测试平台的一项重要内容。
目前,国内对VOBC的研究主要集中在对其功能的实现,而对VOBC功能的测试研究则很少见。如文献[2]通过设计和实现车载ATP子系统,实现了其ATP防护及控车功能;文献[3]则通过构建列车自动运行(ATO)子系统,实现了列车自动驾驶功能。
本文通过对列车常见运行场景进行分析,设计了真实VOBC与仿真车辆的交互过程,以实现对VOBC控车功能的测试。
1 CBTC测试平台架构简介
CBTC系统设计工程规模巨大,仅依靠现场真实设备和场景来验证设计的正确性,其工程量将不可估量,工程周期难以保证[4]。但是通过计算机仿真技术,能够实现适用于不同信号系统、不同线路、不同列车的城市轨道交通CBTC系统通用测试平台,且该平台具备良好的稳定性、兼容性、可扩展性和动态可配置性。为实现并满足半实物半仿真测试平台需求,通过研究真实设备接口和仿真环境的接口适配与接入控制技术,搭建了一个全场景一体化的室内实验室和室外现场联动的CBTC系统仿真测试平台,实现测试平台与被测CBTC系统的无缝对接。该通用测试平台既能满足与CBTC系统仿真软件通信的需求,又能实现真实CBTC设备的接入,通用测试平台系统结构,如图1所示。

图1 CBTC系统测试平台架构图
整个测试平台由以下5个部分组成。
(1)测试控制中心设备:为测试平台提供测试数据与测试案例;
(2)仿真子系统操作终端设备群:为测试人员提供人机交互界面;
(3)测试平台仿真设备:与被测CBTC设备群交互,完成对被测设备的功能测试;
(4)被测CBTC设备群:真实的待测物理设备,通过与测试平台仿真设备交互完成测试;
(5)设备群仿真软件:测试平台初始阶段用于对测试平台仿真设备(如线路仿真子系统、车辆仿真子系统)的调试,使其具备测试能力。
本文要研究的对象是测试平台仿真设备中的车辆仿真子系统与被测CBTC设备群中的VOBC,通过对两者之间的信息交互及流程设计,完成对VOBC部分控车功能的测试。
2 VOBC概述
VOBC能保证列车的故障—安全(Fail-Safe)原则,是车载设备中最重要的设备,它是实际的控车设备,所有与信号安全有关的操作都由它来负责[5]。一般情况下,列车的每一端驾驶室都有一个VOBC,以下内容都是就列车的某一端驾驶室及其VOBC进行讨论的。
由于被测VOBC是通过继电器接口进行信息的采集与发送,而车辆仿真子系统通过以太网接口与其它子系统进行信息的发送和接收,故在车辆仿真子系统与VOBC之间增加了车载接口适配器进行转换,屏蔽了接口差异,如图2所示。车载接口适配器是一个进行信息转换的仿真软件,它既可以通过继电器接口进行数据传输,也可以通过以太网接口进行数据传输。

图2 车辆仿真子系统与VOBC的通信方式
VOBC上的继电器有两类,即VOBC输出继电器(驱动继电器)和VOBC输入继电器(采集继电器),表1和表2分别列出了部分与本文研究内容相关的继电器。
车载接口适配器通过继电器接口采集VOBC输出继电器的状态,并将其转化为VOBC命令,通过以太网接口发送车辆仿真子系统。
车辆仿真子系统根据司机在驾驶台上的操作以及接收到的VOBC命令进行逻辑运算,控制列车的运行,并同时将列车状态以及司机操作通过以太网接口发送给车载接口适配器,后者再将状态信息转化为继电器信息发送给VOBC输入继电器,从而被VOBC采集到。
VOBC根据其采集到的列车状态信息,经过其内部运算,给出相应的VOBC输出,而车辆仿真子系统根据VOBC命令(主要是各种使能命令)控制列车,故VOBC起到了安全防护的作用。

表1 部分驱动继电器定义及说明

表2 部分采集继电器定义及说明
3 常见运行场景分析
城市轨道交通中,列车常见运行场景有:紧急制动(EB ,Emergency Brake)、限制向前人工驾驶模式(RMF)、ATO自动驾驶等。本章就仿真车辆进入以上3种场景的条件进行分析,根据第2章定义的部分输入继电器和输出继电器,设计了VOBC与仿真车辆之间的交互流程。实际项目中即是通过改变各种条件来测试VOBC能否做出正确响应,只有要求的条件都满足时,列车才能进入相应的场景。
3.1 紧急制动
涉及VOBC输出:EBRD1,EBRD2,ZVI。
涉及VOBC输入:EBNA。
VOBC发现列车进入故障状态或司机按压EB按钮时会触发紧急制动。列车必须在紧急制动情况下以自身最大的制动能力去实现停车,最大限度地实现列车安全[6]。VOBC实现紧急制动的流程如下:
(1)VOBC控制EBRD1=0,EBRD2=0;
(2)仿真车辆切除牵引,并输出紧急制动,设置EBNA=0并以既定减速度减速至停车;
(3)VOBC检测到停车后,输出ZVI=1;
(4)VOBC检测到EB条件不满足后,控制EBRD1=1,EBRD2=1;
(5)仿真车辆判断(3)、(4)条件满足后,输出EBNA=1,解除EB。
3.2 RMF驾驶模式选择
涉及VOBC输出:RM_IND。
涉及VOBC输入:KSON,RM_PB,RMF,MCS。
RMF即正向人工限制驾驶模式,是列车运行时最常见的一种驾驶模式。列车的监控、运行、制动及开关车门由司机操作,车载设备仅对列车速度进行超速防护,当列车超过速度限制后会触发紧急制动[7]。
图3和图4分别为仿真车辆侧和VOBC侧的控制流程图,两者之间信息传输接口在第2章已说明。

图3 RMF驾驶模式选择仿真车辆侧控制流程图
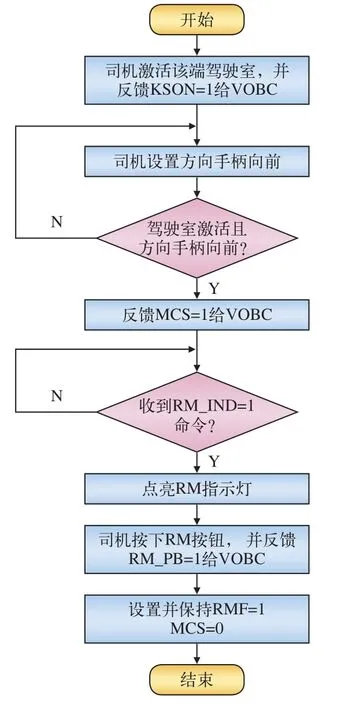
图4 RMF驾驶模式选择VOBC侧控制流程图
RMF驾驶模式选择VOBC侧控制流程如下:
(1)司机激活该端驾驶室,仿真车反馈KSON=1;
(2)司机方向手柄在向前位,仿真车判断(1)、(2)条件满足,反馈MCS=1;
(3)VOBC采集到KSON=1并且MCS=1,输出RM_IND = 1;
(4)仿真车辆据此点亮RM指示灯;
(5)司机按下RM选择按钮,仿真车反馈RM_PB=1;
(6)仿真车辆设置并保持RMF = 1(即便RM_PB按钮已复原),设置并保持MCS = 0;
(7)VOBC采集到RMF=1,并且判断仿真车辆可进入RMF模式。
3.3 ATO运行模式
涉及VOBC输出:ATO_IND,ATO_OP,MDR,BDR。
涉及VOBC输入:KSON,NDC,ATO_PB。
ATO是CBTC系统的重要组成部分,属于VOBC的非安全子系统,ATO能够控制列车运行,实现列车自动驾驶[3]。ATO也叫AM模式,列车进入ATO模式后即无需司机操控。车载ATO子系统生成ATO控制命令,并将控制命令发送给列车,触发列车的牵引、制动、惰行[8]。VOBC会根据目标距离动态的改变列车的牵引力,进而控制其加速度和速度,是列车进站停准停稳的重要手段。
图5、图6分别为VOBC侧和仿真车辆侧的控制流程图。
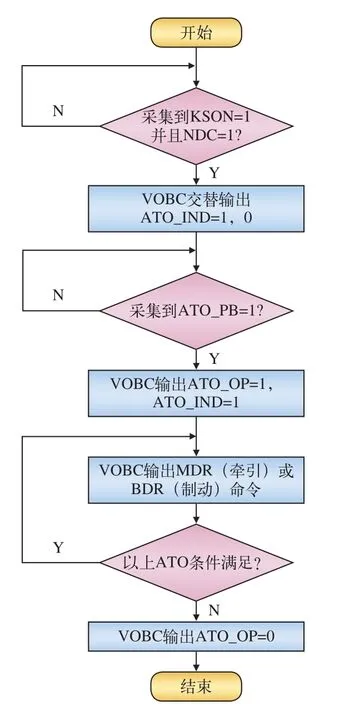
图5 ATO模式选择VOBC侧控制流程图
ATO模式选择仿真车辆侧控制流程如下:
(1)司机激活该端驾驶室,仿真车反馈KSON=1;
(2)司机选择方向手柄在向前位且牵引手柄在0位,仿真车反馈NDC=1;
(3)VOBC 交替输出 ATO_IND=1,0(1 s 方波);
(4)仿真车据此闪烁ATO指示灯;
(5)司机按压ATO发车按钮,仿真车反馈ATO_PB=1,该按钮会延迟一段时间后自动复位;
(6)VOBC进入AM模式,输出 ATO_OP=1,保持ATO_IND=1;
(7)VOBC输出MDR或BDR牵引、制动命令;
(8)仿真车设置ATO发车指示灯常亮,并根据7条件控制列车牵引、制动运行(牵引制动力大小来自电流环);
(9)VOBC输出ATO_OP=0;
(10)仿真车不再根据VOBC的牵引制动命令控车,退出ATO模式。

图6 ATO模式选择仿真车辆侧控制流程图
4 结束语
VOBC是保障列车安全运行的重要设备,因此,对于VOBC的测试也是CBTC测试平台的一个重点。本文给出了CBTC测试平台的架构,分析了VOBC与车辆仿真子系统的关系,针对3种常见的列车运行场景,设计了VOBC与仿真车辆的交互流程,并以此测试VOBC的控车功能。经过实际项目测验,该设计能很好地完成对VOBC控车功能的测试。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
铁道通信信号(2020年8期)2020-02-06 09:13:22
铁道通信信号(2020年8期)2020-02-06 09:13:18
电子测试(2018年22期)2018-12-19 05:12:42
铁道通信信号(2018年8期)2018-11-10 05:15:44
中国公共安全(2017年11期)2017-02-06 05:28:09
电子制作(2016年23期)2016-05-17 03:53:43
电源技术(2015年2期)2015-08-22 11:28:14
自动化博览(2014年10期)2014-02-28 22:33:42