
V2X车路协同系统设计方案综述
2019-03-04 05:14裴丽珊王祎男董馨
汽车文摘 2019年3期
裴丽珊 王祎男 董馨
(中国第一汽车集团有限公司 智能网联开发院,长春 130011)
主题词:V2X LTE-V DSRC 车联网 自动驾驶 车载设备 路侧设备
1 前言
随着全球汽车行业的智能化、信息化、低碳化、智能制造/绿色制造的发展,感知融合在自动驾驶领域中成为不可或缺的重要角色。图像识别、超声波雷达、激光雷达、毫米波雷达等作为传统感知手段因受光线、天气、距离、成本等因素影响存在各自局限难以突破,V2X通过低延时、高可靠的车与万物的网络连接交互,使自动驾驶具有了更强的探测感知能力。V2X作为智慧交通系统工程的一个组成部分,汽车与其他交通参与者实现实时互动,致力实现真正的自动驾驶[1]。随着5G通信技术的逐步落地实施必将大力推动汽车V2X技术发展[2]。
V2X车路协同技术目前主要包括三种形式,分别为车辆与车辆通信(Vehicle to Vehicle,简称V2V)、车辆与基础设施通信(Vehicle to Infrastructure,简称V2I)以及车辆与行人通信(Vehicle to Pedestrian,简称V2P),通过车、人、道路设施之间的信息交互,辅助车辆实现在复杂环境中感知融合、智能决策、协同控制等功能[3]。V2X车路协同系统充分实现了人、车、路的有效协同,提高驾驶安全性,减少城市交通拥堵、从而提高城市交通管理效率,同时为自动驾驶领域起到“保驾护航”的作用。
2 V2X软、硬件构架设计
V2X车路协同系统从系统应用整体考虑,分为物理设备层、系统层和应用层三个层次,每一层均实现不同的功能支撑,三个层次结构有序配合,实现车路协同各种应用场景[4]。其中,物理设备层的功能是实现基本数据采集和数据交互,同时也包含支持上述功能正常运行的设备驱动软件等;系统层和应用层为软件层,实现系统数据管理和预定义应用场景服务功能,其中应用层在系统核心模块的支撑下工作,包括工作流引擎、数据处理引擎以及地理信息系统(Geo-Information system,GIS)定位引擎,三大核心引擎保证了系统应用场景的平稳运行。
2.1 硬件系统
V2X车路协同系统物理设备主要由车载设备(On Board Unit,OBU)、路侧设备(Road Side Unit,RSU)以及车辆显示终端[5]三部分组成(图1),车载设备安置于移动车辆中,获取移动车辆的状态并作为信息传输载体;路侧设备则固定于道路两边或道路龙门架上,作为交通、路况及道路基础设施状况的载体;车辆显示终端中以平板为载体连接车载或路侧设备,以便驾驶人员对周围交通和实时路况实现现场可视化监测,同时,摄像头可作为路侧设备的配件,通过网口通信,用于行人检测相关场景[6]。
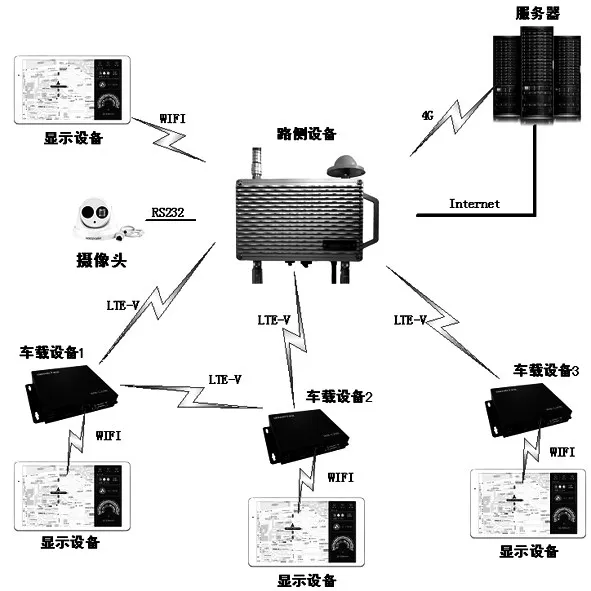
图1 V2X车路协同系统硬件构成
通过车载设备之间以及车载和路侧设备之间的有序配合,实现各种车与车、车与路等预定义应用。所有路侧设备通过有线网络或4G网络从服务器获取路况和交通信息。
2.2 软件系统
V2X软件系统可采用分层的低耦合设计以实现多车接入共用。预警信号通过危险仲裁模块统一输出,采用CAN、串口、网口等输出方式,配合支持多种显示终端。预警的触发参数在设备内置文件进行保存与配置,同时支持通过显示终端如平板中APP进行配置[7]。
整体软件逻辑构架可划分为三个层次:输入输出层(I/O Layer)、应用服务层(Service Layer)和应用层(Application Layer),见图2。
输入输出层(I/OLayer)负责设备与外部设备的通讯功能,实现设备所有数据的输入和输出,主要由无线消息服务(Wireless Message Service,WMS)、时钟位置服务(Time/Position Service,TPS)、车辆接口服务(Vehicle Interface Service,VIS)三大模块组成。WMS模块主要负责与其他V2X设备通讯,实现无线数据的收发和安全认证,具体包括相关标准的V2X通信协议栈,覆盖MAC(Media Access Control)层、网络层、传输层协议,为上层应用提供无线消息交互通道;安全模块为可选装模块,负责数据的签名和验证、证书管理及加解密。TPS模块主要负责与GPS模块通讯,实现本地GPS数据的接收,同时也支持向GPS发送数据(差分),具体包括本地GPS数据获取、系统时钟同步、向GPS发送差分数据(与GPS模块有关,预留)、三轴加速度及角速度数据获取和发送(与GPS模块有关,预留)。VIS模块主要负责与车辆通讯,实现车辆数据的收发,具体包括获取车辆状态数据、向车辆输出预警信息等数据以及支持CAN通讯方式。
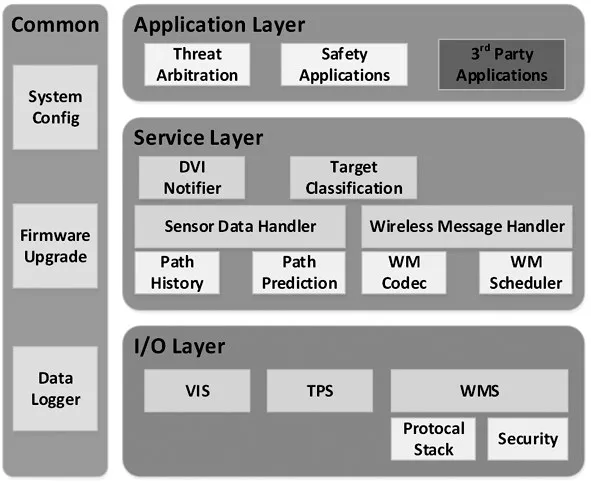
图2 软件逻辑架构图
应用服务层(Service Layer)负责对输入数据的整合、处理,并分发至应用层,同时为应用层提供数据发送的接口,主要由传感器数据处理(Sensor Data Han⁃dler,SDH)、无线消息处理(Wireless Message Handler,WMH)、目标分类(Target Classification,TC)、人机交互接口(DVINotifier)四大模块组成。SDH模块主要负责对传感器数据的整合和处理,包括整合车辆状态和位置等数据、生成车辆历史路径数据、计算车辆路径预测数据。WMH模块主要负责无线消息的编解码等处理工作,同时为应用层提供无线数据发送的接口,包括无线消息编解码,按照相应的标准对无线消息进行编解码;无线消息调度器按照相应的调度规则对无线消息进行调度发送(预留);提供无线消息发送接口,包括标准消息和用户自定义消息;支持无线消息的接收,并根据消息类型进行分发,可同时为多个模块提供服务。TC模块主要负责计算他车的相对位置,对车辆进行分类,根据相对位置对他车基础安全信息进行分发,可同时为多个模块提供多个相对位置的他车基础安全信息。DVI Notifier模块主要负责为应用层提供与车辆交互的接口,接收应用层的输出数据,将其输出至VIS。
应用层(Application Layer)负责实现常见的安全应用,实现影响车辆安全的危险判别和输出,主要有安 全 应用(Safety Applications,SA)与危险仲裁(Threat Arbitration,TA)两大模块组成。SA模块包括各种常见的安全应用场景子模块,如FCW(前向碰撞预警)、LCW(变道辅助)等,根据输入的相关数据判别对应的危险,并输出预警信息。各场景相互独立,互不干扰,具有很好的扩展性。同时支持用户自定义的第三方应用,比如用户自定义的语音、视频应用等,与原有应用也相互独立。TA模块负责接收所有应用场景输出的预警信息,并按照相应的规则对预警信息进行调度、仲裁,挑选出最紧急的预警信息,输出至人机交互接口(DVINotifier)。
上述三层软件相互独立,耦合性低。其中仅I/O Layer(输入输出)层与硬件平台相关,针对不同的硬件平台,按照预先设定的接口替换该层软件,安全应用之间相互独立。
2.3 系统平台
为支撑整个系统运行的平台,在底层的硬件设备之上为Linux系统,运行协议栈、设备驱动、GPSD(Global Positioning System Daemon)、文件系统等底层服务模块[8]。系统软、硬件平台构架见图3,各模块功能见表1。
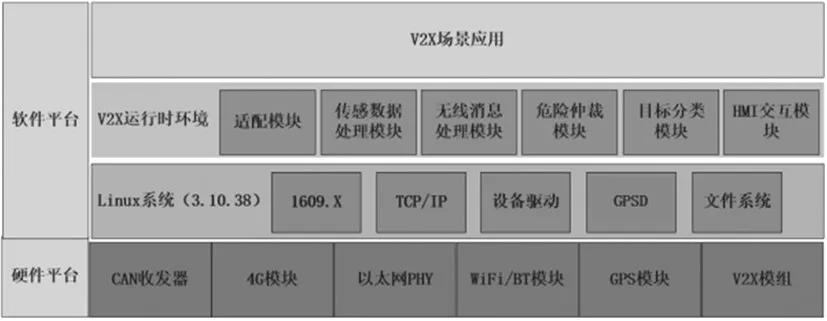
图3 系统软、硬件平台架构
3 系统特点
V2X车路协同系统主要用于实现汽车与汽车之间、汽车与交通基础设施之间的高速、高可靠性的数据通信,支持驾驶安全类、交通效率类和信息娱乐类等丰富应用。产品主要适用于车路协同(V2X)、协作式智能交通(Cooperative-Intelligent Transportation System,CITS)和自动驾驶汽车(Autonomous Vehicle,AV)等领域,包括但不限于碰撞避免预警、盲区检测、紧急车辆信息通告、收费相关应用、商业运营应用等[9]。
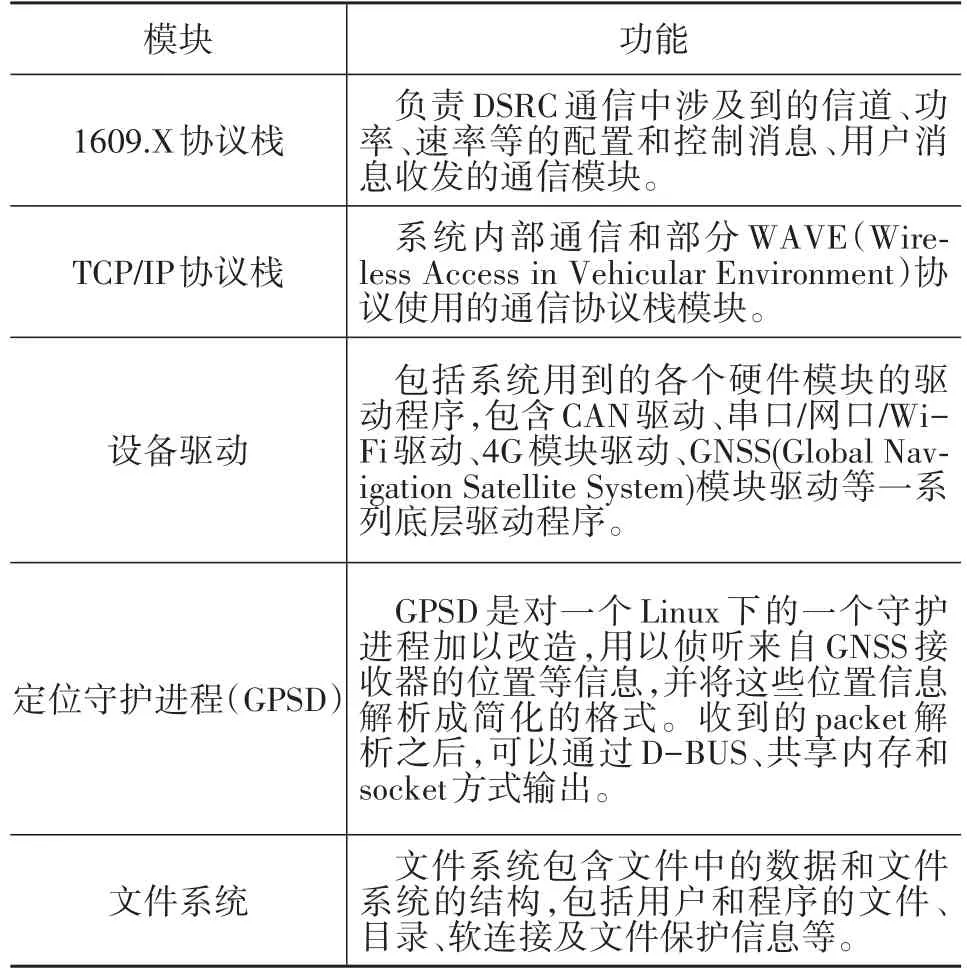
表1 各模块的功能
V2X系统主要具备以下先进技术和高可靠品质的工作特点:
(1)点对点通信距离最远可达800 m,最高通信速率27 Mbps,具备自组网功能,支持车队间可靠视频通信功能;
(2)低时延、低丢包率,支持车与车、车与路之间可靠通信;
(3)高性能的嵌入式处理器和前端通信模块;(4)内置高精度模块芯片,车道级定位精度,能实现道路车道识别;
(5)符合车规系列防护标准,满足各种复杂应用场景要求;
(6)预警配置灵活、支持震动、声音、动画预警,可接入车装抬头显示(Head Up Display,HUD)进行道路及交通预警。
4 系统场景应用
根据V2X技术特征,行驶在道路上的车辆会向周围广播自身定位信息、车道信息、行驶方向、速度等信息;特殊情况下会广播对应的紧急情况信息。针对每个V2V、V2I场景进行定义和解析,结合V2V、V2I典型应用场景的大致描述,主要有以下应用场景,前向碰撞预警(FCW)、交叉路口碰撞预警(ICW)、左转辅助(LTA)、盲区预警/变道预警(BSW/LCW)、逆向超车预警(DNPW)、紧急制动预警(EBW)、异常车辆提醒(AVW)、车辆失控预警(CLW)、道路危险状况提示(HLW)、限速预警(SLW)、闯红灯预警(RLVW)、弱势交通参与者碰撞预警(VRUCW)、绿波车速引导(GLOSA)、车内标牌(IVS)、前方拥堵提醒(TJW)、紧急车辆提醒(EVW)、汽车近场支付(VNFP)等V2V及V2I多类应用场景。V2X技术整体应用还有待开发和完善。
5 结束语
随着时代的发展与进步,车联网技术已成为自动驾驶领域及智能交通系统中不可或缺的一项重要技术项目,文章通过对基于LTE-V及DSRC的V2X车路协同系统技术的软、硬件架构设计方案进行综述分析,简明扼要的阐述了V2X系统高可靠、低时延的特点,对系统现今大多类应用场景进行介绍总结,为V2X车路协同系统整体商业化、5G通信演进奠定基础[10]。
猜你喜欢
包装工程(2022年1期)2022-01-26
意林原创版(2021年7期)2021-08-03
电子技术与软件工程(2017年3期)2017-03-22
教育教学论坛(2016年49期)2017-02-27
物联网技术(2015年8期)2015-09-14
小说月刊(2014年11期)2014-04-18
