
雷达视频复合防撞系统
2019-02-20 08:41:30朱海洋朱思悦代孝森
军民两用技术与产品 2019年1期
杨 硕 朱海洋 朱思悦 代孝森
(1.上海无线电设备研究所,上海 200090;2.上海市目标识别与环境感知工程技术研究中心,上海 200090)
常见的公共交通工具有地铁、公交、轻轨等,现代有轨电车因具有不排放SO2等有毒尾气等优势而得到国内许多城市交通建设部门的青睐。有轨电车通常在道路中央行驶, 为了保障交通安全,在人行道和十字路口转弯交汇处,需采取相应的防护措施。
毫米波雷达作为一款比较成熟的产品,它的探测性能是非常稳定的,对环境的要求较低,即使是雨雪天气也能很好地工作。它的功能主要有测量目标距离、测量目标的速度及方位角3方面。除了功能的多样性,毫米波雷达在其他方面也显示出了优势。例如,其结构非常简单,应用最新的射频收发芯片可以快速搭建出一套完整的系统;由于工作频率的关系,毫米波雷达的发射功率低且可以获得较高的分辨率和灵敏度,同时其天线可以做得很小,在主动防撞系统方面,毫米波雷达已成为首选。经过实际测试,雷达系统存在行人及单车无法探测的问题,所以本系统增加了视频设备对近距行人、单车及车辆的探测预警。
1 系统构成
有轨电车雷达视频复合防撞系统通过雷达传感器和视频传感器共同探测列车运行前方障碍物,评估其对电车的危害等级,并给出相应等级预警信号。其具有探测有轨电车前方障碍物、危险预警及实现与信号系统车载控制主机网络通信的功能。
该系统主要包括雷达传感器、雷达系统主机、视频传感器、视频系统主机,障碍物防撞雷达视频融合系统架构图如图1所示。

图1 障碍物防撞雷达视频融合系统架构图
障碍物防撞系统主要由雷达系统与视频系统组成,雷达系统对远距车辆目标进行跟踪预警,视频系统对近距目标进行探测预警。
1.1 雷达系统构成
障碍物防撞雷达系统由雷达传感器、数据处理模块、电源模块、线缆、安装支架及系统软件组成,其中,数据处理模块及电源模块采用一体化设计构成系统主机。
1.2 视频系统构成
视频系统由视频传感器、摄像头单元、数据转换及供电模块组成,视频传感器包含镜头及视频处理模块,摄像头单元负责采集视频数据并进行处理,数据转换及供电模块负责视频系统的供电及视频系统与雷达系统主机间的数据传输功能。
2 雷达系统技术原理
2.1 系统方案
本系统采用毫米波雷达FMCW体制实现对障碍物的探测识别,通过两发多收的天线方式,可以对多个目标参数进行有效检测。
雷达利用障碍物对电磁波的反射现象来发现目标并测定其位置。本方案中障碍物探测雷达安装于有轨电车上,在76GHz毫米波段工作,利用调频连续波测定障碍物距离,通过数字波束形成技术确定目标方位,从而实现对多目标距离、速度、方位的检测。接收波束形成使用n个接收天线阵元组成的天线阵列,如图2所示。接收波束形成技术将多个接收天线接收到的信号合成一个波束,波束角由天线阵列参数决定,合成的信号具有该方向接收波束增强的功能;波束指向由相位补偿决定,可根据需要接收某一方向上的回波信号,因此具有空间滤波的作用。接收天线灵敏度高,可以检测到微弱的小信号,其中每个接收波束在空间辐射的范围与多个接收波束是一样的,故从技术实现上来讲,多波束接收比多波束发射而言更易实现,而且也方便处理,因而本套方案采用宽波束发射、多波束接收的方式。
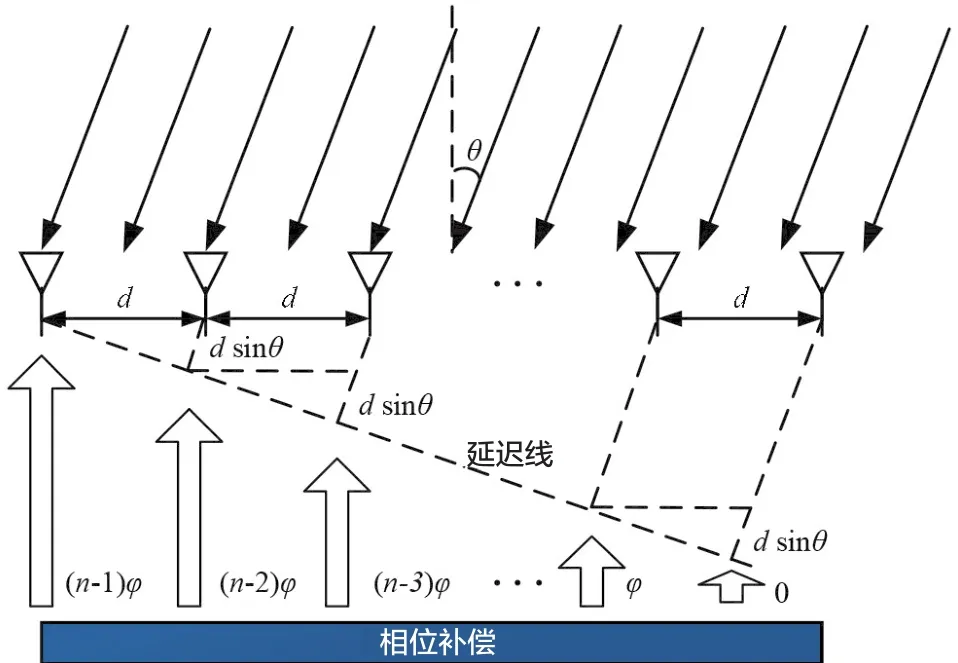
图2 接收数字波束形成原理
雷达安装在有轨电车上,雷达天线采用两发多收的模式,能够进行短距离和长距离混合测量,如图3所示。
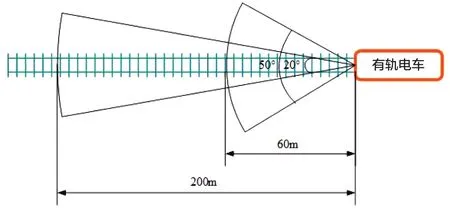
图3 有轨电车毫米波雷达探测图
短距离测量采用宽波束,雷达方位角为50°,垂直波束角为4°,探测距离为60m;长距离测量采用窄波束,雷达方位角为20°,垂直波束角为4°,探测距离为200m。窄雷达波束主要捕捉远距目标,有助于司机及时发现目标并有足够的反应时间,能够有效避免有轨电车在经过交叉路口时,因一些突发事件而发生的交通事故。宽雷达波束主要捕捉车头近区视觉盲区难以察觉的近距目标,从而避免有轨电车发生一系列由盲区导致的碰撞事故。
2.2 距离-多普勒目标回波二维处理技术
雷达系统通过距离-多普勒二维回波处理,实现目标距离、速度信息的一体化测量,提高数据处理的实时性,并提升信号处理积累增益,从而有效提高雷达系统对目标的探测灵敏度,可以很好地解决多目标识别问题。二维距离-多普勒处理方法采用锯齿形调频连续波信号,通过对多个周期的数据进行采样,求取平均值,并用每个周期的实际值减去此平均值,可以抑制部分固定杂波,对后续信号处理而言有所简化。经过处理后,也可以在复杂环境中对运动目标的距离和速度进行去耦。雷达发射波形采用锯齿波线性调频连续波,如图4所示,该雷达信号由单扫频段信号组成,每个周期只有一个调频斜率,即信号的频率在一个周期内先逐渐上升,到设定的值后迅速下降到初始值,周期重复。这种信号对现在的信号发生器来说是比较容易产生的,因而在现代雷达系统里面得到了较为广泛的应用。
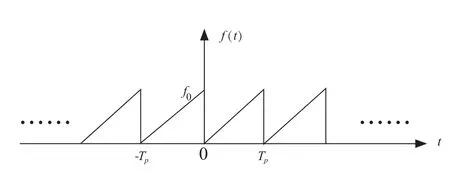
图4 锯齿波LFMCW雷达信号图
锯齿形调频连续波信号发射后的回波信号经采样得到波形离散数字信号,如图5所示。

图5 回波信号采样图
将[a,b,c,d,e,…]进行FFT变换,得到频谱谱[A,B,C,D,E,…],其中包含目标距离和速度引起的频率fm,积累多个周期数据后得到以下矩阵:
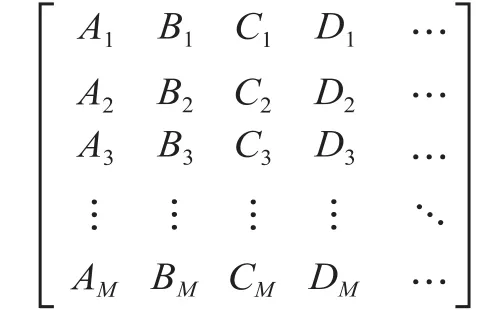
此时的目标速度可以通过比较几个周期间的包络变化而得到,即对采样的多个周期数据分别进行处理,对每个距离单元比如[A1, A2A3,…,AM]进行FFT的变换,变换完成之后可以计算出其所对应的频率fv。通过距离速度求解公式便可以计算出目标的距离和速度。图6为存在地杂波下多个目标的二维FFT的实测结果图。
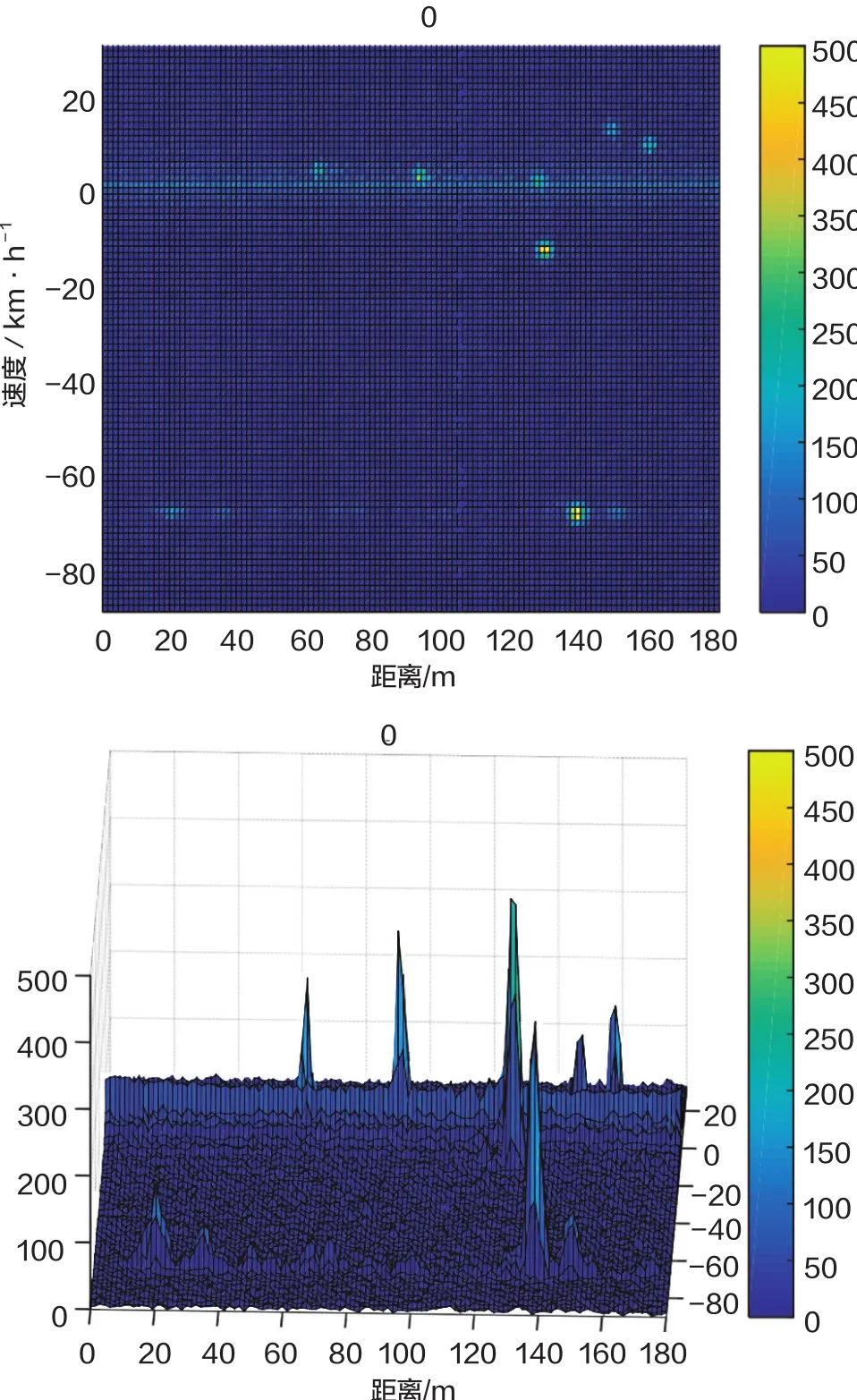
图6 地杂波下多目标二维FFT处理图
在做二维FFT处理时,要有一个约束条件,主要是调频周期T,因为第二维FFT和第一维FFT是相关联的,二维FFT实际上是对第一维的处理结果进行调频周期T的等间隔采样,然后根据奈奎斯特采样定理所述,当采样频率Fs=1/T大于2倍的信号频率时才能保证产生的多普勒频率不发生混叠。假设我们需要检测运动目标,其最大速度为v,通过计算这个最大速度对应的多普勒频率如下:


通过上式可知,为了保证测速时不模糊,调频周期T应该减到比较小时才满足。设距离分辨率为Δ R,这时由距离和速度之间的耦合而引起的距离误差如下:

可见这个值很小,可以忽略不计,说明已经消除了两者之间的耦合。
2.3 视频近距离探测系统
雷达视频复合防撞系统中的视频系统采用Mobileye成熟产品,如图7所示。主要用于近距离目标的前向防撞预警(FCW)和行人碰撞预警(PCW)。

图7 Mobileye视频采集仪
视频采集仪的摄像头为非广角形式,拍照角度有限,故需安装在距中轴线左右两边15cm范围内,同时安装位置应尽可能不遮挡司机视线。视频采集仪检测到的报警信息将通过雷达视频复合防撞系统的主机过滤,并与雷达的报警信息融合进行预警信息的输出,提醒有轨电车驾驶员,避免发生碰撞事故。
3 系统功能
3.1 限界内障碍物检测识别
障碍物探测系统可检测有轨电车运行前方轨道限界内的目标,对目标的距离、速度、方位进行测量计算,再通过现代数字滤波器跟踪预测其运动轨迹,根据其运动特性(接近/远离等)、与列车的距离、目标运动速度及有轨电车的速度、制动特性来计算评估其对电车的危害等级。
(1)静态目标。限界内的静态目标应被识别,电车轨道应去除。
(2)动态目标。限界内的动态目标应被识别,并根据其运动轨迹评估有无危害。障碍物探测系统不应误报和漏报前方障碍物。
3.2 限界外障碍物检测识别
障碍物探测系统可检测有轨电车运行前方轨道限界外的目标,对目标的距离、速度、方位进行测量计算,再通过现代数字滤波器跟踪预测其运动轨迹。根据其运动特性(接近/远离等)、与电车的距离、目标运动速度及有轨电车的速度、制动特性来计算评估其对电车的危害程度。
(1)静态目标。限界外的静态目标应被去除。
(2)动态目标。限界外的动态目标应被识别,根据其运动轨迹评估有无危害。
3.3 坡道、弯道障碍物检测识别
障碍物探测系统根据线路数据和列车定位信息,识别出列车当前位置线路状况,如坡道、弯道路况等。
(1)坡道。在上坡和下坡路况中,障碍物探测系统需对坡度等线路情况进行分析,进行障碍物报警识别,不应因上坡或下坡造成误报或漏报。
(2)弯道。在弯道路况下,障碍物探测系统对弯道转弯半径等线路情况进行分析,调整线路限界,进行障碍物报警识别,不应因弯道造成误报或漏报。
3.4 平交路口障碍物检测识别
障碍物探测系统根据线路数据和列车定位信息,识别出列车当前位置是否为平交路口。在平交路口路况下,障碍物探测系统需考虑前方车辆较多及车头近距盲区情况,调整探测分析及预警算法,进行障碍物报警识别,不应因平交路口造成误报或漏报。
3.5 多级预警功能
障碍物探测系统可检测最多32个障碍物的距离与方位、运动障碍物的运动轨迹。系统的处理中心根据探测信息和电车自身的运动参数,如列车的运行速度,确定可能发生碰撞的位置与碰撞预计时间,判别前方障碍物的危险等级,并实时向车载设备传送潜在危险目标的信息。根据有轨电车的紧急制动率、常用制动率将预警情况分为3类,分别是存在碰撞风险、很大可能碰撞和无可避免碰撞,如图8所示。
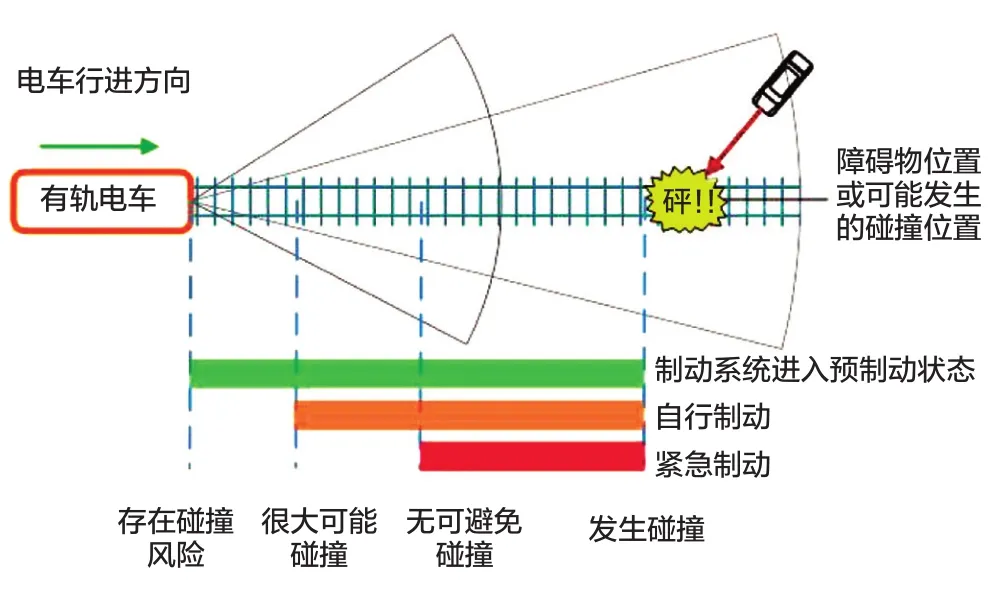
图8 障碍物危险等级及应采取的制动措施
当障碍物探测系统探测到障碍物存在碰撞风险时,进行预警提醒。当列车与障碍物位置或可能发生碰撞的位置距离较近时,系统判断为很大可能发生碰撞,此时列车应及时采取常规制动措施。而当列车与障碍物位置或可能发生碰撞的位置距离更近时,系统会判断为无可避免的碰撞,需采取紧急制动。
3.6 视频系统功能
(1)前向防撞。在与前方车辆可能发生碰撞前,最多提前2.7s发出警示音;报警音为一连串高音量蜂鸣。
(2)低速前向防撞。在与前方车辆可能发生低速碰撞前会发出警示音;在速度低于30km/h时启用,报警音为一连串短促的高音量蜂鸣。
(3)行人避撞。行人穿过车辆前面的行驶路径时发出警报;仅在日间速度低于50km/h时启用,在光线昏暗处或夜间,系统不起作用;报警音为一连串高音量蜂鸣。
天气、光照等情况会给视频系统的识别与反应能力带来很大影响,如果部分或完全阻挡视觉传感器的视野,会导致视频系统功能的丧失或削弱。
4 结束语
障碍物防撞雷达视频复合系统为有轨电车运行提供了辅助安全预警功能,对可能发生的危险进行预警提示,雷达传感器及视频设备虽采用了相关领域的顶尖创新技术,但仍不能保证 100%准确检测车辆与行人,因而不能保证提供一切相应声音警告。因为路面、路旁设备、天气及其他情况会对系统识别与反应能力带来很大影响,所以应在继续依靠安全驾驶规范及安全驾驶实践的基础上,辅助使用该系统。
(本文得到上海市“科技创新行动计划”社会发展领域项目《基于时空链网的大型桥梁航行防护技术研究与示范》(17DZ1204300)、上海市“科技创新行动计划资助高新技术领域项目”《国产77GHz车载毫米波芯片及雷达系统产业化技术研究》(17DZ1100100)资助)
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
传感器与微系统(2018年7期)2018-08-29 00:44:20
汽车工程师(2018年1期)2018-07-13 00:47:56
中国公路(2017年13期)2017-02-06 03:16:33
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
