
量子粒子群BP神经网络在GNSS高程转换中的应用分析
2019-02-15 05:06
测绘通报 2019年1期
(宁波市测绘设计研究院,浙江 宁波 315100)
GNSS技术不断完善和成熟,其在测绘领域的应用也变得越来越广泛,大幅提高了测绘外业工作效率,但在大地高与水准高转换应用方面仍主要依赖水准面精化模型[1]。通过水准面精化模型进行高程转换,优点是精度高;缺点是建设成本大、周期长,对作业人员技术水平能力要求高,大范围推广应用难度较大。在经费少、工期短、范围小、无法使用水准面精化模型的情况下,如何高效、便捷地实现GNSS高程转换,已经成为制约GNSS高程应用的一个难题。
目前主流的GNSS高程转换方法就是利用获取的样本数据,通过严密的数学计算方法,建立GNSS点坐标与水准高之间的数学映射关系模型。BP神经网络算法是一种模拟人脑的数学计算方法[2-3],具有网络自适应映射能力,可用于GNSS高程转换的非线性映射运算,但其本身也存在一些缺陷,主要表现为收敛缓慢,易出现因“过训练/过拟合”情况而陷入局部最优,网络参数确定困难等。
量子粒子群算法(quantum-behaved particle swarm optimization,QPSO)是一种引入了量子行为的启发式进化算法,具有极强的粒子搜索性能,使粒子可以在空间中更高效地搜索到全局最优解,目前已被广泛应用于函数优化、神经网络训练等领域。
本文提出利用量子粒子群算法(QPSO)对BP神经网络进行优化,通过构建量子粒子群BP神经网络实现GNSS点坐标到正常高的转换计算,改进传统BP神经网络算法存在的局部收敛、无法收敛等缺陷,并通过仿真试验来验证量子粒子群BP神经网络算法的实际效果。
1 粒子群优化算法(PSO)
粒子群优化算法是一种随机全局迭代进化算法[4-6],具有稳健性和全局搜索能力强、参数少、算法简单、易编程实现等优点,能有效改进BP神经网络易陷入局部最优的缺陷,大大提高其计算效率及性能。
PSO算法通过搜索空间中粒子位置求取优化问题最优解,算法具体原理如下:
假设存在一个D维搜索空间,该空间中有S个粒子组成的粒子群X={X1,X2,…,Xs},根据适应度函数计算并寻找最优解。第i个粒子的位置在搜索空间中可表示为向量Xi=[Xi1Xi2…Xid…XiD]T,速度可表示为向量Vi=[Vi1Vi2…Vid…ViD]T,个体最优解可表示为Pi=[Pi1Pi2…Pid…PiD]T,整体最优解可表示为Pg=[Pg1Pg2…Pgd…PgD]T。通过粒子自身速度和位置的不断迭代,对当前解Xi、个体最优解Pi、整体最优解Pg适应度值进行比较,不断更新个体最优解Pi及整体最优解Pg。每进行一次迭代,粒子会通过式(1)更新自身位置和速度,即
(1)
式中,d=1,2,…,D;i=1,2,…,S;k为迭代次数;Vid为粒子速度;c1和c2分别为认知学习因子和社会学习因子,表示寻找最优解的加速项权重;r1和r2为分布于[0,1]区间的随机数;w为惯性权重,主要控制算法搜索和收敛能力。当w取值较大时,算法全局搜索能力强而局部收敛性弱;当w取值较小时,算法局部收敛性好但全局搜索能力弱。
粒子位置和速度一般限定在区间[-Xmax,Xmax]和[-Vmax,Vmax]内,Xmax限定粒子位置区间,Vmax限定粒子最大移动距离,以防止粒子盲目搜索、提高算法收敛性;w初始值通常取较大值,令其随着粒子群迭代而线性递减,保证算法在迭代初期具有较强的全局搜索能力,而在后期则转向局部精细搜索以获得高精度最优解。
2 量子粒子群算法(QPSO)
经典力学中,粒子i沿确定轨迹运动,其状态由位置Xid和速度Vid来确定;但在量子力学中,粒子行为则具有多态和不确定性,有概率出现在空间任一位置,其位置Xid和速度Vid无法同时确定。因此,如果粒子具有量子行为,则PSO算法的工作方式将变得不同,即孙俊等提出的粒子具有量子行为的QPSO算法[7],其算法具体原理如下:
假设一个D维搜索空间中有m个粒子组成的粒子群,记第i个粒子当前位置是Xi=[Xi1Xi2…Xid…XiD]T,第i个粒子搜索到的最优位置为Pi=[Pi1Pi2…Pid…PiD]T,粒子群整体最优位置为Pg=[Pg1Pg2…Pgd…PgD]T,势中心点P=[P1P2…Pd…PD]T。其中势中心点计算公式为
Pd=(r1Pid+r2Pgd)/(r1+r2)
(2)
粒子状态则按下式进行迭代和更新
L=z|Xid(t)-P|
(3)
(4)
3 量子粒子群BP神经网络方法及实现
QPSO算法优化BP神经网络的基本原理如下:将神经网络权值和阈值进行粒子化,根据网络结构定义并构建粒子群空间,其空间维数D一般由网络输入层节点数n、隐含层节点数l、输出层节点数m来确定,具体可表示为D=n×l+l×m+l+m。搜索空间中的每个粒子代表着神经网络的一组权值和阈值,通过QPSO算法的不断迭代和搜索,使粒子适应度值在终止条件下趋于最小,从而寻找到粒子最优位置向量,即为BP神经网络的最优权值和阈值,可用于神经网络的拟合计算,提高收敛效率和精度。量子粒子群BP神经网络算法基本流程如图1所示。
量子粒子群BP神经网络算法具体实现方法及步骤如下:
(1) 初始化粒子群参数,包括粒子位置(粒子位置即为待优化网络权值和阈值)、寻优范围、压缩扩张因子、迭代次数等。
(2) 计算种群中每个粒子适应度值,获取每个粒子的个体最优位置和粒子群的全局最优位置。
(3) 根据群体中各粒子的个体最优位置计算平均点。
(4) 通过迭代寻优对群体中每个粒子的位置进行更新。
(5) 重复步骤(2)—(4),直至达到终止条件。
(6) 输出粒子群全局最优解,作为优化后的网络最优权值和阈值,进行数据计算及分析。
本文将QPSO-BP神经网络算法的适应度函数定义为
(5)
式中,RMSE为均方根误差,代表预测数据与真实数据间的偏离程度;θ=1,2,…,L,L为训练样本数量;z(θ)和z*(θ)分别表示真实数据和预测数据。
4 试验分析
本文选取某市40个GNSS控制点成果数据(X,Y,h)作为样本进行仿真试验,以控制点坐标成果X、Y作为2个输入神经元,控制点水准高h作为1个输出神经元,隐含层设置为7个神经元[8-9],其中25个样本数据进行QPSO-BP神经网络算法优化与训练,其余15个样本数据进行数据计算与分析。
仿真试验中分别使用PSO算法、QPSO算法对BP神经网络进行了优化。其中,PSO算法参数设置为[10-12]粒子数20,c1=c2,w=0.9,迭代次数500次;QPSO算法参数设置为粒子数20,迭代次数500次,z=0.8。
通过PSO算法、QPSO算法对BP神经网络进行优化后,可得到其网络模型的29个最优权值和阈值。由于篇幅有限,本文仅给出QPSO算法优化得到的最优解,见表1。

表1 QPSO算法优化得到的最优权值和阈值
根据优化后得到的最优权值和阈值,分别构建PSO-BP神经网络、QPSO-BP神经网络,利用25组样本数据进行网络训练,再使用训练后的神经网络模型对剩余15组样本数据进行数学模拟计算[13]。由于篇幅有限,这里只给出QPSO-BP神经网络的最终拟合及预测情况,见表2、表3。
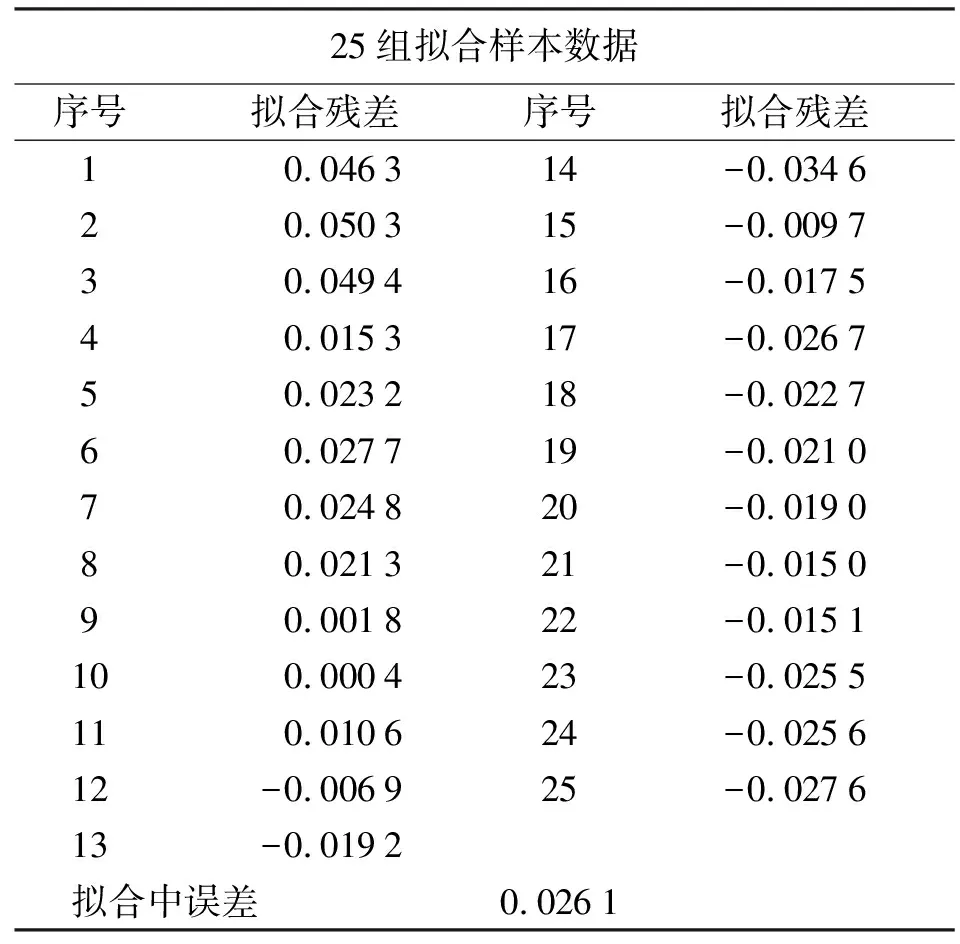
表2 QPSO-BP神经网络拟合情况 m
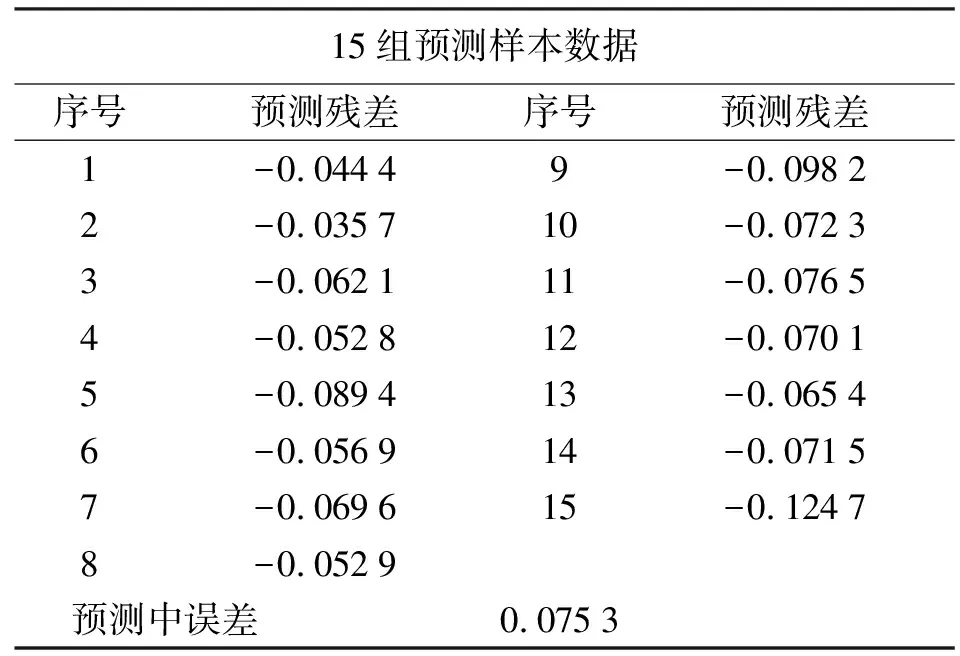
表3 QPSO-BP神经网络预测情况 m
为了更好地验证QPSO算法对BP神经网络的优化效果,本文分别对BP神经网络、PSO-BP神经网络、QPSO-BP神经网络的拟合和预测结果进行了比较分析,具体结果见表4、图2、图3。
根据上述比较分析结果可以看出:利用量子粒子群(QPSO)算法优秀的迭代进化性能和全局搜索能力[14-15],可实现对BP神经网络的有效优化,快速跳出局部最小而趋于全局最优解,最大限度避免BP神经网络收敛慢、易陷入局部最小、难以收敛到全局最优解的缺陷,大大提高GNSS高程转换的效率、精度和可靠性。
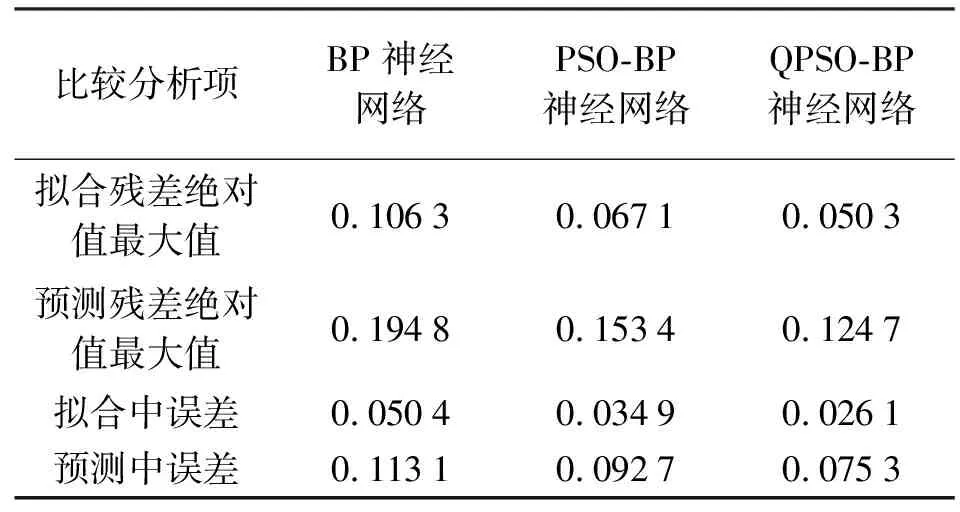
表4 BP、PSO-BP、QPSO-BP 3种算法仿真结果比较m
QPSO-BP算法在数据拟合、预测方面的精度和可靠性均优于BP模型、PSO-BP模型,是一种更加优秀的数学模型,在GNSS高程转换应用方面具有较大的推广应用潜力。
5 结 语
本文提出了一种基于量子粒子群BP神经网络算法的GNSS高程转换数学模型,利用量子粒子群算法的全局迭代进化特性搜索获取BP神经网络最优权值及阈值,有效解决了传统BP神经网络算法极易陷入局部极值、无法收敛到全局最优解等缺陷,在GNSS高程转换方面表现出了更高的效率、精度和可靠性,是一种更加快速、高效的数学模型,值得在GNSS高程转换方面进行推广应用。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中国医院院长(2022年13期)2022-08-15
成都信息工程大学学报(2022年3期)2022-07-21
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
邮电设计技术(2021年2期)2021-03-13
当代陕西(2020年23期)2021-01-07
计算机与数字工程(2019年11期)2019-11-29
现代计算机(2019年19期)2019-08-12
金桥(2018年4期)2018-09-26
