
轮椅直流无刷电机的单片机控制电路设计①
2019-02-06 04:03尹曙辉
科技创新导报 2019年26期
关键词:闭环控制
尹曙辉


摘 要:直流无刷电机控制系统因性能优越已广泛使用在电动轮椅上。使用性能优越的单片机控制系统以及采用加减速控制、速度闭环控制等主要软件算法,可以实现电机的精准平稳运行和产品极高的性价比。本系统采用STM32F405VG为核心的控制系统,通过对操纵杆和无刷电机的驱动的算法处理,结合电枢和保护参数,实现系统的“高性能、高稳定、易维护、低成本”的特点。
关键词:S加减速曲线 反电势法 单电阻采样法 闭环控制
中图分类号:TM33 文献标识码:A 文章编号:1674-098X(2019)09(b)-0121-03
1 控制器系统组成和设计方案
1.1 系统组成
如图1所示。
1.2 S曲线加减速实现
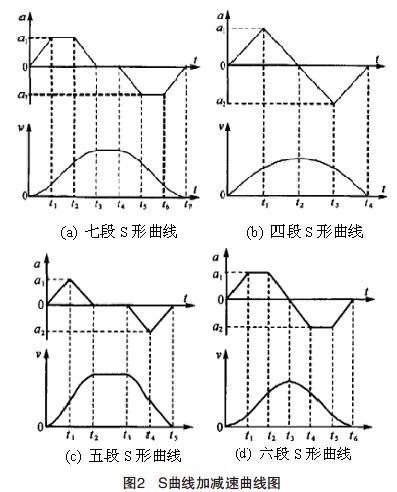
若综合操纵杆及状态生成的信号直接驱动电机,会在启动等速度变化状态引起强烈的冲击感,既不舒服又不安全,因此作适当的加减速处理,常用S曲线加减速技术实现。完整的S曲线包含7个阶段,在实际应用中,受到约束条件的影响会发生相应的变化,从而可能少于七个阶段的S曲线。S曲线如图2所示。
1.3 无刷电机驱动控制方案
1.3.1 反电势法检测转子位置原理及改进
无位置传感器检测中的反EMF方法是常用的位置检测方法[1]。由于反电势信号中会包含脉宽调制波形功率开关过程中产生的尖峰干扰,一般采用模拟低通滤波器对其进行滤波处理。但是该方式会存在产生相移的缺陷,并且相移会随运行频率的变化而变化,因此很难补偿校准。为了提高稳定性,可以这样处理:检測非导通状态绕组的端电压,并间接测量反电动势过零点的时间,从而确定换向时序。
1.3.2 单电阻采样法的缺点和解决办法
意法半导体公司对直流无刷电机驱动控制提供了专用的电机FOC驱动库,其中V3.0版本支持双马达驱动,电流采样支持单相电流采样和三相电流采样。具有单电阻电流采样的无刷直流电机(BLDCM)的控制框图如图3所示[2]。单电阻采样法存在两个缺点。首先,在相同的PWM周期中只能采样一个相电流。第二,在低调制比的情况下,3个桥臂的占空比几乎相同,7个子时间段变为3个,并且采样电阻器上的电流为零,这使得不可能进行采样[3]。
第一个问题的解决方案:在适当的时间段将3个不变桥臂的占空比插入有效矢量中。插入的有效矢量的时间 Tmin是执行电流采样所需要的最小时间,Tmin= TRise+ ADC采样时间+死区时间,TRise为任意一个MOS管开关后,ADC通道上输入信号的稳定时间。
第二个问题的解决方案:把有效矢量插入技术轮流用到A、B两相。在有效矢量插入模式中,需要补偿由PWM引起的相电流失真,如图4所示。在常规模式与边界模式进行切换时,电流的变化会被存储起来,当 PWM模式进入相同的边界区域后,通过加减消除这个变化量就可以对电流的采样值进行补偿。三对中一对PWM信号变形如图4所示。
2 电动轮椅控制器系统整体设计
控制器系统硬件框图如图5所示。系统功能模块示意图如图6所示。
2.1 模拟数据采集与滤波处理
由于传感器的模拟信号输出数值均是直流信号,采集的关键在于准确度,为了减少干扰信号对系统的采集准确度的干扰,本系统采用数字滤波算法。常用的数字滤波方法有多种,本设计采用了改进后的算术平均值算法,以克服其不适用计算速度较快的实时控制的缺陷。具体做法是:对采集的100个数值,使用快速排序算法进行从大到小的排序,然后舍弃最大的20个数值和最小的20个数值,取中间的60个数值进行平均计算。
2.2 电机运动控制功能模块
电机运动控制主要在定时器中断中完成,实现对电动轮椅两个电机的速度控制、ADC定时采样、过流保护等功能。注意定时器中断处理:(1)必须首先检测操纵杆的位置和电机运行状态。仅当操纵杆处于中心位置并且电动轮椅处于停止状态时,才能在轮椅上执行制动控制操作,否则可能损坏电动机。(2)电路中,电流信号分别以三种方式参与了系统的运行控制:电流的截止负反馈链路起到限流保护的作用;目前的正反馈补偿环节改善了机械性能;负载不平衡补偿协调了左右电机平衡。
参考文献
[1] 孙小丽,邓智泉,王骋.一种基于平均转矩控制的无刷直流电机无位置传感器方法[J].电工技术学报,2018,33(13):2905-2913.
[2] 李钰. 基于FPGA的多电机控制系统设计与实现[D].华中科技大学,2017.
[3] 周永奎. 电动汽车用内埋式永磁同步电机驱动器的研究[D].福建农林大学,2015.
猜你喜欢
山西电子技术(2023年6期)2024-01-02
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
电源技术(2017年1期)2017-03-20
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年16期)2016-04-12
电源技术(2015年11期)2015-08-22
电测与仪表(2015年3期)2015-04-09
科技与创新(2015年1期)2015-02-04
