
基于蒙特卡洛的安稳装置可靠性分析
2019-01-30 03:53:00李辰龙徐妍徐海波刘增稷谭敏刚江苏方天电力技术有限公司江苏南京国电南瑞科技股份有限公司江苏南京06东南大学电气工程学院江苏南京0096
电气自动化 2018年5期
李辰龙, 徐妍, 徐海波, 刘增稷, 谭敏刚(. 江苏方天电力技术有限公司,江苏 南京 0;. 国电南瑞科技股份有限公司,江苏 南京 06;.东南大学 电气工程学院,江苏 南京 0096)
0 引 言
安全稳定控制装置作为电网第二、三道防线,在电网中起到了不可替代的作用[1]。稳定控制装置的具体种类包括区域安全稳定控制装置、失步解列装置、频率电压控制装置和备用电源自投装置等,通常基于统一的硬件装置平台实现[2]。稳定控制装置的硬件一般由一个或多个机箱组成,其内部模块大致可分为五个部分:信号或控制输入输出单元、模拟量采集单元、中央处理计算单元、人机界面和对外通信单元[3-4]。随着智能变电站的建设,稳定控制装置已全面支持IEC61850标准。稳定控制装置是一种跨间隔设备,具有采样控制元件多、跨不同电压等级等特点,稳控装置通过SV协议从过程层合并单元采集模拟量数据,通过GOOSE协议与过程层智能操作箱、间隔层的保护装置交互开关控制信息,通过MMS协议监控站控层管理后台[5]。因此,稳定控制装置的可靠运行,对电网的安全稳定至关重要。
随着智能电网的不断发展,安全稳定控制装置也在不断升级,装置的稳定性和可靠性进一步提升,但仍然存在一些漏洞和问题[6-7]。电网的稳定依赖于稳控装置的可靠运行,因此分析稳控装置的可靠性具有重要意义。
目前引起稳控装置故障的原因主要有硬件故障、软件故障、通信故障和人为误操作,这些故障又可以分为显性故障和隐性故障,其中对电网稳定威胁较大的是隐性故障[8]。目前,对继保装置的研究较多,而对稳控装置的研究较少,并且对隐性故障的研究也刚刚起步。装置可靠性分析的方法主要有蒙特卡洛法、故障树法、重点抽样法和马尔科夫状态空间法等,有些研究将这些方法进行融合,利用各个方法的优势,总结出新的方法[9]。随着装置的功能和复杂度不断增加,一些方法的缺陷逐渐暴露出来。故障树法构造树的多余量非常繁重且难度较大,容易遗漏对系统产生重大影响的事件。马尔科夫状态空间法虽然对装置故障的预测效果较好,但不适合中长期的预测,且计算量较大。因此本文应用蒙特卡洛法分析稳控装置的稳定性。
装置的稳定性包括硬件稳定性和软件稳定性,本文以蒙特卡洛法为基础,结合南瑞SCS-500E稳控装置,提出该装置的可靠性分析方法。本文首先列举了稳控装置在实际运行中出现的故障并对这些故障进行分类。然后分析蒙特卡洛法的优势,根据装置结构和统计的故障数据建立模件失效模型,分析模件的失效率,基于蒙特卡洛法建立稳控装置的故障模型。最后通过仿真验证方法的正确性。
1 导致稳控装置故障的原因
安全稳定控制装置正常工作的条件是硬件和软件正常工作,且判据、定值和策略与电网当前的运行方式相符。安全稳定控制系统正常工作的条件是各装置布点、功能正确并能正常工作,且站间通道能正确收发数据和命令。一旦某一部分存在隐性故障,将会导致装置误动、拒动或控制措施不足、过重[10-13]。导致安全稳定控制装置故障的原因主要包括以下几种:
(1)由安全稳定控制装置硬件因素导致的故障。可能由元件失灵、老化或环境因素引起的元件损坏或不正常工作等原因引起,如装置的工作电源失效导致其输出的电压和功率不能满足装置正常运行的需要、输入部分模拟量和开关量测量回路故障、控制输出的跳闸回路故障、高温以及老化导致硬件工作异常,这些因素都可能导致装置误动或拒动。
(2)由安全稳定控制装置软件缺陷导致的故障。可能是由设计缺陷、逻辑错误等原因导致。
(3)由安全稳定控制装置判据不合理导致的故障。这种类型的隐性故障主要是由于判据本身的设置不合理,导致装置的各种元件投停判据、故障跳闸判据和无故障跳闸判据不能完全适应电网的运行特性,造成电网运行方式以及故障类型的误判。特别是具有不确定性、间歇性的新能源大规模集中接入电网后,电网的运行特性变化较快,可能导致判据不能适应电网的运行方式。
(4)由安全稳定控制装置定值不合理导致的故障。主要包括以下两种情况:①定值没有适应电网当前的运行方式,特别是当系统的运行方式发生了一些变化,而整定值却没有修改的情况,此时,即使出口回路正常运行,但定值不合理仍然会导致装置误动或拒动;②原始设置的定值适应电网当前的运行方式,但是由于存储器工作环境较恶劣或长期不间断运行等原因造成存储器中存储的定值出现错误。
(5)由安全稳定控制装置策略不合理导致的故障。这种类型的隐性故障主要是由于控制策略(包括控制措施和控制量)没有适应电网当前的运行方式,特别是大规模新能源集中接入电网后,电网的运行方式和运行特性变化较大,控制策略可能不能与电网的运行方式相匹配,此时,即使出口回路正常运行,但是策略不正确仍然会导致装置误动、拒动或控制措施不足、过重。
(6)由安全稳定控制系统站间通信通道不能正确收发数据或命令导致的故障。可能是由通信中断、延时和误码等原因导致。
(7)由安全稳定控制系统装置布点不合理或功能配置不合理导致的故障。
(8)由安全稳定控制系统与其他二次设备系统之间的配合不当导致的故障。主要包括:①安全稳定控制系统与继电保护系统(如电厂涉网保护、直流输电控制保护系统)配合不当导致的故障[14];②安全稳定控制系统与其他安全稳定控制系统之间的配合不当导致的故障等。
(9)由其他因素导致的安全稳定控制装置故障。这种故障主要包括:①现场对线路的操作与装置所要求的操作顺序不匹配,导致装置误动;②由于对安全稳定控制装置的了解不够详细和深入,导致调度指令错误;③进行安全稳定控制装置试验时缺少安全措施,导致装置误动;④装置出厂试验不彻底、装置到达现场后调试不足以及投运后运行管理不足造成的隐患等。
2 蒙特卡洛法分析装置可靠性
蒙特卡洛法是一种随机模拟方法,以概率和统计理论为基础,使用随机数解决计算问题的方法。将所求解的问题与一定的概率模型相联系,用计算机实现统计模拟或抽样,以获得问题的近似解。
稳控装置可靠性分析较为复杂,稳控装置为分布式结构,一个装置由多个机箱组成,每个机箱由多个模件组成,每个模件可能出现的故障多种多样,问题的维数可能高达数百甚至数千。在分析该问题时,难度随维数的增加呈指数增长,而蒙特卡洛法的复杂性不依赖于维数,因此相比于马尔科夫状态空间法等传统的数值方法,蒙特卡洛法有其自身的优势。
2.1 模件失效率
装置的稳定性可以用失效率这个参数来衡量,失效率是工作到某时刻尚未失效的产品,在该时刻后单位时间内发生失效的概率。失效率用λ表示。稳控装置的各个模件由大量电子元器件组成,元器件的失效率计算较为复杂,需要的参数较多,如基本失效率、环境系数和温度系数等,电容需要考虑电容量系数,电感需要考虑电压应力系数、集成电路需要考虑电路复杂度,因此对单个元器件建立精确的概率模型较复杂。本文根据《MIL-HDBK-217F》,利用元器件的已知属性计算各个元器件的失效率λh。稳控装置各个模件的软件系统由多个软件模块组成,当一个软件模块失效时则认为该模件的软件系统失效。本文根据软件的复杂度计算得到软件模块失效率λs。因此稳控装置模件失效率如式(1)所示。
(1)
式中:λb为模件失效率;λhi为元器件i的失效率;m为元器件数量;λsi为软件模块i的失效率;n为软件模块数量。
考虑到每个元器件对于模件的重要程度不同,例如某个小电容的失效可能不会影响模件的功能,而某个芯片的失效可能会导致模件失效,为表示元器件的重要程度,引入系数α,α∈(0,1)。修正后的装置模件失效率如式(2)所示。
(2)
式中:αhi为元器件i对于模件稳定运行的重要程度;αsi为软件模块i对于模件稳定运行的重要程度。
根据模件间的逻辑关系,可以得到稳控装置的失效率为:
(3)
式中:λM为装置失效率;λbi为第i个模件的失效率;k为模件数量。
2.2 装置失效模型
本文利用蒙特卡罗法评估装置的可靠性,首先对系统内各个模件的状态进行抽样,包括主控模件、开入模件、开出模件、电源模件、通信模件和人机接口模件等。对于系统中任一模件,用λbi表示其失效率,Xi表示系统的状态,1代表系统故障,0代表正常运行,R为区间[0,1]上均匀分布的随机数,则Xi的表达式为:
(4)
稳控装置的故障可以分为显性故障和隐性故障,显性故障指能够被装置自检发现的故障,隐性故障指不能被装置自检发现的故障,当装置处于隐性故障状态时,受到外部触发,装置发生拒动或误动,进入显性故障状态。对于电网稳定而言,只要装置不发生误动或拒动,则认为处于正常运行状态。因此定义触发条件C和触发率η,则模件i的触发条件Ci的表达式如下:
(5)
修正后的故障状态为:
(6)
Xi*的概率函数P的表达式为:
(7)
一个装置包含m个模件,则X*=(X1*,X2*,…,Xm*),当各个模件故障相互独立时,装置故障的概率函数为:
(8)
3 算例分析
3.1 原始数据
本文仅考虑装置处于偶然失效期,根据SCS-500E的浴盆曲线,此时各个模件的失效率为常数。取元器件质量系数为0.25,生产工艺成熟系数为1,环境系数为2.5,运行温度40 ℃。根据以上参数计算得到装置各模件的失效率如表1所示,各模件的触发概率η如表2所示。
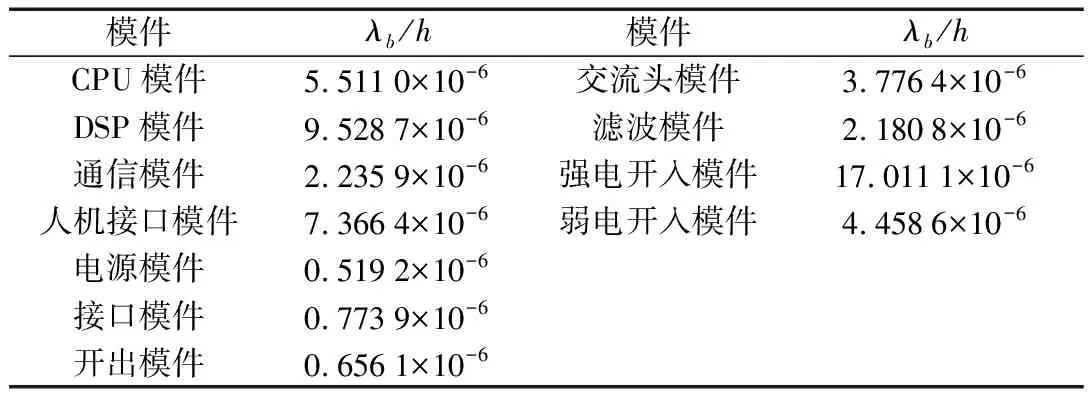
表1 SCS-500E各模件失效率
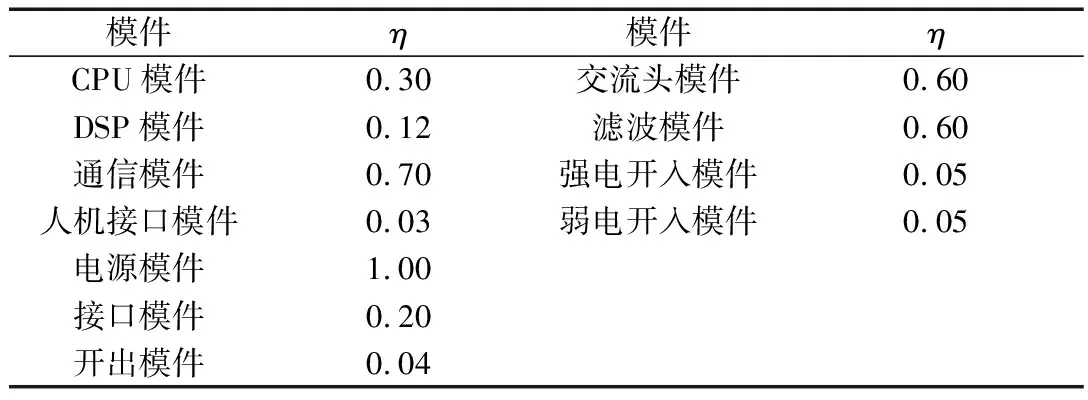
表2 SCS-500E各模件触发概率
3.2 故障概率计算
本算例取采样点数500 000个,在一年内,稳控装置各个模件处于显性故障状态的概率如表3所示。

表3 SCS-500E各模件显性故障概率
考虑隐性故障,稳控装置各模件的故障概率如表4所示。
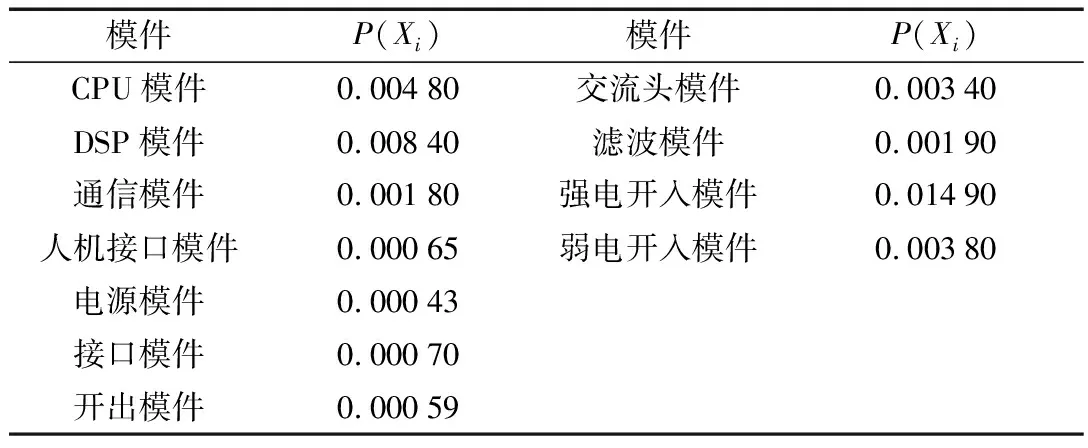
表4 SCS-500E各模件实际故障概率
由表3和表4数据可以得到稳控装置正常运行、出现显性故障和实际出现故障的概率,如表5所示。

表5 SCS-500E各状态概率
由表5可知,安全稳定控制装置出现故障的概率很小,并且电网中一般有两套以上不同原理的稳控装置同时工作,所以由稳控装置故障导致系统停运的概率非常小。稳控装置实际出现故障的概率要比出现显性故障的概率高很多,装置处于隐性故障状态时若没有外部条件触发,装置将一直运行。实际运行中,若装置没有出现拒动或误动,则认为装置处于正常运行状态,此时装置可能处于隐性故障状态而没有被触发,因此稳控装置处于正常运行状态的概率要略低于统计值。表5的计算结果与实际相符,证明本文评估安全稳定控制装置可靠性的方法是正确的。
4 结束语
安全稳定控制装置的硬件系统与软件系统组成较为复杂,目前装置内部在线自检能力有限,很多故障以及一些误操作无法自动检测并采取措施,稳控装置的拒动与误动将影响电力系统的稳定运行。本文首先列举了稳控装置实际运行中出现的故障,根据装置结构和统计数据建立模件失效模型,之后利用蒙特卡洛法计算装置的故障概率,并通过算例验证了方法的正确性。根据本文分析,安全稳定控制装置的可靠性非常高。本文通过蒙特卡罗法计算得到装置的故障概率,可以为装置设计与控制策略的选取提供参考。本文仅考虑了单个装置的可靠性,多个地区的稳控装置配合问题也可能导致装置的误动或拒动,未来应考虑稳控装置间的协调和通信问题对装置可靠性的影响。
猜你喜欢
化工管理(2023年17期)2023-06-16 05:56:54
设备管理与维修(2022年21期)2022-12-28 07:34:24
数学物理学报(2022年2期)2022-04-26 14:08:46
装备制造技术(2021年5期)2021-08-14 01:44:44
小哥白尼(趣味科学)(2020年6期)2020-05-22 06:43:14
计算机与数字工程(2019年7期)2019-07-31 09:55:10
统计与决策(2017年2期)2017-03-20 15:25:27
通信电源技术(2016年1期)2016-04-16 04:57:39
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:24
综合智慧能源(2015年4期)2015-06-05 14:56:55
