网络化电机同步的改进型交叉耦合预测控制
2019-01-17 06:14周颖孙超王冬生戴俊翔
电机与控制学报 2019年12期
周颖 孙超 王冬生 戴俊翔
摘 要:针对网络环境下的电机同步控制系统,基于改进型交叉耦合结构,设计多变量快速广义预测控制器,实现了网络化的多电机比例同步控制。首先将被控对象建模为多变量CARIMA模型。然后基于改进型交叉耦合结构,根据当前电机的前后两台电机比例同步误差,定义控制器目标函数,提出了多变量快速广义预测控制算法。该广义预测控制算法避免了在线求解丢番图方程,在具有随机时延及干扰的环境下,实现了多电机的比例同步控制。最后,仿真结果表明了所提控制方法的可行性和有效性。
关键词:多电机比例同步;网络控制系统;快速广义预测控制;交叉耦合
DOI:10.15938/j.emc.(编辑填写)
中图分类号:TP271.4文献标志码:A文章编号:1007-449X(2017)00-0000-00(编辑填写)
Abstract:For the synchronization control system of multi-motorunder networkenvironment,the multivariable fast generalized predictive control algorithm was proposed based on the improved cross-coupling structure and thenetworkedproportional synchronous control of multi-motor was realized.At first the controlled system was modelled as CARIMA. Then a cost function was defined and a generalized predictive control algorithm was put forward based on the cross-coupling structure and the synchronization error of two adjacent motors. The computation of Diophantus Equation was avoided and the proportionsynchronization control of multi-motorwas realized under network environment with random delay and disturbance. At last the simulation results showedthe feasibility and effectiveness of the proposed control method.
Keywords: multi-motor proportional synchronization; networked control system; fast generalized predictive control; cross coupling
0 引言
近年來,随着网络化程度的提高,更多的控制系统引入了网络,成为一种拥有完整的通信网络、远程式的控制系统的闭环控制系统,网络控制系统(network control systems, NCSs)应运而生。网络的引入带来方便的同时,也产生了一系列问题,尤其是网络中诱导时延的产生严重影响了系统的控制性能[1]。随着控制要求的不断提高,控制的复杂程度在不断加大,尤其是大型机械需要多台电机同步驱动,因此对于多台电机的同步控制,国内外专家进行了大量的研究[2-11]。文献[2]实现了基于交叉耦合控制结构的多轴高精度定位学习系统,解决了同步时精度差的问题;文献[3]基于多线切割机的应用,将自适应控制与交叉耦合结构结合在一起,提出一种无模型的自适应交叉耦合控制结构,提高了多线切割机的多轴同步精度;文献[4]基于线性系统校正原理设计了改进型偏差耦合控制结构,实现了多电机系统的同步性能与跟踪性能的解耦调节;文献[5,6]在交叉耦合结构基础上进行了改进,提出了一种偏差耦合结构,其思想是将某一电机转速分别与系统中内的其他电机转速作差,然后将偏差转速之和作为转速补偿信号,达到抑制同步协调转速误差的效果,使之可以同步控制两台以上电机;文献[7]基于偏差耦合控制结构对永磁同步电机实现了同步协调控制;文献[8]对偏差耦合结构进行了改进,只考虑前后两台电机的影响,提出了相邻交差耦合结构,简化了控制系统的结构;但此方法只能应用于模型准确且线性的同步电机控制[9-11],没有解决电机的比例同步控制问题;文献[12]在相邻交叉耦合的基础上改进了算法,设计了模糊PID控制器,对非线性、时变等系统具有较好的控制效果,实现了多电机的比例同步控制,但该结构在干扰大,电机多的情况下可能会使系统不稳定。
目前,大多数已有成果只限于对本地多电机进行同步控制,鲜有对网络环境下的电机同步控制进行研究。针对前面所提到的问题,本文针对网络环境下电机同步问题,将广义预测控制与改进型交叉耦合结构结合在一起,设计了一种多输入多输出的广义预测电机同步控制器。本文提出的广义预测控制算法适用于网络环境下的多电机同步控制或比例同步控制,控制器结构简单、鲁棒性强、对模型的依赖程度低,既可以解决引入网络带来的时延问题,也进一步改善了电机同步控制系统的结构、移植、扩展等问题。仿真结果表明本文所提算法可以在具有随机时延及干扰的网络环境下仍然能够快速且稳定地进行多电机比例同步运行,取得理想的同步控制性能。
1 网络环境下的改进型相邻交叉耦合结构
1.1 相邻交叉耦合结构[13]
相邻交叉耦合结构是基于最小相关轴数目的控制结构,即每一轴的控制都考虑到至少附加2个其它相关轴的状态。因此可以实现大于2台电机的同步控制,且单个负载出现波动时,整个同步电机系统都会响应。
较之一般的广义预测控制算法,本文使用的快速多变量广义预测控制器,使整个比例同步电机控制系统的控制器数量降低至1个,极大降低了成本;也使得在进行多电机比例同步控制时,减少了布线的难度,使得日后易于维修,扩展;在进行预测计算时,省略了计算丢番图方程,节省了大量的计算时间,实时性得到增强。
3 仿真
为了验证本文提出的改进型交叉耦合以及多变量广义预测控制器的有效性,选取4台无刷直流电机作为被控对象来进行仿真实验[16],假设这4台电机位于一个短时延的网络环境下。
四台电机的CARIMA模型如下:
设定转速在起始位置为1000r/min,在200步时下降为0,在400步后重复前一个周期。设置控制器柔化因子 ,权重 。当要求全部电机跟随同一设定轨迹进行同步控制,即 时,仿真结果如下图3、图4所示。其中图3为同步控制时,各电机的控制输出转速。图4(a),(b)分别表示各电机之间的输出转速误差。
仿真结果表明,本文提出算法可以很好的实现多电机同步任务,收敛性、稳定性好,电机之间的输出转速误差小,并且可以补偿引入网络所带来的时延问题。
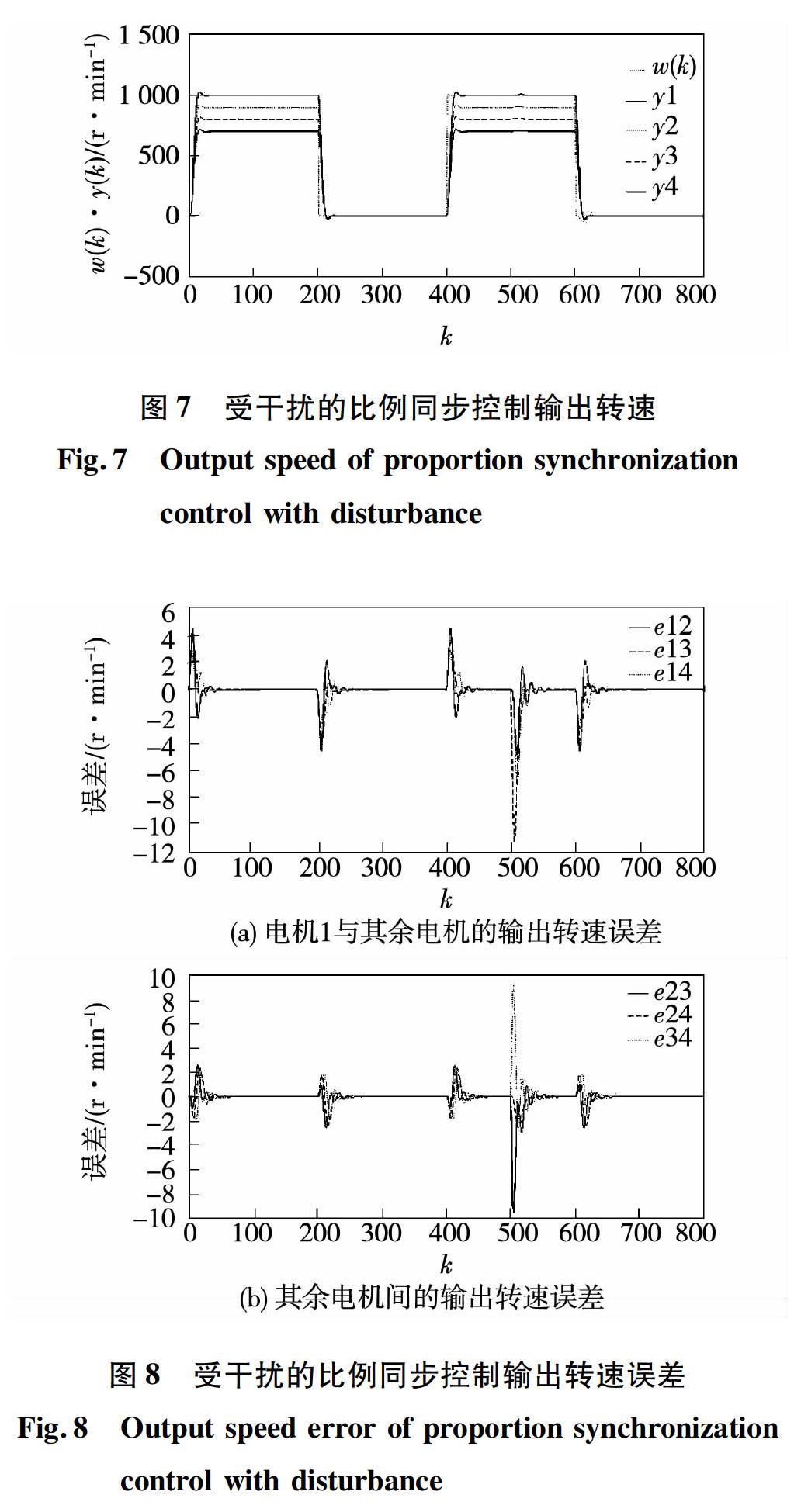
当要求电机按照一定比例进行同步比例运行,选取 ,仿真结果如图5、图6所示。图5为在进行比例同步电机控制时,各电机之间的输出转速与设定值之间的关系,图6(a),(b)分别表示了各电机之间的在进行比例同步控制时的输出转速误差。
仿真结果表明,本文提出的算法可以实现多电机的比例同步控制,且比例同步误差小,并未因比例系数的改变增大误差。
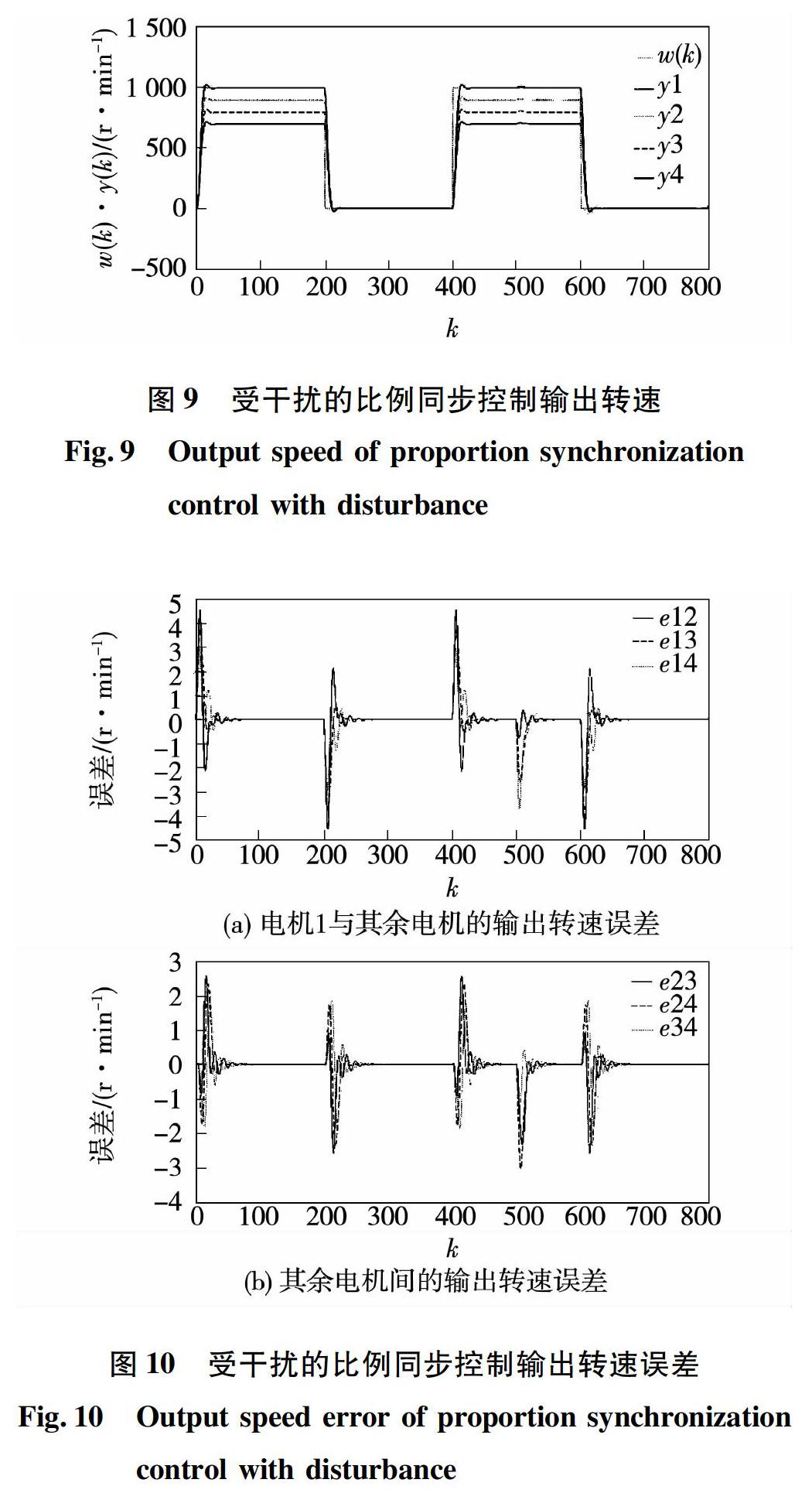
当第三台电机在500步时受到噪声干扰,其比例同步控制的各电机输出转速如图7所示。图8(a),(b)分别表示了各电机之间的在进行比例同步控制时的输出转速误差。
仿真结果表明,当单一电机受到干扰时,其余电机也会响应这个干扰,达到同步控制的目的,虽然会短暂引起各个电机之间的转速误差增大的情况,但经过很短的时间内,各电机的输出恢复稳定。
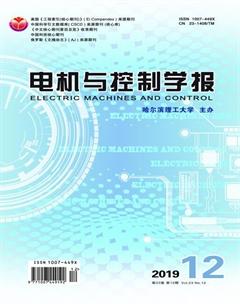
当四台电机同时在500步时受到的等幅干扰时,其比例同步控制的各电机输出转速如图9所示。图10(a),(b)分别表示了各电机之间的在进行比例同步控制时的输出误差。
仿真结果表明,当全部电机受到干扰时,各电机之间的输出转速误差不会增大,且经过很短的时间内,各电机的输出恢复稳定。
通过仿真可以看到,本文所提出的改进型交叉耦合结构与多变量广义预测算法结合的控制方法,适用于网络环境下的多电机同步与多电机比例同步控制。在某个电机或多个电机受到干扰,系统中存在随机时延等问题下,仍然能够以快速且稳定地进行比例同步运行,具有一般控制方法不具备的能力,表明该同步控制算法具有理想的同步性能和实际应用价值。
4 总结
本文研究了网络环境下多电机的比例同步控制问题。改进了交叉耦合結构,结合多变量的广义预测控制器,使得整个系统只存在一个控制器,从而降低了电机扩展、维修、布线的难度。算法中考虑了引入网络所带来的随机时延和干扰的问题,所使用的广义预测控制算法结构简单、计算速度快、鲁棒性强。该算法对电机运动过程中出现时变性问题也没有严格要求,具有较好的比例同步控制效果。
参考文献:
[1] 田中大,李树江,王艳红.基于隐式PIGPC的网络控制系统时延补偿方法[J].电机与控制学报, 2016, 20(11): 77-85.
TIAN Zhongda, LI Shujiang, WANG Yanhong. Implicit PIGPC compensation method for time-delayin networked control system[J].Electric Machinesand Control,2016, 20(11): 77-85.
[2] 蒋近,戴瑜兴,郜克存,彭思齐. 多线切割机的无模型自适应交叉耦合控制[J]. 控制工程,2012,19(1):33-35+52.
JIANG Jin, Dai Yuxing, Gao Kecun, PENG Siqi. Model-free Adaptive Cross Coupling Control of Multi-wire Saw[J]. Control Engineering of China, 2012,19(1):33-35+52.
[3] 张团善,潘铜,叶小荣,张娜. 基于交叉耦合的平网印花机同步控制器的设计[J]. 电子测量技术,2010,33(7):15-18.
ZHANG Tuanshan,PAN Tong,Ye Xiaorong,ZHANG Na. Design of flat screen printing asynchronic controller based on cross coupled control [J]. Electronic Measurement Technology,2010,33(7):15-18.
[4] 耿强, 王少炜,周湛清, 等. 改进型偏差耦合多电机转速同步控制[J].电工技术学报,2019, 34(3):474-482.
GENG Qiang, WANG Shaowei, ZHOU Zhanqing, et al.Multi-motor speed synchronous control based on improved relative coupling structure[J].Transactions of China Electrotechnical Society, 2019, 34(3):474-482.
[5] PEREZ-PINAL F J, CALDERON G, ARAUJO-VARGASI. Relative coupling strategy[C]//IEEE International Electric Machines and Drives Conference(IEMDC'03), 2003IEEE, Madison, USA, 2003:1162-1166.
[6] 苗新刚,汪苏,韩凌攀,万本庭.基于偏差耦合的多电机单神经元同步控制[J]. 微电机,2011,44(2):44-47.
MIAO Xingang, WANG Su, HAN Lingpan, WAN Benting.Single neuron PID synchronization control strategy in multi-motor systems based on the relative coupling control[J]. Micromotors,2011, 44(2):44-47.
[7] Shih Y T, Chen C S, Lee A C. A novel cross-coupling control design for Bi-axis motion[J]. International Journal of Machine Tools & Manufacture, 2002, 42(14):1539-1548.
[8] 曹玲芝,李春文,牛超,趙德宗,魏尚北. 基于相邻交叉耦合的多感应电机滑模同步控制[J]. 电机与控制学报,2008, 12(5):586-592.
CAO Lingzhi, LI Chunwen, NIU Chao, ZHAO Dezong, WEI Shangbei. Synchronized sliding-mode control for multi-induction motors based on adjacent cross-coupling[J]. Electric Machines and Control, 2008, 12(5):586-592.
[9] 李春文,赵德宗,任军. 基于全滑模面的多感应电机速度同步控制[J]. 系统工程理论与实践,2009, 29(10):110-117.
LI Chunwen, ZHAO Dezong, REN Jun. Total sliding mode speed synchronization control of multi induction motors [J]. Systems Engineering–Theory & Practice, 2009, 29(10):110-117.
[10] PENG Weifa, ZHAO Dezong. Speed synchronization of multi induction motors with total sliding mode control[C]//Asia-Pacific Power and Energy Engineering Conference(APPEEC 2010), 28-31 March, 2010 IEEE Computer Society, Chengdu, China, 2010:1-9.
[11] 薛建峰,王景芹,杨昭. 多感应电机相邻交叉耦合快速终端滑模同步控制[J]. 包装工程,2017,38(7):173-177.
XUN Jianfeng, WANG Jingqin, YANG Zhao.Synchronous control of adjacent cross coupling fast terminal Sliding-mode control for multi induction motor[J]. Packaging Engineering,2017, 38(7):173-177.
[12] 胥小勇,孙宇,蒋清海. 改进型相邻耦合结构的多电机比例同步控制[J]. 仪器仪表学报,2012,33(6):1254-1260.
XU Xiaoyong, SUN Yu, JIANG Qinghai.Improved adjacent cross-coupling control structure for multi-motor proportional synchronization control [J]. Chinese Journal of Scientific Instrument,2012,33(6):1254-1260.
[13] TIAN Zhongda, LI Shujiang, WANG Yanhong. Coke oven flue temperature control based on improved implicit generalized predictive control [J]. Journal of Advanced Computational Intelligence Informatics, 2018, 22(2): 203-213.
[14] SUN Chao, ZHOU Ying, DAI Junxiang, LIN Jinxing. Networked control system time delay compensation based on improved implicit GPC[C]// In Proceedings of the36th Chinese Control Conference(CCC), 26-28 July 2017 IEEE. Dalian, China, 2017, 4562-4566.
[15] 庞中华,金元郁. 一种广义预测控制的快速算法[J]. 自动化技术与应用,2005, 24(3):6-8.
PANG Zhonghua, JIN Yuanyu.A fast algorithm for generalized predictive control[J]. Techniques of Automation & Applications,2005, 24(3):6-8.
[16] 谭浩然. 网络化多电机同步协调预测控制研究[D].中南大学,2014.