开关磁阻电机转矩脉动抑制技术
2019-01-17 06:14周凯石增孙东阳耿新
电机与控制学报 2019年12期
周凯 石增 孙东阳 耿新

摘 要:开关磁阻电机的转矩脉动可以用直接转矩控制技术进行有效抑制。开关磁阻电机双凸结构和磁路的严重饱和所造成的严重非线性,使其固定参数在常规控制下不能很好适应工况变化且转矩脉动较大。针对这一问题,提出一种采用基于模糊PI建立开关磁阻电机直接转矩模型的方法来提高系统动态响应,并抑制转矩脉动。通过精确建立开关磁阻电机的非线性模型,使用有限元仿真软件分别计算出电机的磁链、电感和转矩的静态特性,并以此搭建了开关磁阻调速系统的非线性数学模型。仿真与实验结果表明,该调速系统具有良好的动、静态性能,改善了转矩失控现象,有效降低了转矩脉动,同时提高了控制系统稳定性。
关键词:开关磁阻电机;模糊PI控制;直接转矩控制;转矩脉动抑制
DOI:10.15938/j.emc.2019.12.
中图分类号:TM352 文献标志码:A 文章编号:1007 -449X(2019)12-0000-00(编辑填写)
Abstract: The torque ripple of switched reluctance motor can be effectively suppressed by direct torque controltechnique. Since the serious nonlinearity which caused by the doubly salient structure and the severe saturation of the magnetic circuit of the switched reluctance motor, the fixed parameters cant adapt to the change of the working conditions and the torque ripple is relatively large. To solve this problem, a new method based on fuzzy PI is proposed to improve the dynamic response of the switched reluctance motor and restrain torque ripple. By establishing the nonlinear model of switched reluctance motor and using the finite element simulation software, the flux linkage of motor, the static characteristics of inductance and torque were calculated.The simulation and experiment results show that the system has good dynamic and static performance.It can Improve torque run away phenomenon and reduce the torque ripple effectively. The stability of the control system is also improved.
Keywords: switched reluctance motor; fuzzy PI; direct torque control; torque ripple reduction
0 引言
开关磁阻电机SRM(Switched Reluctance Motor)作为一种新型的机电一体化调速电机,在吸取传统电机优点的同时发展了自己的特点,结构简单坚固、可靠性高、制造成本低、容错能力强。
開关磁阻电机调速系统(SRD)兼有直流调速系统的控制电路简单、调速性能良好、高效率的特点和交流变频调速系统电机坚固耐用、结构简单的特点,是一种性价比较高的调速系统[1-3]。
然而,开关磁阻电机本体因双凸结构和磁路的严重饱和造成的严重非线性及变参数、变结构,使得常规固定参数的PI控制策略难以得到理想的控制性能。而且控制参数因为没有确切的数学模型而难以确定。改造电机本体和采用先进的电机控制策略都可以有效地抑制SRM转矩脉动。目前开关磁阻电机建模方法有很多,例如线性建模法、准线性建模法、有限元法、函数解析法、表格插值法、神经网络法、支持向量机法等,这些方法可以在电机本体设计中降低转矩脉动。转矩脉动抑制方法更多的体现在控制策略上,目前,国内外学者在此领域的控制策略上取得了众多成果,比较典型的是神经网络,智能控制等。这些控制策略是采用控制器引入具有参数自整定能力的非线性控制方法来解决参数整定的问题[4-6]。由于SRM具有高度非线性,神经网络控制系统需根据SRM的转矩和电流以及转矩和转子位置角的关系,对电机的内部机理进行提前学习。虽然通过这种方式能很好的抑制电机的转矩脉动,但是该策略学习速度有限,难以随着电机的高速运转来对电机进行实时调节。而本文采用的模糊控制系统不依赖于电机内部参数,能够很好的适应各类电机特性及变化,对于转子位置角的反馈误差能做到及时补偿,即使电机处于高速运转状态,也可以准确的对电机进行实时调节,鲁棒性极强。
本文通过使用有限元计算和仿真,获取电机的磁场分部、转矩大小、磁链值和电感等参数,并基于此建立了开关磁阻调速系统的非线性数学模型。
在控制策略上,速度调节器上采用模糊控制,可以在线整定PI控制器的参数,并与直接转矩控制策略相结合来抑制转矩脉动[7]。
文中阐述了直接转矩控制需要优化的方面,并通过分析模糊控制器和PI控制器功能来说明需要在原模型上加入模糊PI控制器的必要性。通过仿真实验分析,来验证本文提出加入模糊PI控制器的原因。
搭建开关磁阻电机实验平台,合理设计系统的软件部分和硬件部分,测量调试后的实验波形,将波形与仿真波形比较,验证控制策略的合理性。
1 开关磁阻电机非线性建模
在深入研究开关磁阻电机的电压平衡方程和机械方程的基础上,搭建了电机非线性模型 [8,9]。
对开关磁阻电机的磁场分布、电流-磁链-角度、电流-转矩-角度、电流-电感-角度等静态特性参数进行仿真和计算。收敛速度与网络剖分的选取有关,需要选择合适的网络剖分来尽可能的减少计算时间。三角元作为网格剖分单位,可以满足网络剖分的合法性、相容性、逼近精确性、良好的单元形状、良好的剖分过渡性和自适应性。本模型选择的网络剖分为三角元,三角形剖分密度在气隙处较大,在其它地方密度较低,如图1所示。
为了直观的看出开关磁阻电机的各种静态特性,基于有限元的仿真结果,将电机的磁链、转矩和电感通过计算和数据拟合,以图像的形式呈现出来。如图2所示。
图2为开关磁阻电机的静态磁链特性曲线图,该图体现出磁链与电流和转子角度的关系。该数据为控制系统中的磁链估算提供了依据。图3为静态磁链的3D曲线图。
图4为开关磁阻电机的静态转矩特性曲线图,该图体现出转矩与电流和转子角度的关系。该数据为控制系统中的转矩估算提供了依据。
2 开关磁阻电机控制策略
2.1 直接转矩控制
直接转矩控制(DTC)其基本思想是通过检测电机电流和电压,通过相关公式推算出电机磁链和瞬时转矩的值,将检测到的磁链和转矩与系统给定值进行差值滞环比较,实现电机磁链和转矩的实时跟踪给定值,这种方法简单直接,不受简化的公式影响,仅决定于电机转矩的实际值[10,11]。
图6为直接转矩控制原理框图,本文采用的是外环为速度环,内环为转矩环的复合控制方法[8]。直接转矩控制控制过程为:系统给定一个参考速度ω和参考磁链Ψ,参考速度与电机实时速度做差,速度差值作为期望转矩Tref,Tref与电机的实时转矩做差,其差值与磁链差值分别经过滞环单元处理后,两个差值与磁链的空间角一起决定开关表的输出状态进而控制功率变换器上开关元件的通断状态。磁链和转矩值都为闭环控制,在整个控制过程它们的幅值会一直保持稳定,从而达到了抑制转动脉动的目的。
因为调速系统中加入了滞环单元,使得磁链和转矩的误差范围只能维持在一个相当小的范围内,对系统的控制有一个明显的延迟作用。当转矩负载或给定的磁链发生变化时,系统不能及时的更改电压矢量的状态值,而是依然维持在当前的状态值,这将会使转子速度和电机转矩的值在直角坐标系下上下抖动,不利于电机的稳定运行。针对这一问题,在直接转矩控制系统上引入模糊PI控制器来提高系统动态性能。
2.2 模糊PI控制器的设计
采用二维模糊PI控制器对速度进行调节,如图7所示。输入变量为电机实时速度与速度给定值的偏差e和偏差变化量ec,因为要控制转矩环的转矩值,所以输出变量为期望转矩值T*。
模糊语言规则是人工经验总结出来的,关于开关磁阻电机调速系统的模糊语言规则可以描述如下:
(1) 当电机实时转速大于速度给定值时,模糊控制器的输出,即期望转矩值要减小。转速偏差越小,期望转矩减小的幅度越大。
(2) 当电机实时转速等于速度给定值时,期望转矩值保持不变。
(3) 当电机实时转速小于速度给定值时,期望转矩要增加。转速偏差越大,期望转矩增加幅度要越大。
结合以上模糊语言规则和E、EU、U的隶属函数,可以列出模糊控制规则表,如表1所示。
3 控制系统建模仿真
根据式(1)和有限元计算的磁链 和转矩Te与电流i和位置角θ对应关系的数据表,可以搭建出电机本体模型,如图9所示。图9中两个Lookup模块是采用查表法,将计算的磁链和转矩数据导入模块中来查表操作。图9为电机A相的模型,由于开关磁阻电机具有对称性,所以三相建模可以用A相来代表,唯一不同是Embedded MATLAB Function模塊,将输入电机原始转子位置转换成归算后的角度,再进行查表法运行操作。
基于图9,根据式(4)可建立电机本体模型,如图10所示。其中theta change模块将电机角度周期设定为45度。
基于电机本体模型,建立如图11所示的模糊PI的直接转矩控制系统。系统主要包括12/8极的电机本体、功率变换器、磁链估算与转换模块、磁链扇区判定模块、开关表模块和PI控制模块。其中12/8极电机本体是图10所生成的库。该模型的参数分别为:额定功率P=3kW,额定电压V=514,绕组电阻Rs=2.47Ω,转动惯量J=0.05kg·m2,阻尼系数F=0.02n·m/rad/s。
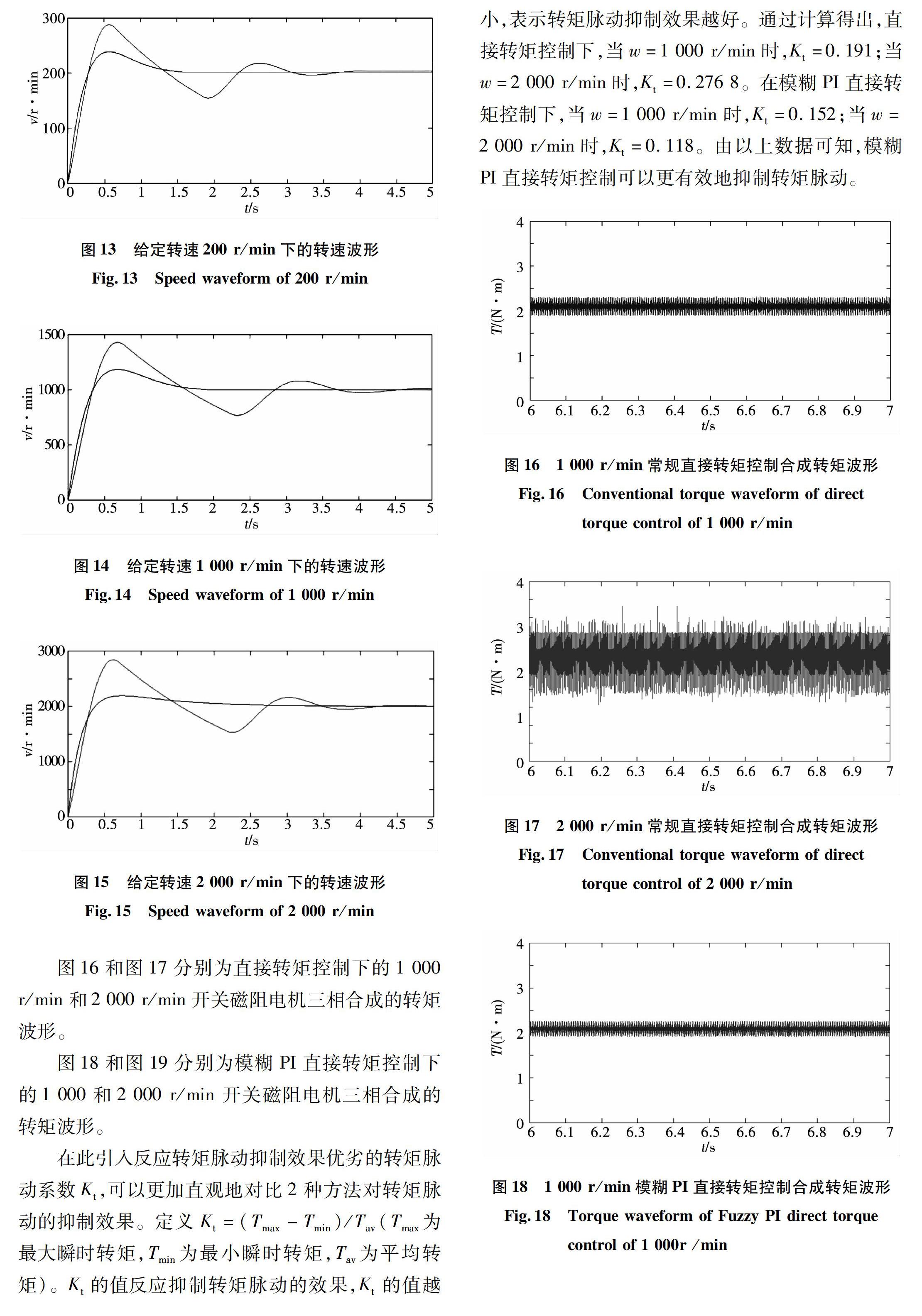
图12-15分别是在给定转速为100r/min、200r/min、1000r/min和2000r/min下的电机转速波形,图中波动较大的曲线为文献[10]所使用的直接转矩控制下的转速波形,波动较小的曲线为模糊PI直接转矩控制系统下转速波形。由图可知,模糊PI直接转矩控制策略对电机转速的控制效果更好。
图16和图17分别为直接转矩控制下的1000r/min 和2000r/min开关磁阻电机三相相合成的转矩波形。
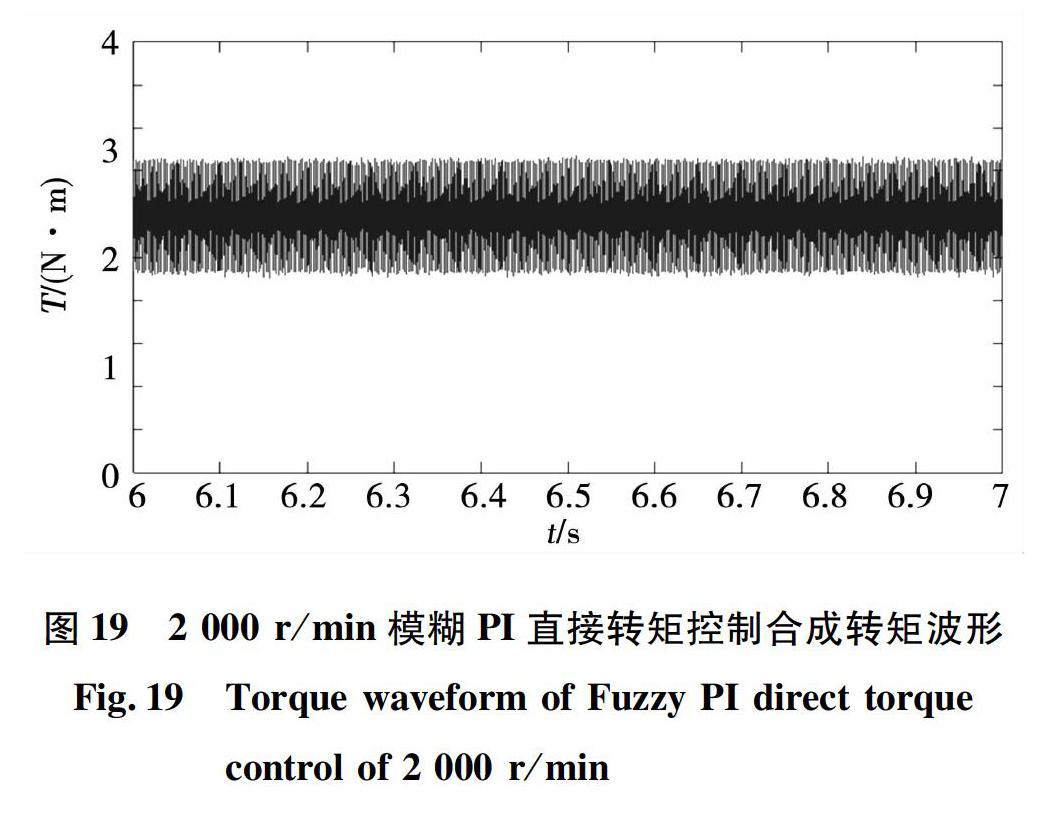
图18和图19分别为模糊PI直接转矩控制下的1000r/min 和2000r/min 开关磁阻电机三相合成的转矩波形。
在此引入反应转矩脉动抑制效果优劣的转矩脉动系数Kt,可以更加直观地对比两种方法对转矩脉动的抑制效果。定义Kt= (Tmax-Tmin)/Tav (Tmax为最大瞬时转矩,Tmin为最小瞬时转矩,Tav为平均转矩)。Kt的值反应抑制转矩脉动的效果,Kt的值越小,表示转矩脉动抑制效果越好。通过计算得出,直接转矩控制下,当w=1000r/min时,Kt=0.191;当w=2000r/min时,Kt=0.2768。在模糊PI直接转矩控制下,当 w=1000r/min时,Kt=0.152;当 w=2000r/min时,Kt=0.118。由以上数据可知,模糊PI直接转矩控制可以更有效地抑制转矩脉动。
在无负载转矩时运行时,运行到0.15s时,两种系统都加入12N·m的负载转矩,观察系统的动态特性,如图20所示。
通过对两种控制策略下的转速波形、转矩波形和负载突变时的转矩波形的对比,可以清晰的看出,基于模糊PI的直接转矩控制策略的动静态特性和抑制转矩脉动效果更好。
4 实验结果分析
为了验证所提策略的有效性和可行性,本文分别对开关磁阻电机工作在额定状态3kW以及轻载状态0.5kW时进行了相同的实验。如图21和图22所示,将电机转速从1000r/min突然加到1500r/min时,模糊PI直接转矩控制策略不仅有效地抑制电机转矩脉动,而且具有很好的动态响应。
5 结论
本文采用基于模糊PI的开关磁阻电机直接转矩控制策略,并分别介绍了直接转矩与模糊PI的原理。设计了直接转矩控制模块和速度控制器模块,建立了相应的仿真模型。通过对模糊PI直接转矩控制与常规PI直接转矩控制生出的波形进行对比,可以看出模糊PI直接转矩控制策略能够更有效地提高响应速度,减小转速超调,抑制转矩脉动。
参 考 文 献:
[1] 陈坤华,孙玉坤,李天博.开关磁阻电机无位置传感控制器研究[J]. 电机与控制学报,2016,20(03):86.
CHEN Kunhua, SUN Yukun, LI Tianbo. Sensorless control of switched reluctance motor [J].Electric Machines and Control, 2016, 20(03): 86.
[2] 王旭东,王喜莲,王炎,等.开关磁阻电动机电流双幅值斩波控制[J].中国电机工程学报,2000,20(4):84.
WANG Xudong, WANG Xilian, WANG Yan et al. Doubleamplitude chopping controlof switched reluctance motor[J]. Proceedings of the CSEE, 2000, 20(4): 84.
[3] 周永勤,王旭东,张玉光等.开关磁阻电机模糊滑模观测器间接位置检测[J].电机与控制学报,2013,17(06):58.
ZHOU Yongqin, WANG Xudong, ZHANG Yuguang et al. Sensorless detection technique on fuzzy sliding mode observer for SRM [J].Electric Machines and Control, 2013, 17(06): 58.
[4] Luís O A P Henriques, Luís G B Rolim, Walter I Suemit su, et al. Torque ripple minimization in a switched reluctance drive by neuro-fuzzy compensation [J].IEEE Transactions on magnetic, 2000, 36(5):3593.
[5] 周京星,曹鑫,鄧智泉,等.一种单绕组无轴承开关磁阻电机抑制转矩脉动和悬浮力波动的控制方法[J].电工技术学报,2018,33( 3):635.
ZHOU Jingxing, CAO Xin, DENG Zhiquan et al. A Novel Control Method for Single-Winding Bearingless SwitchedReluctance Motor to Reduce Torque Ripple andRadial Force Ripple[J]. Transactions of China Electrotechnical Society, 2018, 33(3): 635.
[6] 唐广雪,朱学忠,张磊.基于SMO 的开关磁阻电机无位置传感器控制仿真研究[J].机电工程,2016,33(03):304.
TANG Guangxue, ZHU Xuezhong, ZHANG Lei. Simulation research on sensorless control of switchedreluctance motor based on SMO [J].Journal of Mechanical and Electrical Engineering, 2016, 33(03): 304.
[7] 蒯松岩,张旭隆,王其虎,等.开关磁阻电机神经网络无位置传感器控制[J].电机与控制学报,2011,15(08):19.
KUAI Songyan, ZHANG Xulong, WANG Qihu et al. Position sensorless control of SRM using neural network [J]. Electric Machines and Control, 2011,15(08): 19.
[8] 汤小君,易灵芝,朱建林,等.非线性模型的开关磁阻电动机转矩脉动抑制[J].电机与控制学报,2007,11(2):121.
TANG Xiaojun,YI Lingzhi,ZHU Jianlin,et al.Torque ripple reduction in switched reluctance motor based on the nonlinear model[J]. Electric Machines and Control, 2007, 11(2): 121.
[9] 杨先有,易灵芝,段斌,等.开关磁阻电机调速系统BP 神经网络建模[J].电机与控制学报,2008,12( 4) : 448.
YANG Xianyou, YI Lingzhi, Duan Bin et al. Modeling switched reluctance driving with the BP neural network[J]. Electric Machines and Control, 2008, 12( 4): 448.
[10] 薛梅,夏长亮,王慧敏,等.基于DSP的开关磁阻电机磁链特性检测与神经网络建模[J].电工技术学报,2011,26( 2):69.
XUE Mei,XIA Changliang,WANG Huimin et al.Flux Linkage Characteristic Measurement Based on DSP and Artificial NeuralNetwork Modeling for Switched Reluctance Motor[J]. Transactions of China Electrotechnical Society, 2011, 26(2): 69.
[11] 孙庆国,吴建华.基于转矩分配函数在线修正的开关磁阻电机转矩脉动抑制策略[J].电机与控制学报,2017,21(12) : 3.
SUN Qingguo, WU Jianhua. Torque ripple minimization for switched reluctance motorsby online modification of torque sharing function[J]. Electric Machines and Control, 2017, 21(12): 3.