基于BP神经网络的通风机自动监测控制系统研究
2019-01-17 02:08田贵斌
机械管理开发 2018年12期
田贵斌
(同煤集团四台矿通风区, 山西 大同 037007)
引言
由于矿井通风机在工作中长期处于全功率运转状态,造成了电能的极大浪费,据统计,矿用通风机系统的工作耗电量可达煤矿工作耗电的30%以上。另外,多数风机系统采用人工控制的方式,快速反应能力差,控制效率低下。因此,为了有效克服现有煤矿通风机控制系统的缺陷,就需要针对性的开发一款新的矿用通风机自动监测控制系统,实现对通风机运行的全程监控,并具备自动化控制功能,切实的提高煤矿通风机系统的自动化管理水平。
1 矿井通风机自动监控系统总体结构
新型的矿井通风机自动监控系统主要包括PLC监测控制系统、供电系统、数据传输系统及监控计算机系统组成。该系统主要以PLC监测控制系统为核心,同时还包括各种类型的传感器设备,如温度传感器、风压传感器、瓦斯浓度传感器、电流传感器等,其总体结构如图1所示。

图1 通风机自动监控系统总体结构示意图
为了确保通风机系统在运行时的高效性,该自动化监测控制系统,采用了大量的传感器设备对风机运行时的转速、风量、风压,煤矿井下巷道内的瓦斯浓度、粉尘浓度等关键参数进行实时监测和处理,经过PLC控制系统处理后,将处理结果反馈到风机控制系统中,对风机运行的情况进行调节,确保风机安全高效的运行。
该通风机自动监测控制系统正常工作的基础是各传感器设备采集到的信息准确可靠,一方面由于各类传感器设备作为该自动监测控制系统最前端的“耳目”,在应用过程中其测量误差一般是很难避免的,而这些测量误差又将影响到对各类关键监控参数的采集,进而导致自动监测控制系统控制的高效性和稳定性,所以为了在选用传感器设备时,需要选用精密性高、可靠性好的传感器。另一方面,传感器在设备及巷道内的布置位置将直接影响到数据采集的准确性,根据大量的实际测量数据对比分析,该通风机自动监测控制系统中各类传感器设备的布置如图2所示。
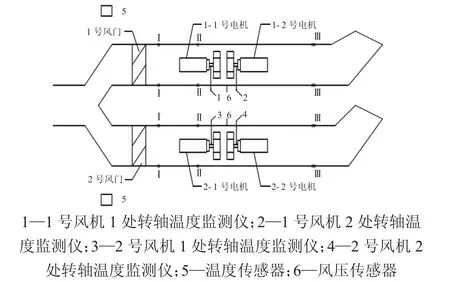
图2 自动监控系统传感器布置示意图
2 通风机自动监控系统的BP神经网络控制
因煤矿井下环境复杂,井下气流、风压等受各种因素影响极大,较为精确的数据参数无法完全掌握,无法建立精确的控制模型,因此传统的控制理论难以满足对通风机监测控制系统的自动控制。在其控制结构中必须依赖于对现场试验及调试所获取的实际参数。因此我们引入了PID控制技术,该技术具有算法简单、适用性强的特点,其采用了负反馈的逻辑控制技术,由PID控制器及各个被控对象共同构成了闭环反馈控制系统,最终利用负反馈作用原理来实现对系统的控制,其控制原理如图3所示。

图3 常规PID控制逻辑
常规PID控制中因无精确的逻辑参数,因此在实际应用中受到较大限制,为了达到实用性控制效果,必须对其进行基于实际检测参数反馈控制调节,神经网络PID控制是对常规PID控制优化,通过神经网络学习可以实现最优控制逻辑PID反馈控制,基于BP神经网络PID控制系统的控制逻辑如图4所示。

图4 基于BP神经网络的PID控制控制逻辑
该控制器是由常规PID控制器与BP神经网络控制器构成,在该控制系统中由常规PID控制器实现对ki、kj、kk等数据参数的在线整定,然后利用BP神经网络学习算法使其达到最优控制模式。BP神经网络控制器控制目标时给定输入和系统输出参数误差最小,并以此为基础来对神经网络连接权值进行调节,利用整定参数自动调节各监测信息数据。在该通风机自动监测控制系统中,其基于BP神经网络的PID控制主要包括两部分组成,其控制逻辑如图5所示。

图5 通风机监测系统BP神经网络控制结构
该控制系统在工作中根据通风控制系统的运行情况,把零误差输出作为控制目标,把系统设定值e(k)传感器的采样输出值y(k)系统运行神经网络算法逻辑优化后误差r(k),作为系统输入值,将ki、kj、kk作为系统的输出参数,利用网络控制算法对控制程序进行调整,最终将其转化为对通风机运行的控制信号,实现对通风机运行的精确控制。
3 结语
通过对现有通风机控制系统缺点的研究,根据实际工作经验和矿山机械设备自动化及节能的发展要求,提出了基于BP神经网络的通风机自动监测控制系统,对该控制系统的总体结构布局及传感器设备的布置形式进行了接收,同时对通风机自动监控系统的BP神经网络控制原理进行了详细的介绍,该自动监控系统实现了对通风机的自动控制,能够对各传感器监测的数据进行优化分析修正,减少传感器监测数值的误差,提高控制系统控制的精确性,具有十分显著的经济效益。
猜你喜欢
法律方法(2022年2期)2022-10-20
煤气与热力(2021年12期)2022-01-19
中学生百科·大语文(2021年11期)2021-12-05
纺织科学研究(2021年7期)2021-08-14
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
37°女人(2017年11期)2017-11-14
重型机械(2016年1期)2016-03-01
海军航空大学学报(2015年4期)2015-02-27
筑路机械与施工机械化(2014年4期)2014-03-01