
基于myRIO的移动机器人测距系统设计
2019-01-13 01:25李士琳
科技风 2019年36期
关键词:移动机器人
摘 要:移动机器人在行驶过程中需要感知周围环境状态,设计一种基于myRIO的移动机器人测距系统。介绍系统硬件结构,并陈述了测距系统软件设计。结果表明,该测距系统工作可靠、精度高,可以实现机器人避障以及高级的路径规划。
关键词:移动机器人;myRIO;测距系统
中图分类号:TP242文献标识码:A
1 绪论
近年来,移动机器人广泛应用在智能化物流车间、电力隧道巡检等领域[1]。移动机器人通过多传感信息融合感知周围环境状态,测距系统是移动机器人感知外界环境的关键技术[2]。传统的移动机器人控制系统往往采用单片机作为主控制器,由于考虑到控制系统的稳定性,本文设计一种基于myRIO的移动机器人测距系统。常用的机器人测距传感器有超声波测距传感器和红外测距传感器,本文围绕这两种传感器组成的测距系统展开介绍。
2 系统硬件介绍
2.1 超声波测距传感器
超声波测距传感器的主要工作过程是主控制器通过给超声波测距传感器发出触发脉冲信号,传感器发出超声波脉冲,当遇到障碍物再返回给传感器[3]。由此计算前方障碍物的距离,式(1)为距离计算公式。
S=v*t2(1)
超声波测距传感器实物如图1所示。
2.2 红外测距传感器
本系统选用的红外测距传感器可以提供10-80cm的有效探测距离。实验表面,在此距离范围内,电压与距离成近似反比的关系。式(2)中,即为所求前方障碍物的距离,为检测到的电压值,为测量系数,查手册可知,取27.5。
y=kx(2)
红外测距传感器如图2所示。
3 软件设计
3.1 编译环境介绍
myRIO作为主控制器编程开发简单,支持LabVIEW编程。LabVIEW是一种编程语言,由美国国家仪器(NI)研发,类似于C语言编程,但又与C语言编程有很大区别[4]。如图3所示,LabVIEW使用的是图形化编辑语言G编写程序,编译环境包括前面板和程序框图,前面板可以创建很多控件,程序框图主要用来编写常见的逻辑结构[5]。这种编程方式容易理解,方便初学者学习和使用。
3.2 程序设计
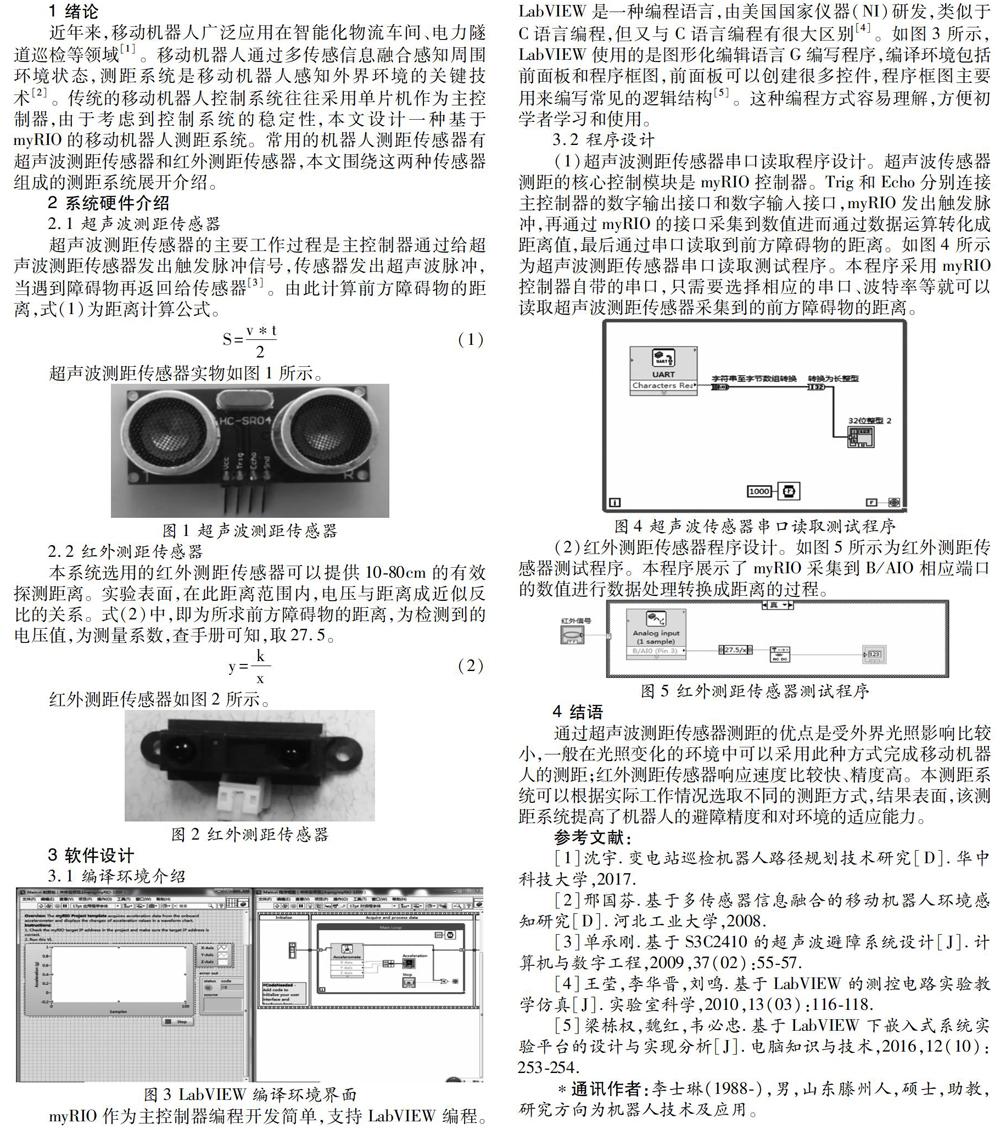
(1)超声波测距传感器串口读取程序设计。超声波传感器测距的核心控制模块是myRIO控制器。Trig和Echo分别连接主控制器的数字输出接口和数字输入接口,myRIO发出触发脉冲,再通过myRIO的接口采集到数值进而通过数据运算转化成距离值,最后通过串口读取到前方障碍物的距离。如图4所示为超声波测距传感器串口读取测试程序。本程序采用myRIO控制器自带的串口,只需要选择相应的串口、波特率等就可以读取超声波测距传感器采集到的前方障碍物的距离。
(2)红外測距传感器程序设计。如图5所示为红外测距传感器测试程序。本程序展示了myRIO采集到B/AIO相应端口的数值进行数据处理转换成距离的过程。
4 结语
通过超声波测距传感器测距的优点是受外界光照影响比较小,一般在光照变化的环境中可以采用此种方式完成移动机器人的测距;红外测距传感器响应速度比较快、精度高。本测距系统可以根据实际工作情况选取不同的测距方式,结果表面,该测距系统提高了机器人的避障精度和对环境的适应能力。
参考文献:
[1]沈宇.变电站巡检机器人路径规划技术研究[D].华中科技大学,2017.
[2]邢国芬.基于多传感器信息融合的移动机器人环境感知研究[D].河北工业大学,2008.
[3]单承刚.基于S3C2410的超声波避障系统设计[J].计算机与数字工程,2009,37(02):55-57.
[4]王莹,李华晋,刘鸣.基于LabVIEW的测控电路实验教学仿真[J].实验室科学,2010,13(03):116-118.
[5]梁栋权,魏红,韦必忠.基于LabVIEW下嵌入式系统实验平台的设计与实现分析[J].电脑知识与技术,2016,12(10):253-254.
通讯作者:李士琳(1988-),男,山东滕州人,硕士,助教,研究方向为机器人技术及应用。
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
物联网技术(2017年3期)2017-03-30
物流科技(2017年3期)2017-03-29
现代电子技术(2017年4期)2017-03-23
现代电子技术(2016年23期)2017-01-12
电子技术与软件工程(2016年20期)2016-12-21
科学与财富(2016年28期)2016-10-14
企业文化·中旬刊(2015年12期)2016-03-09
软件导刊(2015年8期)2015-09-18
