机载激光探测水中目标湖上试验方法探讨
2019-01-12 02:43:38杨镇源马徐琨李正刚
声学与电子工程 2018年4期
杨镇源 马徐琨 李正刚
(中国船舶重工集团公司七五〇试验场,昆明,650051)
1 机载激光水下探测器技术特性
由于海水存在类似于大气红外窗口的“蓝绿窗口”(其波长450~550 nm),因此蓝绿激光具有较高的海水透过率[1]。机载激光水下探测就是从巡航(或悬停)飞机上向水面发射蓝绿激光脉冲,穿透一定深度的水体后被水下目标反射,然后接收其回波信号,根据激光脉冲往返传播的时间确定水下目标的深度位置,并根据特定目标表面对激光能量的吸收强于它周围的海水所产生的“黑洞”现象,对目标进行识别、跟踪。影响机载激光水下探测的主要因素是水面的平整度、水的混浊度、目标的反射率、探测器的灵敏度,以及对信号的识别与处理技术水平等。目前,机载蓝绿激光探测的水下深度一般为50~100 m(有报道称美国NASA探测设备可达到1.5 km,俄罗斯激光探测穿过130 m深的海水和淤泥[2]),比较适合于近浅海或浅水目标探测使用,加之其水下探测抗干扰性强的优势,已成为水下声/光探测互为补充的重要手段。
由于飞行平台的机动特性,机载激光水下探测器具有机动性强、作业范围广、探测速度快(每小时能探测几百平方千米)、小角度高密度扫描与反复搜索(对可疑目标的高分辨率可达到厘米级)、抗干扰性强(水声干扰不受影响)等特点,特别适用于近浅海水域测深、水文探测、测绘水底地貌、近浅海水下静/动目标探测等。
上世纪六十年代中后期,美国、澳大利亚、加拿大、瑞典、前苏联等国率先研究机载激光水下探测技术,几十年来得到了比较迅速的发展。如美国的RAMICS快速飞机排雷系统、美国的TAD-111机载多重任务激光器系统、澳大利亚的 LADS机载激光深度探测器、加拿大与瑞典共同研制的“鹰眼”机载海光测海系统。近几年,这方面的技术发展迅速,应用广泛。
我国在上世纪八十年代末九十年代初开始跟踪研究机载激光水下探测技术,多个大专院校和研究所在蓝绿激光探测方面已突破一些关键技术通过实验室机理性研究验证。近几年已有试验演示样机在进行外场验证试验,这其中,在环境条件良好的湖上进行空中激光探测水下试验尤其必要,它是机载激光最终在海上探测水下目标试验的过渡环节,可预先解决一些关键技术问题或验证改进样机性能,减小海上试验验证的风险并提高试验成功率。
2 湖上试验技术方法探讨
2.1 试验环境与条件
我国一些深水内陆湖泊水库,如抚仙湖、千岛湖、丹江口水库等,由于湖水清澈、通透率高、水文条件良好,很适合机载激光器试验。
以大深度的抚仙湖为例,其为高山断陷湖,面积约212 km2,四面环山,呈南北狭长葫芦形,长约31.5 km。北半部较宽阔,最宽处约11.5 km;平均深度104 m(占全湖面积的45.5%),最深处达155 m,南半部较窄较浅,平均宽约5 km,平均深度达64 m,湖中部最窄处约4 km,形成北深南浅的湖底缓变地形,具有典型的盆形湖底结构特征及深水湖特征。湖水透明度高(在4.9~12.5 m之间、水色 5~8号),半年时间为低湖况/低风况,湖面几乎水平如镜、平整度高(粗糙度仅 0.02~0.32 cm),湖区晴日多(年均达104天)、雾日罕见(全年均0.4天),有相当强的光照条件[3]。以上环境特点满足各种不同水深试验的水域要求,特别适应机载激光器大范围水下目标探测、浅水环境测量等试验需要。
湖上试验场的高架船及装置(高>30 m,可升降调节)、岸基沉箱平台(平台顶高>10 m)、以及浮吊船等升高机构,均可模拟飞机平台不同作业高度装载激光器进行探测试验。
2.2 机载激光器湖上试验方法研究
2.2.1 机载激光器水下环境探测试验方法
机载激光器探测水下环境(测深、测绘水底地形地貌等)主要在70 m以内水深范围,抚仙湖南半部区域特别适合(均深64 m),可进行较大面积(5 km×15 km)的激光武器环境探测试验。举例设计的试验方法如图1所示,在高架船正对船尾天井段装载激光探测器(船只航行时,此天井区域水面由于不受推进器或尾流影响,不会形成水面波浪,能保证激光探测所需的水面平整度)。高架船由南向北纵向航行(航速<7 kn,航程<15 km),再结合横向机动(走矩形航路或走锯齿形航路),大面积扫描探测湖底。与此同时,通过卫星获得定位数据,利于试后将激光器探测的数据与已有的抚仙湖深度地形电子数据进行对位比较,方便给出激光探测的测量精度。
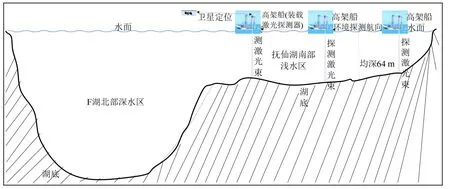
图1 激光器环境探测试验方法剖面示意图
此外,在南部浅水区还可进行湖底目标探测试验,即将坐底目标作为湖底环境的一部分(或称目标环境融合)进行激光探测试验。如将静态目标布于相应湖底位置,采用与上述相似的方法,高架船装载激光探测器按一定的航路寻探,获得探测激光图像和位置数据,试后比对并评估激光探测准确性或精度。
2.2.2 机载激光器水下静态目标探测试验方法
水下静态目标是指深潜器悬浮状态、悬停目标、锚目标等在水中处于静止的目标,其机载激光探测试验,可采用单船方法在任意水域进行。举例设计的试验方法如图2所示。
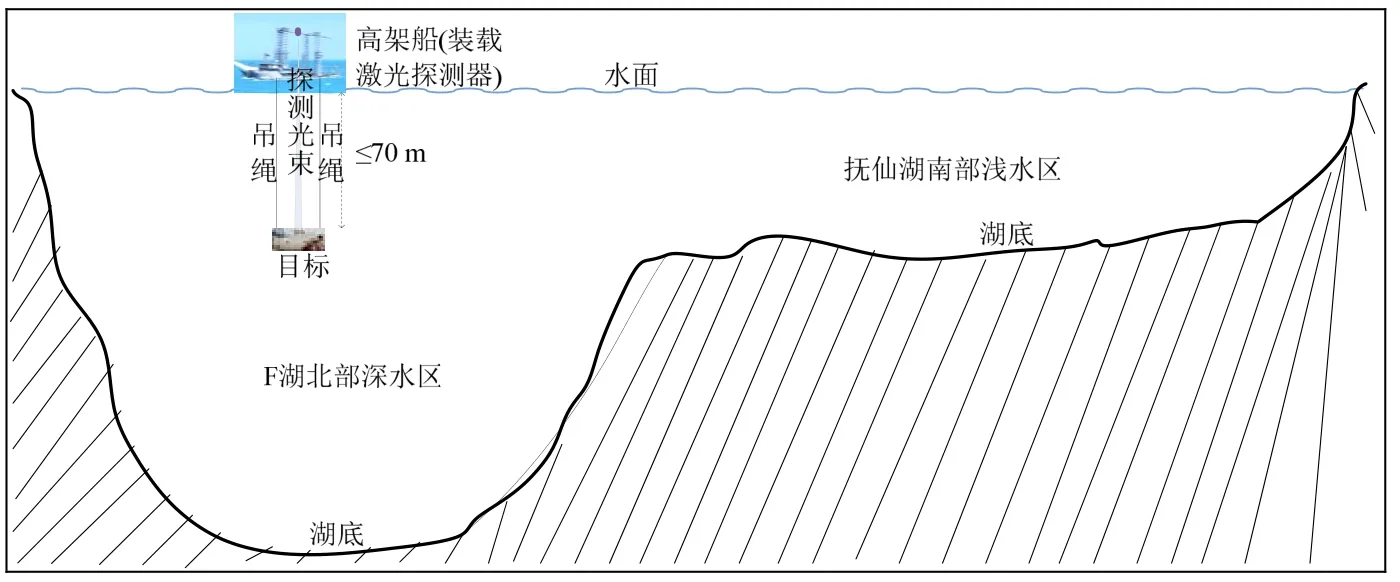
图2 激光武器水下静态目标探测试验方法示意图
在高架船后部天井段高台架上安装激光探测器,被测目标用缆绳吊放至下方一定水深位置,定点探测或扫描探测目标,获得探测目标激光图像数据,试后比对。具体探测一般采取以下方法:①激光探测器与目标间以尽可能小的入射角探测,目标深度逐步增加直到探测到最大深度;②在背景光、水质、目标不变的情况下,逐步增大激光入射角,得到每个入射角的最大探测深度;③在最深可探测位置,分别对不同的扫描速度、目标材质、水面波动、背景光、水质等条件下进行探测。
2.2.3 机载激光器水下动态目标探测试验方法
水下动态目标是指深潜器、自航平台、UUV、拖曳体等在水中运动的目标,其机载激光探测试验可在抚仙湖全湖区进行,但考虑到对目标本身要进行动态跟踪定位,因此,应选择在抚仙湖北部具有湖底跟踪系统的区域进行试验更为合适。举例设计试验方法如图3所示。
在高架船后部天井段装载激光探测器。高架船在指定范围内(约100 km2)走矩形航路或走锯齿形航路(大方向与水下目标航路一致并同步,航速<7 kn),大面积扫描探测水下目标。水下运动目标可按外形分为潜水器类、外形接近圆柱体类、扁平式UUV等异形类。目标航深可在70 m内变化,水平面可走直航、机动或各种形式轨迹,常规航速或低速航行(便于激光探测器扫描探测),航程在几千米到一二十千米范围。试验时,利用船载GPS定位系统和水下目标跟踪系统对两个目标进行跟踪定位,以指引完成激光探测试验,并对激光器探测的数据与目标航行位置数据进行对比分析,评估激光器动态探测水下运动目标的测量精度。

图3 激光器水下动态目标探测试验方法示意图
3 结束语
本文在分析机载激光探测器技术特性基础上,探讨了在湖上进行试验的技术方法,以抚仙湖为例,提出了湖上探测水下目标与环境(平台、UUV等实体目标及地形地貌环境目标)的动、静态实航试验技术方法。
2012年某研究所水下激光探测器在抚仙湖上利用高架船进行水下探测科研试验获得成功,说明了在湖上试验的可行性与有效性。本文所提方法是在此基础上的研究与扩展,旨在为机载激光器更深层的试验策划与试验方法设计提供参考。本文对方法的研究探讨只是初步的,一些方法设计细节,如机载激光器探测水下动态目标的轨迹设计特别是垂直方向轨迹如何与探测器配合还不够具体,这有待于今后的进一步研究。
猜你喜欢
东坡赤壁诗词(2023年1期)2023-05-30 10:48:04
领导文萃(2021年19期)2021-11-05 16:39:10
金秋(2021年12期)2021-10-06 04:07:28
铁道建筑技术(2020年11期)2020-05-22 06:26:38
青年歌声(2019年12期)2019-12-17 06:32:34
工程与建设(2019年1期)2019-09-03 01:12:32
经济技术协作信息(2018年20期)2019-01-19 02:56:44
民族音乐(2018年1期)2018-04-18 03:24:28
水利规划与设计(2016年9期)2017-01-15 14:00:46
诗潮(2016年1期)2016-12-08 11:06:36