有大气行星悬飞探测初步设想与可行性探讨
2019-01-10 09:04:22邢卓异马玉伟朱舜杰白崇延
深空探测学报 2018年4期
邢卓异,马玉伟,朱舜杰,白崇延
(北京空间飞行器总体设计部,北京 100094)
0 引 言
深空探测技术水平是一个国家综合实力的重要体现,在推动国家政治、经济和科技发展方面具有十分重要的战略意义。随着我国月球探测和火星探测的深入开展,我国已基本掌握了全部无人深空探测所采用的环绕探测、飞越探测、着陆探测、巡视探测和采样返回探测五类探测方式。这五类探测方式各自均具有一定的探测优势,同时也存在着一定的约束和限制。如环绕探测和飞越探测虽能实现大范围探测,但探测分辨率较低且无法实现就位探测;着陆探测虽能实现就位探测,但无法实现机动探测;巡视探测虽能够实现一定范围内的机动探测,但受地形约束强,如果想要探测被探测天体的深坑、峡谷、高山等位置,受地形、地貌的约束暂时无法实现探测。
针对上述需求提出了一种全新的“悬飞探测”的探测方式。该探测方式是针对被探测天体存在大气的环境特点,利用大气环境实现探测器在被测天体的“飞行”机动,从而摆脱地形、地貌对探测器的强约束,理论上可实现对被探测星球任意感兴趣位置的探测。悬飞探测器是一种全新的深空探测航天器,具有探测方式新、任务方式灵活、受地形地貌约束条件弱等特点,是对我国已掌握的深空探测中环绕探测、飞越探测、着陆探测、巡视探测和采样返回探测五类探测方式的有益补充。
悬飞探测器选取目前航空领域技术相对成熟的四旋翼为基线,针对悬飞探测器所面临的航天环境,进行环境适应性改造,如增加器地器间通信、增加被动热控措施、表贴太阳电池阵提供能源等,具体内容不是本论文论述重点,另文给出。但由于航空的四旋翼飞行器是以地球大气为飞行环境条件的,而悬飞探测器是在被探测的有大气行星为飞行环境条件的,二者的差别较大。目前国内外均暂无相关的研究成果可以证明悬飞探测器的任务可行性。
本文简要给出悬飞探测器典型任务工作设想,重点完成悬飞探测器的可行性约束条件分析,为悬飞探测器在深空探测的可行性研究提供理论依据。
1 悬飞探测器典型任务工作设想
本文针对悬飞探测器的轻巧、灵活、高机动特性等任务特点,给出悬飞探测器的典型任务工作设想。
1)“空中投送”探测飞行方案
悬飞探测器安装在进入舱内部,在进入舱进入到预定高度后打开进入舱的降落伞,当进入舱的速度降低到一定速度时,进入舱从头部展开释放悬飞探测器,如下图所示。释放后,悬飞探测器与环绕器通信,实现器地的通信。该方案由于无需软着陆相关装置,可为探测器系统节约较多重量。
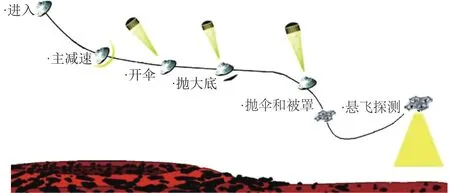
图1 “空中投送”探测飞行方案任务设想Fig.1 “Delivery” flight mission assumption
2)“哨兵”探测飞行方案
悬飞探测器与着陆器形成“悬飞探测器-着陆器”组合体,组合体按已掌握的着陆探测实现组合体着陆后,悬飞探测器与着陆器机械分离,悬飞探测器以着陆器为起飞平台实现起飞,起飞后利用所携带的光学载荷或其他探测载荷进行探测,如下图所示。为着陆器或巡视器充当“哨兵”,提供地形、地貌等环境条件。悬飞探测器与着陆器或巡视器通信,实现器地的通信。该方案与现有探测方式结合,工程可实现性最好。
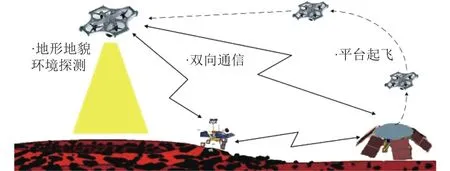
图2 “哨兵”探测飞行方案任务设想Fig.2 “Sentry” flight mission assumption
3)“编队”探测飞行方案
采用前述“空中投送”方案或“哨兵探测方案”完成悬飞探测器在有大气行星的释放多个悬飞探测器进行编队飞行探测,如下图所示。悬飞探测器间进行信息共享和相互协同,从而可以完成单一探测器所不能完成的一项或多项复杂的空间任务。
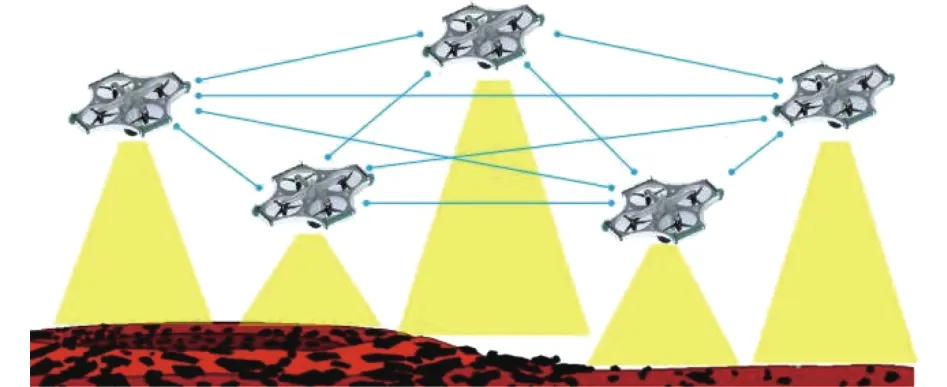
图3 “编队”探测飞行方案任务设Fig.3 “Formation flight”flight mission assumption
2 可行性约束条件
2.1 动力学建模
根据悬飞探测器的飞行原理定义悬飞探测器控制输入如式(1)所示:

式中:ρ为被探测器天体的大气密度;Ct为旋翼升力系数;Cd为旋翼阻力系数;ωi(i=1,2,3,4)为第i个旋翼的角速度。
悬飞探测器六自由度动力学模型[7-8]基于以下假设:
1)地面坐标系设定为惯性系;
2)假设悬飞探测器是刚体,悬飞探测器运动视为六自由度刚体运动;
3)由于悬飞探测器飞行高度较低,飞行距离不是特别远,因此视被探测天体表面为平面,并不考虑重力加速度随飞行高度变化而变化;
4)不考虑被探测天体的公转和自转影响;
化简后的悬飞探测器六自由度动力学方程如式(2)所示
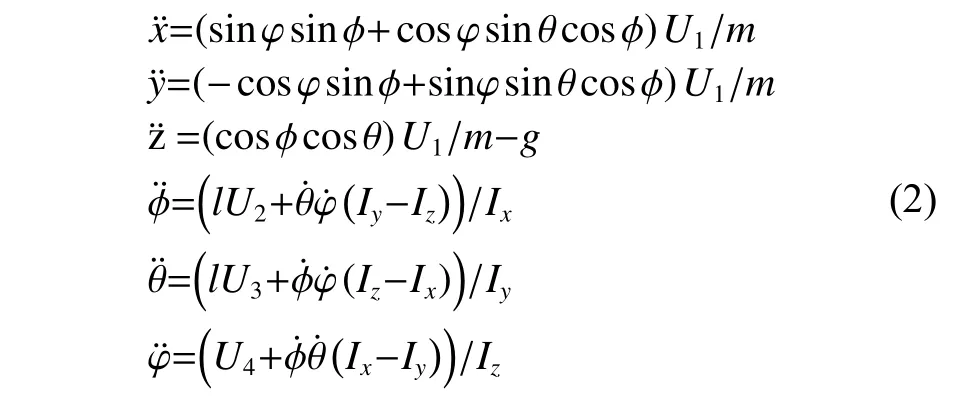
其中:ϕ,θ,φ分别是悬飞探测器的滚转角、俯仰角和偏航角;x,y,z分别是惯性坐标系下的位置。
2.2 可行性约束条件
根据前节所建立动力学模型,建立针对不同大气环境、重力条件进行数学建模,确认悬飞探测器与大气等环境之间可行性的约束关系。
假设不考虑被探测天体出现大风等极限天气条件,悬飞探测器能够实现悬飞探测的基本条件为悬飞探测器能够在被探测天气悬停。即悬飞探测器4个旋翼产生的升力合大于等于重力,如式(3)所示

由式(1)可知

即被探测器天体环境对悬飞探测器可行性的约束关系如式(5)所示

式中:m为悬飞探测器质量;g为被探测器天体的重力加速度;ρ为被探测器天体的大气密度;为旋翼升力系数;ωi(i=1,2,3,4)为第i个旋翼的角速度。
为了更加直观的体现可行性约束条件,定义可行性系数R,定义为探测天体的重力系数/大气密度与地球环境的重力系数/大气密度比,如式(6)所示

式中:g为被探测器天体的重力加速度;g0为地球的重力加速度;ρ为被探测器天体的大气密度;ρ0为地球的大气密度。
相对而言,陆军的BIM发展政策最为完善和系统化。 而其中起决定性作用的是美国陆军工程兵部队 (US Army Corps of Engineers,USACE)。 陆军工程兵部队为美国国防部下属所有国内和海外军事设施提供工程设计、项目管理、施工管理以及运行维护服务。早在2006年10月,陆军工程兵部队下属工程研究与发展中心 (Engineer Research and Development Center,ERDC) 制定并发布了未来15年的BIM发展路线规划,承诺未来所有军事建筑项目都使用BIM技术,其阶段性的目标和长期战略目标见图2。 这意味着BIM在军事建筑领域将全面普及。
由式(5)可知:
1)可行性系数R≤1,现在已有可在地球使用的四旋翼可用于悬飞探测器进行探测;
2)可行性系数R>1,
①现在已有可在地球使用的四旋翼无法直接用于被探测天体的探测;②可通过提高悬飞探测器的升力系数(正比关系)、减小悬飞探测器质量(反比关系)和提高旋翼转速(平方正比关系)等方式,解决悬飞探测器可行性的问题;③提高旋翼转速虽然是最有效(平方正比关系)的解决悬飞探测器可行性的技术途径,但旋翼转速增大会带来悬飞探测器所受阻力增大,通常浆尖马赫数通常不大于0.8 Ma,在一定程度限制了悬飞探测器的可行性。
根据上述分析可知,太阳系内土卫六、金星的可行性系数R≤1,应具有较好的探测条件;火星的可行性系数R>1,现有地球使用的四旋翼飞行器应无法直接应用于火星探测。
3 仿真分析
根据调研结果,太阳系内有大气行星主要包括金星、火星和土卫六等,本文以土卫6为被探测天体,开展仿真分析工作。
3.1 仿真分析初始条件
仿真分析初始条件如下表所示:
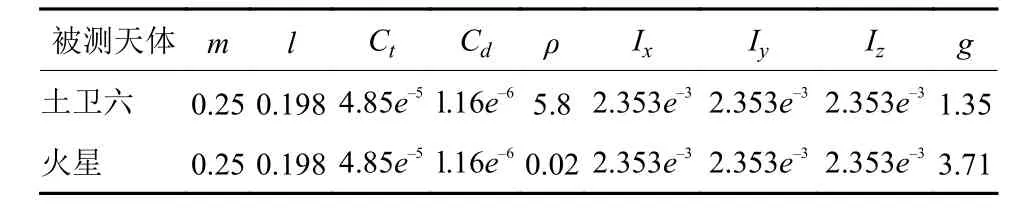
表1 动力学仿真分析初始条件Table 1 Dynamic simulation analysis initial conditions
悬飞探测器初始状态为原点位置悬停状态,给定的飞行轨迹为螺旋上升曲线,如式(7)所示

3.2 控制算法说明
控制算法采用非线性动态逆控制算法[1-2],划分成角速度回路、姿态角回路和位置回路。整个动态逆控制系统的结构如图4所示。
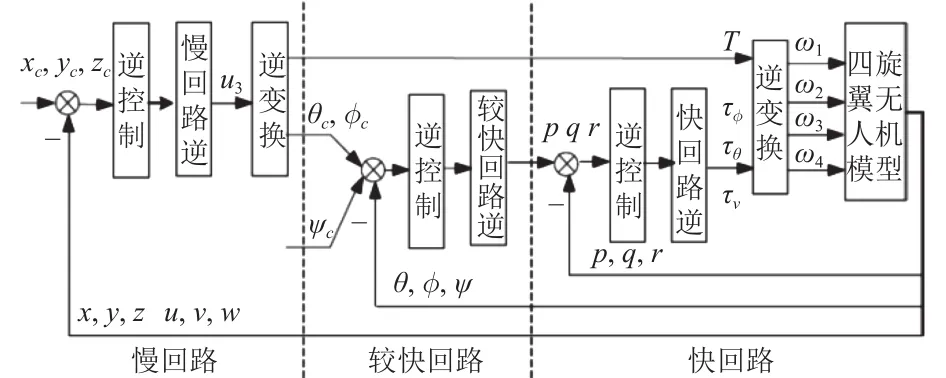
图4 动态逆控制系统结构图Fig.4 Structure diagram of dynamic inverse control system
3.3 仿真结果
悬飞探测器火星和土卫6的环境条件下的运动路径仿真结果如图1所示。悬飞探测器在金星、土卫6和地球环境条件下的旋翼动态响应如图2所示。
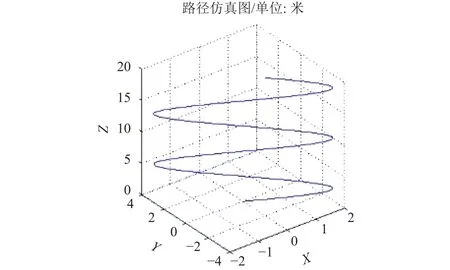
图5 悬飞探测器在土卫6环境下的运动路径仿真分析结果Fig.5 Simulation results of motion path simulation on Saturn6
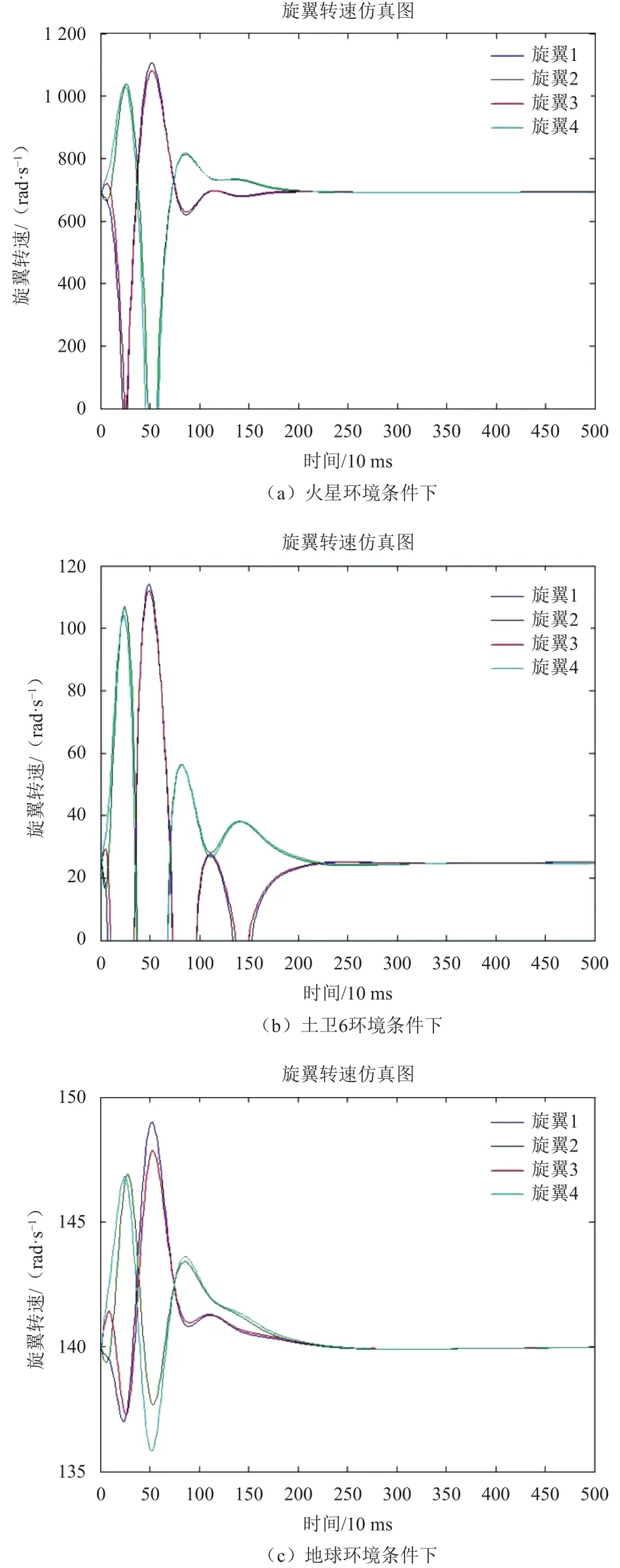
图6 不同环境下悬飞探测器旋翼转速动态响应Fig.6 Dynamic response of rotational speed in different environment
从仿真结果可知:土卫6具有良好的悬飞探测条件,现有地球环境四旋翼的机体结构强度、电机转速响应以及飞行控制率均能够直接应用到土卫6的深空探测任务;
火星的大气密度较为稀薄,通过目前的仿真结果看,旋翼转速比地球环境旋翼转速快5倍左右,且动态响应约是地球的10倍左右,现有地球环境四旋翼的机体结构强度、电机转速响应以及飞行控制率无法直接应用到火星的深空探测。
仿真结果与本论文3.2节所述的可行性约束条件分析的结果完全一致,证明了本文所给出的可行性约束条件理论正确性。
4 结 论
本文针对深空探测任务中的被探测天体存在大气的特点,提出了利用被探测天体大气开展悬飞探测的全新探测形式。创新的提出了悬飞探测器开展悬飞探测的可行性系数,为悬飞探测器可行性研究提供理论依据,可作为后续悬飞探测器相关研究工作的参考。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27 06:29:28
太空探索(2020年10期)2020-10-22 03:59:40
航天器工程(2019年4期)2019-11-11 03:41:00
百科探秘·航空航天(2019年4期)2019-06-11 05:43:07
百科探秘·航空航天(2019年5期)2019-06-06 01:38:54
伙伴(2019年12期)2019-01-17 04:38:56
Frontiers of Nursing(2018年1期)2018-05-21 02:34:14
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
高中生·天天向上(2016年6期)2016-11-22 09:39:34
中学科技(2015年7期)2015-07-03 05:44:32