
减速状态下多分枝拖曳线列阵声纳系统的功能有效性
2019-01-07 03:34朱克强史英沙毛垚飞赵望奇
中国航海 2018年4期
周 晨, 朱克强, 史英沙, 毛垚飞, 赵望奇
(宁波大学 海运学院, 浙江 宁波 315211)
近年来拖曳线列阵声纳系统在潜艇战和反潜战中有较广泛的应用,其优势在于将声纳接收器安装在浮力拖缆上,使之远离母舰的自噪声,从而实现母舰的远距离警戒。[1-2]水下多分枝拖曳线列阵动力学属于非光滑、非线性参数激励多体系统,它本身是非自治系统,但在某些特殊情况下它可以退化为自治系统,如Duffing系统、Mathieu系统和Van der pol系统等,随着参数的变化,系统的周期解可能失稳而发生如信周期分岔、鞍-结分岔、Hopf(霍夫) 分岔、树枝分岔和对称破缺等局部分岔,也可能发生全局分岔、混沌;高阶退化还可能产生激变等,研究这些复杂的动力学机理的理论及其控制方法,对克服单线阵所存在的目标左右舷模糊问题和目标定深问题、实现潜艇目标的三维定位等具有重要意义,也有着十分重要的应用价值。
多分支拖曳线列阵声纳系统在正常工作时,一般处于运动稳定状态或是准稳定状态,这是由于当系统运动状态变化过于剧烈时,会严重影响声纳系统工作的有效性和准确性。判断多分枝线拖曳列阵系统是否处于稳态运动的指标一般有以下两个:
1) 线阵声学段内张力关系到系固在段内的水听器的安全性能及其工作稳定性。因此,准确对线阵声学段内张力进行估计和预报是非常有必要的。
2) 拖曳舰艇机动或变速航行时为了准确探测潜艇声源位置,这就必须先精确预报拖曳线列阵声纳的位置和构型姿态,在水下拖曳时,易受舰艇机动与洋流的影响,出现阵型畸变后探测性能下降、甚至无法工作的状态。
RISPIN[3]在20世纪80年代进行过较精确的缆索水下试验。缆索水下拖曳试验的要求十分复杂且试验费用较高,现在大多数学者在研究缆索的水动力学问题过程中主要采用计算机仿真模拟计算的方法。[4-12]部分学者研究时默认拖曳母舰恒速来对系统水动力性能进行分析,然而在实际工作时拖曳母舰无法保持恒速,为分析拖带母舰旋回或变速机动时可能引起的线列阵失速下沉、构型畸变等问题,本文建立线阵工作过程的三维离散模型,分析母舰变速机动情况下所拖曳的多分枝线列阵的水动力性能变化情况,使得算例更加符合实际。
1 建立模型
1.1 具体海况
我国南海海域的波浪平均周期为4~6 s,选取3~4级海况作为实际工况,选取某海域,根据统计结果,当波浪周期与有效波高的联合分布概率达到极大值时,波浪平均周期约为4.5 s,有效波高约为1.2 m。[13]为在分析中尽可能还原实际工作海况,选取波浪周期T=4.5 s,有效波高H=1.2 m,流速为1.2 m/s的海况作为模拟工作海况。风对于拖曳线列阵的水动力学效应影响不大,故在选取环境因素时未予以考虑。
1.2 模型建立及其具体参数
多分枝拖曳线列阵的结构示意见图1,系统由2支细长单线阵分别为Array A与Array B与1个由气枪脐带缆牵连的气枪组成,各单线阵的组成部分包括拖曳导引缆Leader A与Leader B、气枪导引缆、尾绳部分Tail A与Tail B以及连接浮体Coupler A与Coupler B组成。图1中最上端的结构为拖缆控制器“水鸟”Diverter为稳定线阵,使用弹性结构Link弹性连接拖曳部分B导引缆和C导引缆。B阵列和气枪缆,A阵列和B阵列之间使用缆索Spreader连接,其目的是限制两个单线阵间距,在确保探测精确度的同时保护装置结构安全。多分枝拖曳线列阵在减速运动过程中阵型变化的历程图见图2。
线列阵各部分线性参数见表1。d为缆的横截面的直径;ρc为缆密度;EA为轴向拉伸刚度;EI为弯曲刚度;Cdτ、Cdn和Cdb分别为各缆索的切向阻力系数、法向阻力系数以及副法向阻力系数;Caτ、Can和Cab分别为切向附加质量系数、法向附加质量系数以及副法向附加质量系数。

表1 线列阵线型参数表
1.3 阵列分支拖曳分析
软件一般使用全局坐标系和局部坐标系两种坐标系来定义建模。两种坐标系均符合右手准则。[3-4]全局坐标系用于整体分析,如整个模型运行中船体的位置、缆体变形等;局部坐标系则主要用于确定相对模型运动变化,如船舶的纵摇、纵荡及横摇等一类摇荡角度均是参考设置在船体上的局部坐标系给出的。
Orcaflex在计算分析过程中主要分为静态分析和动态分析2个步骤。
1) 静态分析是进行下一步动态模拟的基础,即首先确定系统模型在重力、浮力及水动阻力等作用下是否能够达到静平衡,若可以则进行下一步动态模拟分析。
2) 动态分析以上一步静态分析结束位置为起点,模型在确定的时间段内进行模拟,计算相应的动态响应。
计算模型的时间和仿真阶段见图3。图3中:-10~0 s为静态平衡分析(Build-up)阶段;0~30 s为动态分析阶段,其中动态分析又分为仿真阶段1和仿真阶段2两个阶段。
系统等效运动方程为
M(R,a)+C(R,v)+K(R)=F(R,v,t)
(1)
式(1)中:R为位置;t为模拟时长;v和a分别指其速度与加速度的矢量;M(R,a)为惯性负载;C(R,v)为阻尼负载;K(R)为刚度负载;F(R,v,t)为外界负载。Orcaflex基于离散集中质量模型,利用显示积分方法或隐式积分方法进行求解。根据给出对象的初始状态,导出作用在节点或物体上的外力及外力矩,代入运动方程后得到下一时刻的物理量,反复迭代计算最终得到完整模拟阶段的模型运动特性。Orcaflex中的缆索采用的凝集参数模型见图4,详见Orcaflex说明书。
线列阵分布外力为
q=w+FS+Fd
(2)
式(2)中:w为线列阵自重;FS为静水力,其计算为
FS=B-(pr′)′
(3)
图3中:B为线列阵单位长度上的浮力,其中p为阶梯状作用在杆件上x点的静水压力以及杆件上的水动力Fd,采用Morison方程计算为
(4)

(5)
(6)
式(6)中:ρ为外部流体密度;u为x方向(波浪前进方向)上水质点运动速度之幅值,它是垂向坐标z的函数;θ为相位角;ωv为主导升力圆频率,它被假定为与主导涡泄频率2πfv相等。CL0为线列阵的升力系数;CL/CL0为在动力相似的流动状态中线列阵的实际升力系数与固定柱体升力系数之比,定义为升力放大系数,它是局部Keulegan-Carpenter数KC与特征Keulegan-Carpenter数KC*的函数。
单位长度线列阵上的顺流作用力则可用修正的Morison公式为
(7)
式(7)中:VC为定常流流速;x为顺流方向振荡位移;CM为惯性力系数;CD0为定常柱体的阻力系数;CD/CD0为阻力放大系数。CM和CD0为Re数和KC数之函数,取决于线列阵上的当地值。阻力放大系数则与横流振动幅值和频率有关,这一相关关系为
(8)
2 计算结果及分析
船舶在减速制动过程中达到速度V时所需时间为
(9)
式(9)中:W为船舶实际排水量,t;V0为定常速度,kn;R0为速度V0时船舶所受阻力,t。在模拟工况时,分别论述拖曳线列阵声纳系统所附母舰在30 s内降速1 kn、2 kn、3 kn、4 kn、5 kn。上述减速情况前3类在该型拖曳母舰机动中属于正常变速范畴,4 kn、5 kn则属于紧急制动状态。
2.1 拖曳母舰制动减速过程中阵列声学段内张力变化情况
线阵声学段内张力则关系到系固在段内的水听器的安全保障性能及其工作稳定性。因此,准确对线阵声学段内张力进行估计和预报是非常有必要的。
阵列A、阵列B的声学段内张力在时域上的变化情况见图5和图6,阵列A、阵列B的声学段内张力衰弱百分比与拖曳母舰减速的响应情况见表2。结合表2观察图5、图6可得:在拖曳母舰航速及方向不变时,阵列A、阵列B的声学段内张力呈现稳定的周期性振荡,并未出现激荡性的突变,也未产生鞭击效应,张力情况变化最大是在30 s内减速5 kn的情况,阵列A、阵列B内张力的最大值分别为82.928 kN、96.485 kN,最小值分别39.845 kN、33.201 9 kN,未出现超出许用张力范围或缆绳松弛状态的情况,工作安全性得到保障。阵列A声学段内张力衰减百分比幅度区间为(5.20%,22.22%),阵列B声学段内张力衰减百分比幅度区间为(5.46%,24.70%),两分支阵列声学段内张力随着母舰的减速均出现一定幅度的衰弱,这是由于母舰的拖曳速度减小后,阵列A、阵列B所受法向阻力和切向阻力都减小了,所以内张力也会响应地减小;随着拖曳母舰减速幅度增大,阵列A、阵列B的内张力衰弱幅度增大;母舰减速与否并不影响张力的变化周期,有利于系固在段内的水听器工作稳定性。
在生态保护和社会经济发展双重压力下,乌江风情廊道产业转型升级需以旅游产业为主导,以旅游主导资源配置方式,实现区域产业的生态化升级和集群式发展,实现在全国生态功能区优质生态产品与文化旅游产品的并行发展。

表2 阵列最大张力衰弱百分比 %
综上所述:母舰的拖曳速度减小后,阵列A、阵列B声学段内张力会响应地减小;拖曳母舰减速幅度越大,阵列A、阵列B的内张力衰弱幅度越大;声学段内张力呈现稳定的周期性振荡,并未出现较大幅度的突变,也未产生鞭击效应,母舰减速与否并不影响张力的变化周期,可认为母舰减速过程对于其所拖曳的多分枝线列阵的线阵声学段的安全保障性能及工作稳定性不存在影响。
2.2 拖曳母舰制动减速过程中阵列阵型变化情况
在已知拖线阵的实际阵形后,在工作时需要避免的影响多分枝拖曳线列阵系统探测效果的阵型变化主要包括两类:
1) 两拖线阵水听器所在线阵的组合阵型变化,若线阵间距离变化过大,则不能很好地利用拖线阵水听器所接收的信号进行波束形成。
2) 信号发射气枪与拖线阵水听器所在线阵之间的阵型变化。信号发射装置与接受装置的位型变化过大会极大影响装置的工作效果。
各线缆的长度动辄达到百米量级,在对线阵做水动力分析时若尽数分析各个节点,工作量过大。因此,需要优先探究一种有效、简便的方法来衡量线阵的阵型变化剧烈程度。
阵列A、阵列B在y轴上的位置偏移、偏移方差变化沿缆长方向的分布情况见图7,其中x轴缆长分布的数值刻度以各线阵的End A端为0刻度开始。在所有缆长170 m的范围内,阵列A、阵列B在y轴上的位置偏移极大值都处于两阵列的尾端,分别为2.030 9 m、1.014 6 m;两线阵的偏移方差的极大值则分别处于各自线阵的首端,分别达到了3.628 m、2.169 5 m。因此,可以说明在y轴上线阵两端的偏移最激烈的地方处于各自线阵的尾端部分,其偏移变化情况最激烈的地方则处于各自线阵的首端部分。
阵列A、阵列B在y轴上的加速度、加速度方差变化沿缆长方向的分布情况见图8,观察发现:在所有缆长为170 m的范围内,线阵A、线阵B在y轴上的加速度极大值都处于两线阵的首端,分别为-0.025 9 m/s2、-0.029 9 m/s2,两线阵的加速度的方差的极大值也分别处于各自线阵的首端,分别为2.301 8 m/s2、0.580 3 m/s2。因此,在y方向上线阵两端的偏移以及偏移变化情况最激烈的地方都处于各自线阵的首端部分。
阵列A、阵列B的首、尾端间距偏移时域上的变化情况见图9。阵列A、阵列B的设计间距为55.126 m。图9中y轴表示相对设计间距A、阵列B间距的偏差大小。阵列A、阵列B的首、尾端间距均呈现周期性间距变化程度。
阵列A、阵列B的阵型平行情况见表3,分别描述了阵列A、阵列B在沿母舰前进方向的法向的相对偏移的平均值及标准差值。由表3可知:相对偏移的平均值均为负,这说明首、尾端的变化幅值有明显的差距,尾端变化幅值明显小于相应的首端偏移;随着拖曳母舰减速幅度增大,相对偏移的平均值逐渐减小,但其标准差提高较大,相对于未减速状态其变化剧烈程度提高50.11%,这说明若减速制动过程中加速度过大,会导致阵列自身的摆动加剧从而使得分支阵列难以保持平衡。因此,在减速制动过程中阵列A、阵列B无法继续保持平行前进。
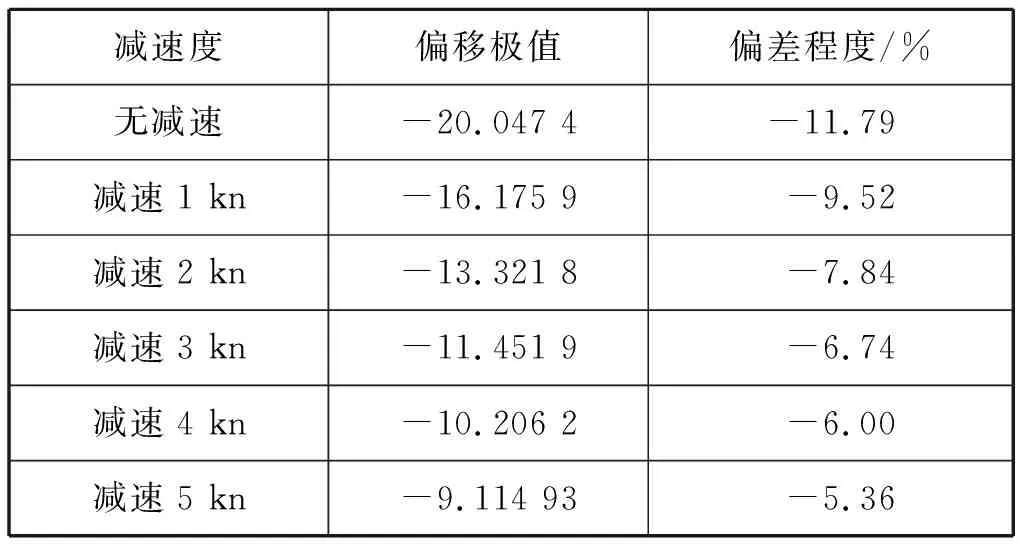
信号发射气枪与信号接收分支阵列A间距偏移时域上的变化情况见图10。信号发射气枪与信号接收分支阵列A的偏差程度百分比见表4,信号发射气枪与信号接收分支阵列A的设计间距为67.281 m。由表4可知:在位情况下,信号发射气枪与信号接收分支阵列A间距均呈现周期性的振荡变化,间距逐渐减小的趋势,这是在前进过程中流体阻力及阵列本身的惯性原因,信号发射气枪与信号接收分支阵列A逐渐靠近;随着拖曳母舰减速幅度增大,信号发射气枪与信号接收分支阵列A间距偏移幅度均逐渐减小,与未减速状态相比,30 s内减速5 kn情况的收发信号装置的偏差程度由-11.79%降至-5.36%。这说明母舰减速缓和了信号发射气枪与信号接收分支阵列A的间距变化程度。

表3 阵列A、B阵型平行程度
减速度偏移极值偏差程度/%无减速-20.047 4-11.79减速1 kn-16.175 9-9.52减速2 kn-13.321 8-7.84减速3 kn-11.451 9-6.74减速4 kn-10.206 2-6.00减速5 kn-9.114 93-5.36
综上所述:在减速制动过程中,在流体阻力及阵列本身的惯性等作用影响下,阵列A与阵列B、信号发射气枪与信号接收分支阵列A均逐渐靠近;母舰减速缓和了阵列变形状态的间距变化;若减速制动过程中加速度过大,会导致阵列自身的摆动加剧从而使得分支阵列难以保持平衡。因此,在减速制动过程中阵列A、阵列B无法继续保持平行前进。
3 结束语
综合分析结果,可以得出以下结论:
1) 由于模拟中的阵列A、阵列B长度达170 m,因此,在评价阵型变化时无法尽数讨论线阵上的各个点的变化,为节省计算量,简化分析过程,可通过讨论阵列首、尾端的变化来衡量线阵的阵型变化剧烈程度。
2) 母舰的拖曳速度减小后,阵列A、阵列B声学段张力会响应地减小;拖曳母舰减速幅度越大,阵列A、阵列B的内张力衰弱幅度越大;声学段内张力呈现稳定的周期性振荡,并未出现较大幅度的突变,也未产生鞭击效应,母舰的减速与否并不影响张力的变化周期,母舰减速过程对于其所拖曳的多分枝线列阵的线阵声学段的安全保障性能及工作稳定性不存在影响。
3) 在减速制动过程中,阵列间以及阵列与信号发射气枪均逐渐靠近,母舰减速缓和了阵列变形状态下的间距变化;若减速制动过程中的加速度过大,会导致阵列自身的摆动加剧从而使得分支阵列难以保持平衡。因此,在减速制动过程中阵列A、阵列B无法继续保持平行前进。
4) 母舰减速制动不影响其所拖曳的多分枝线列阵的线阵声学段的安全保障性能及工作稳定性,但若减速度过大或减速冲时过少,会导致阵列自身的摆动加剧从而使得分支阵列难以保持平衡,无法精确预报拖曳线列阵声纳的位置和构型姿态,出现阵型畸变后探测性能下降、甚至无法工作的状态。
猜你喜欢
中国畜禽种业(2022年8期)2022-09-17
军事文摘(2022年11期)2022-06-24
快乐学习报·教育周刊(2021年16期)2021-10-12
地震研究(2021年1期)2021-04-13
小学生学习指导·小军迷联盟(2019年2期)2019-09-10
动漫界·幼教365(中班)(2018年6期)2018-05-14
喜剧世界(2016年3期)2016-11-26
冰雪运动(2016年5期)2016-04-16
体育科技(2015年4期)2015-12-21
