
基于AIS数据的船舶领域建模
2019-01-07 05:50文元桥王玉宾张义萌周春辉
中国航海 2018年4期
文元桥, 王玉宾, 张 帆,, 张义萌, 黄 亮, 周春辉,
(武汉理工大学 a.智能交通系统研究中心;b.航运学院;c.内河航运技术湖北省重点实验室, 武汉 430063)
随着船舶的大型化和高速化发展,船舶在水上航行的风险也在逐渐增加,船舶领域作为研究水上交通安全的一个重要指标,对避碰和风险的研究具有重要意义,也为决策者提供理论依据。FUJII等[1]借助雷达数据构建对称椭圆船舶领域模型。GOODWIN[2]根据船舶号灯号型将船舶领域分为3个扇形。TAK等[3]对前人船舶领域模型进行改进,构建领域中心存在偏移的船舶领域模型。赵劲松等[4-6]在GOODWIN所提出的模型基础上,通过计算船舶之间的避碰时机和最小会遇距离(Closest Point of Approach,CPA),并结合模糊数学理论建立模糊船舶领域模型。孙立成[7]以调查问卷的方式统计分析船舶驾驶员的避碰行为,得到在海上开阔水域中船舶之间避让所需的距离。毕修颖等[8]根据船舶的避碰行为建立船舶动态避碰行动领域模型,并得到船舶碰撞危险度会对船舶领域有一定影响的结论。文献[9]和文献[10]通过不同的方法构建不同的船舶领域模型。同时,船舶领域又受多方面因素影响,邓顺江[11]分析内河桥区水域气象水文及船速对船舶领域边界的影响。GUCMA等[12]利用船舶会遇过程中的CPA建立在不同会遇类型下的船舶领域模型。向哲等[13]利用AIS数据将目标船周围船舶网格化,通过叠加周围船舶在网格中的分布频数来获得不同尺度下的船舶领域特征。
由于传统的船舶领域模型受到数据来源的限制,可能导致领域统计所需数据不足的问题。随着船舶自动识别系统(Automatic Identification System,AIS)设备的普及,海量的AIS数据为水上交通安全研究提供了丰富的信息。人、船、环境对船舶行为的影响都在AIS数据上有一定的反映,因此,通过AIS数据建立船舶领域模型更加准确和真实。同时,上述利用AIS数据建立的船舶领域模型大多基于网格密度统计的方法获取船舶领域,这就造成在网格内存在重复统计和不够精确等问题。基于此,本文利用AIS数据提出一种针对船舶间相对运动,计算目标船到他船相对运动轨迹最近距离的船舶领域统计方法模型。
1 船舶领域统计模型
船舶领域是船舶在航行过程中不允许他船“侵入”的一块水域,船舶在航行过程中,相互之间都保持着一定的距离,该距离可作为统计船舶领域的指标,随着时间的累积,可得到目标船的周围船舶距其距离最近时的位置分布情况。由于该指标又受多种因素的影响,因此船舶领域的大小和形状也随着该指标的度量结果的不同而不同。基于AIS数据建立船舶领域模型应选取具有典型特征的AIS数据进行研究,如对典型水域的船舶、典型类型的船舶领域进行统计分析,将具有相同特征的船舶归为一类,计算特定类型目标船与他船相距最近时他船的相对目标船的位置分布,利用样本估计的方法,确定船舶领域的形状和大小。因此,本文的领域统计方法模型可概括为样本选取、轨迹拟合、船-船最近距离求取和样本估计等4部分。
1.1 样本选取
船舶领域受多种因素的影响[14],在对船舶领域进行研究时,可将同种类型(如船长相同、航速相同等)的船舶归为一类作为目标船,选取该特定类型的船舶作为样本进行研究,为简化模型和便于计算,将船舶看作质点,以船舶中心位置代替船舶位置。某块水域内在某段时间内某种特定类型的船舶航行轨迹为
S={Si|Si,i=1,2,3,…,n}
(1)
式(1)中:Si为目标船i的轨迹;n为船舶数量。目标船i的轨迹则为
(2)

1.2 轨迹拟合
将船舶i作为目标船,搜索船舶i周围最近的船舶。由于AIS基站不能同时发送目标水域所有船的信息,因此,每条船之间存在一定的时差,使用数据插值的方法将他船的位置推算至目标船同步的时刻,保证信息同步;在tk时刻船舶i周围船舶为
(3)
式(3)中:n为在tk时刻船舶i周围船舶的数量。假设第j条船距船舶i距离最近,那么在tk时刻距船舶i最近的船舶为
(4)
船舶i在某块水域航行时的m个时间段内,其周围最近的船舶为
(5)
在tk时刻,船舶i与船舶j之间的距离为d(i,j)(tk),船舶i与船舶j之间的相对方位为rb(j,i)(tk),rb(j,i)(tk)为从船舶i与船舶j中心连线到船舶i航向线之间逆时针方向的夹角,其范围为0°~360°,且rb(i,j)(tk)≠rb(j,i)(tk)。
以船舶i中心为坐标原点,以船舶i的航向方向为y轴正方向,以船舶i的右正横方向为x轴正方向,则船舶j相对于船舶i的位置为
xj,i(tk)=d(i,j)(tk)×sin(rb(j,i)(tk))
yj,i(tk)=d(i,j)(tk)×cos(rb(j,i)(tk))
(6)
船舶i在m个时间间隔内,其周围最近船舶的相对位置为
ARi={ck|ck=(tk,xj,i(k),yj,i(k))T,
k=1,2,3,…,m}
(7)
式(7)中:m为船舶i的轨迹点个数。
在时间间隔k较短的时间内,在几个相邻时刻,船舶i周围最近的船舶为同一条船。假设在t1~t2时刻内,船舶i周围最近的船舶为j船,那么有
Ji(t1,t2)={rk|rk=(tk,xj,i(k),yj,i(k))T,
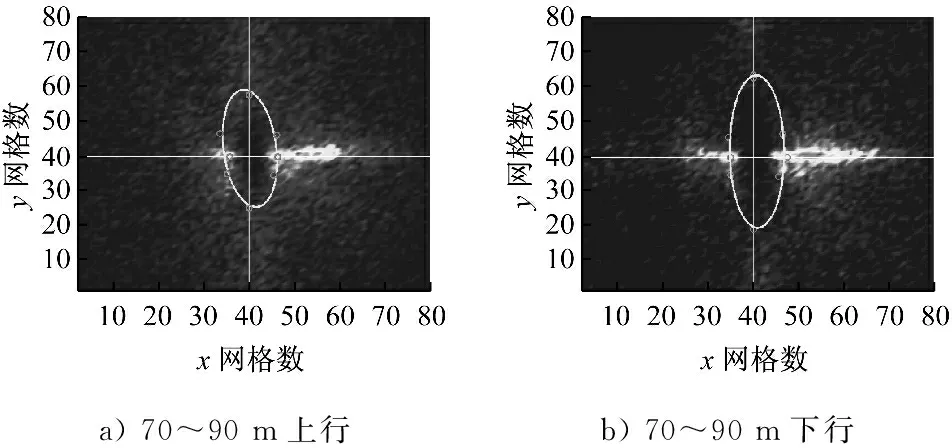
t1 (8) 式(8)中:Ji(t1,t2)为在t1~t2时间段内船舶j相对船舶i的运动轨迹,该轨迹由一系列散点所组成。由于船舶的运动是连续的,因此采用最小二乘法对该轨迹进行轨迹拟合。 设船舶j相对于船舶i运动的轨迹曲线方程为f(x),那么船舶i到船舶j的最近距离则可看作是船舶i到曲线f(x)的最近距离见图1。 设目标船i到f(x)最近距离为d时船舶j的相对坐标为(xj,i(d),yj,i(d)),则在t1~t2时刻内当两船相距最近时的船舶j相对于船舶i的位置为 qt1,t2=(d,xj,i(d),yj,i(d)) (9) 设船舶i周围他船共有w条轨迹,则船舶i周围最近船舶的相对位置为 Qi={qz|qz=(dz,xj,i(dz),yj,i(dz))T, z=1,2,…,w} (10) 式(10)中:w为轨迹段总数;qz为轨迹z在一段时间内船舶j相对船舶i运动时的距离最近时的相对位置。 U={Qi|i=1,2,…,p} (11) 式(11)中:p为某类型船舶的个数。 通过搜索特定类型船舶周围最近船舶的相对位置分布,得到他船相对目标船的运动轨迹,进而计算目标船到他船轨迹的最近距离,构建出特定类型船舶的领域统计模型。 为确定船舶领域边界,需要确定领域的边界点。本文利用获取到的目标船周围船舶的分布作为样本,对该样本进行样本估计。 根据目标船周围船舶的分布,采用等距抽样的方法将目标船周围按照一定的角度划分为若干区域。由于船舶的艏艉方向和正横方向是船舶的关键特征点,此外再取45°、135°、225°、315°方向上共8个点作为确定船舶领域的边界点,因此,可根据8个边界点将以目标船为中心的周围区域划分成8个区域(见图2)。 按照所划分的区域,将特定类型目标船周围最近的船舶U按区域划分,分别对各个区域内的目标船周围最近船舶到目标船的距离d的分布进行统计分析见图3a),并在每个区域的中线方向上表示出该区域周围船舶到目标船的距离分布见图3b)。 a) 目标船周围最近船舶到其距离的分布b) 周围船舶到目标船的距离的分布 图3 距离分布图 假设目标船与周围船舶距离分布是连续的,其分布函数为f(x)。由于船舶领域受多种因素的影响,如人为操纵和会遇类型等都会对船舶领域产生一定的影响,在计算确定船舶领域过程中,需要将这些因素考虑在内,因此每个方向给定一个显著性水平α,则在每个方向上有 (12) 式(12)中:α为显著性水平;Dmin为某方向上目标船到周围船舶的最小距离;f(x)为某方向上周围船舶到目标船最近距离的概率密度分布函数;D为某方向上显著性水平为α时距目标船的距离。 根据每个方向上距目标船的距离D,可得到在每个方向上船舶领域的边界点;然后利用最小二乘法以椭圆去对所得到的领域边界点进行拟合,即得到船舶领域的形状和大小。 第三,在我们话剧创作当中的工业题材,建国以来到现在都是短板。农业题材非常丰富,战争、历史都很多,唯独工业题材少,尤其是好的少。这部戏写的是地地道道、标标准准的工业题材,从艺术角度来讲也非常好。 考虑到船舶在航行中都会与周围的船舶保持一定的安全距离,对于单条船,随着时间的推移,其周围的船舶会不断出现。选取一条船作为目标船,通过搜索该目标船周围距其最近船舶的航行轨迹,找到目标船距每条轨迹距离最近时他船的位置,即可得到单条目标船周围最近船舶相对目标船的位置分布。单条船舶周围最近船舶分布不足以说明问题,将具有相同特征的船舶作为特定类型的目标船,叠加每条特定类型目标船周围最近船舶的相对位置分布,随着数据量的不断增大,不同类型的目标船周围最近船舶的相对位置分布将呈现一定的特征。特定类型目标船周围最近船舶的搜索计算的伪代码见Algorithm 1。 Algorithm 1 目标船周围最近船舶 Input:AIS数据Data,特定类型目标船MMSIOutput:特定类型目标船周围最近船舶相对目标船的位置分布PT根据目标船MMSI从AIS数据中筛选出目标船的数据SAR←Ø,PT←Øfor目标船个数p do 目标船p的数据s 将s按照时间间隔k进行插值s←s while s中时间间隔数do 以时间为索引,搜索Data中除目标船以外t-ΔT,t+ΔT的船舶 将这些船舶与目标船进行时间同步,得到同一时刻船舶数据 根据该时刻下距目标船最近的船舶更新AR end whileend for以时间和MMSI为索引,将AR分成n条轨迹for轨迹条数n do 根据AR每条轨迹上的相对位置坐标点,对轨迹曲线进行拟合 根据原点到轨迹曲线的最近距离更新PTend for AR为目标船周围最近船舶的集合;PT为目标船到周围船舶的相对运动轨迹距离最近时他船的位置集合。 根据PT中所得到的位置和距离信息,按照第1.3节中的方法,得到每个区域内点,以每个区域内点到原点(目标船)距离为指标,将距离分为若干区间,分别统计各个区间内出现的频次和频率。将每个区间中点值作为该区间的值,以频率近似替代样本概率。假设目标船到周围最近船舶的距离分布是连续的,利用MATLAB曲线拟合工具箱CFtool对区间上系列点及其概率进行拟合,即可得到每个区域内目标船到周围船舶的距离的概率密度分布函数f(D)。 确定8个方向的边界点后,将其依次连接所得到的不规则图形即可认为是船舶领域。但由于交通系统的复杂多变,同时为使船舶领域能够便于应用到水上交通安全中,需要对该不规则图形进行拟合。本文利用最小二乘法以椭圆方程对所得到的一系列边界点进行拟合,根据椭圆一般方程Ax2+Bxy+Cy2+Dx+Ey+F=0,可求得各个参数,即得到船舶领域边界和大小。 选取长江荆州渡船区域2016年5月至2017年3月共11个月的数据,通过上述模型对不同类型和不同尺度船舶的船舶领域进行分析。由于受传输、解码等因素的影响,需对AIS数据进行预处理,将重复数据和异常数据剔除,选取航速2 kn以上的船舶。对该块水域数据进行统计得到共有船舶样本共计3 658条。为研究不同类型船舶的船舶领域差异,选取该区域内2条横渡长江汽渡船作为直航船,选取除汽渡船以外的其他船舶作为直航船,按照第1节中的模型,分别构建横驶船舶和直航船舶领域模型,对比分析横驶船舶与直航船舶的船舶领域差别;为研究不同尺度船舶的船舶领域的不同,以船长作为尺度分类标准,选取1 292条70~90 m船舶与1 174条90~110 m船舶,构建两种尺度下的船舶领域模型,并对比分析其特征。 按照第1.1节和第1.2节船舶领域统计模型,得到横驶船与直航船其周围最近船舶的相对位置见图4。图4中坐标(0,0)为目标船位置,纵轴方向为船长方向,横轴方向为目标船正横右方向。 由图4可知:目标船周围呈现出一小块空心的区域,这也验证了船舶领域的存在。此外,横驶船周围船舶多分布在船舶两侧,在艏艉方向分布较少,这与实际相符。直航船在航道中航行时其前后方都有较多的船舶,同时由于渡船的存在,直航船两侧船舶分布较多,同时靠近沙市一侧为下行船,靠近埠河一侧为上行方向,因此直航船在航行过程中其右侧船舶多于左侧,这与图4b)也是符合的。 为确定横驶船与直航船的领域边界,按照第1.3节所述方法,将以横驶船和直航船为中心的周围区域分为8个区域。将上述得到的特定类型目标船周围最近船舶的坐标按照第1.2节所述8个区域进行划分,得到各个区域内他船的相对位置分布。分别统计每个区域内他船到目标船的距离,得到各个区域的他船相对目标船的距离分布,然后根据所给定的显著性水平α和距离分布情况求得各个方向上到目标船的距离。横驶船周围最近船舶在区域III内到目标船距离分布情况见图5。 由图5可知:根据区域III内的距离分布和给定的显著性水平α,可以确定在90°方向(正横右)距目标船中心的距离D,即可得到该方向上的一个领域边界点。按上述方法给定α值为0.05,分别计算横驶船舶和直航船舶各个方向上的领域边界点,然后对领域边界点进行拟合,为便于观察,将目标船周围的他船分布以密度的形式表现出来,所得横驶船舶与直航船舶领域结果见图6。 图6中两条白线的交点为目标船中心,圆圈代表船舶领域边界点平移到密度图坐标轴后的坐标,横坐标x和纵坐标y为网格数,网格大小10 m×10 m。考虑到横驶船领域的特殊性,在对横驶船的领域边界点拟合过程中,将其分为一、四象限和二、三象限分别进行拟合。由图6a)可知:横驶船舶周围最近船舶多分布在其两侧,直航船周围最近船舶也大多数分布在两侧,同时右侧船舶密度高于左侧。通过对比图6a)和图6b)可知:横驶船舶的船舶领域与直航船舶的领域在形状上有很大的差异,横驶船舶的领域在艏向较窄,在艉向较宽;直航船领域在艏艉宽度相对比较均匀。横驶船舶在横穿主航道时,会经常与航道内航行的船舶会遇,而渡船经常作为让路船,会遇时过他船艉,因此其领域会呈现艏较窄而艉较宽的现象;直航船舶在航道内航行,多数情况沿航道方向航行,周围船舶多分布在两侧,因此其领域形状不同于横穿航道的横驶船舶。 船舶尺度对船舶领域有很大的影响,尤其是船舶长度。为研究船舶尺度对船舶领域的影响,选取研究水域内除渡船以外的70~90 m和90~110 m两类船舶的船舶领域进行对比分析。同时,船舶在航道中航行时分为靠近沙市的下行方向和靠近埠河的上行方向,通常上行船舶航速小于下行船舶航速,为研究航速与船舶领域之间的关系,将每一种尺寸的船舶分为上行船舶、下行船舶。 按照上述分类标准,根据第1.1节中船舶领域统计模型,分别对4类目标船周围最近船舶相对其运动的轨迹最近距离时刻的相对位置分布进行统计,得到图7。 为进一步确定船舶领域的边界,用第1.4节所述方法,同样取显著性水平α为0.05,分别计算各类目标船各个方向上的领域边界点,并对领域边界点进行拟合得到见图8。将其周围的他船相对位置分布以密度图的形式表示出来。 从图7和图8可知:对于每一类船舶,其周围最近船舶大多数分布在其两侧,并且由于渡船的存在,右侧船舶数量多于左侧;上行船舶由于航速较慢,通过该块水域所需要的时间更长,并且上行航道距岸边具有更宽的水域。因此,上行船舶周围最近船舶分布比下行船舶周围最近船舶分布多。 a) 70~90 m上行b) 70~90 m下行 分别计算4类目标船拟合后的领域大小,得到70~90 m上行、70~90 m下行、90~110 m上行、90~110 m下行目标船的领域长度分别为329 m、440 m、342 m、473 m,宽度分别为108 m、130 m、115 m、139 m。由领域计算结果可知:不同尺度的船舶其领域大小不同,无论是上行船还是下行船,领域长度随船舶长度增大而增大,而领域宽度随船舶尺度的变大有略微的增大;对于相同尺度的上行船舶和下行船舶,上行船舶的领域长度比下行船舶领域长度小,这是由于上行船舶航速比下行船舶的航速小,而领域的宽度也有小幅度的增大。由图8可知:上行船的船舶领域与下行船的船舶领域相比,存在明显向左倾斜的倾角,经实地调研发现,此处上行船舶靠近埠河一侧航行,下行船舶靠近沙市一侧航行,上行船舶在航行时其左侧离岸边较远,有更宽阔的可航水域,同时由于上行船舶航速较小,由于渡船的存在,上行船舶与下行船舶会遇过程中的避让行为导致上行船舶与下行船舶的船舶领域相比存在一定的偏角;此外,对比各类船舶领域的艏向与艉向领域长度发现,领域在艏向长度大于艉向长度,这是因为船舶在航行过程中,在艏向应该有更大的安全距离以保证其航行安全。 本文利用AIS数据,构建船舶领域统计方法模型,并根据目标船周围最近船舶的相对位置分布情况,采用最小二乘法确定领域边界;利用荆州AIS数据对模型进行验证,并对比分析横驶船舶与直航船舶的船舶领域,得出横驶船舶领域与直航船舶领域形状特征的差异;对比不同尺度的上行和下行船舶的船舶领域,得到船舶尺度、航速对船舶领域大小的影响,为船舶在水上航行时的避碰和风险研究提供一定的理论依据。1.3 船-船最近距离求取
1.4 样本估计

2 算法设计
2.1 特定类型目标船周围最近船舶分布

2.2 概率密度函数
2.3 边界拟合
3 实例分析
3.1 AIS数据选取
3.2 横驶船舶与直航船舶领域
3.3 不同尺度船舶的船舶领域
4 结束语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
船舶(2021年4期)2021-09-07
疯狂英语·新读写(2021年6期)2021-08-05
读友·少年文学(清雅版)(2020年4期)2020-08-24
儿童故事画报(2020年7期)2020-08-03
读友·少年文学(清雅版)(2020年3期)2020-07-24
小学科学(2020年6期)2020-06-22
水上消防(2019年3期)2019-08-20
船舶标准化工程师(2019年4期)2019-07-24
