基于人工势场法的移动机器人动态路径规划
2019-01-04 07:53张希闻肖本贤
山东农业大学学报(自然科学版) 2018年6期
张希闻,肖本贤
基于人工势场法的移动机器人动态路径规划
张希闻1,2,肖本贤1,2
1. 合肥工业大学电气工程与自动化学院, 安徽 合肥 230009 2. 合肥工业大学工业与装备技术研究院, 安徽 合肥 230009
目前移动机器人越来越多地被用于物流仓库中进行劳动力的解放。本文采用改进人工势场法代替传统的人工势场法进行动态路径规划,其中引用了A*算法的一些思路来弥补传统人工势场法容易形成局部最优解的不足。在实验室环境下,针对动态的障碍设计出一条更为快捷的避障路径。当障碍存在而可能使移动机器人掉入陷阱时,采用障碍连锁法将障碍连接,形成新的障碍,使得移动机器人顺利通过陷阱。
移动机器人; 动态路径规划; A*算法; 人工势场法
作为自动控制研究的一个重要方向,路径规划一直被我们迫切需求着。在一个障碍已知或未知的封闭区域中对机器人进行路径规划是当下的一种研究热点,而障碍已知的环境中,障碍又分为静态障碍和动态障碍,动态障碍使用一般的算法如:A*算法、蚁群算法、F*算法,解决的相对较为复杂。作为虚拟力场算法的代表,人工势场法以他的最优性、快捷性显得尤为突出。作为一种较为完善的方法,人工势场法能更好的躲避动态的障碍。快捷的运算、实时性的避障成为了人工势场法的主要优点,不过此算法也并非是尽善尽美,其主要的实时性具有一些瑕疵,比如,它只关注局部的最优解,而并没有视全局的最优解。本文主要思路是使用改进的人工势场法来弥补传统人工势场法局部最优解的缺陷,使用A*算法生成一定数量的节点,然后以人工势场法连接节点与节点减少局部最优解的生成。先以A*算法做静态路径规划生成大量的节点,在节点与节点之间使用人工势场法,这样可以优化人工势场法目标点过远造成的引力场过大的问题。不但可以提高运算效率而且还能减少路径长度。将二者结合起来更有效的进行动态障碍规避。
当移动机器人陷入了障碍陷阱时,即移动机器人形成了徘徊抖动状态,本文拟用连锁障碍法。即先对障碍进行一次判定,然后将障碍陷阱采取障碍连锁形成新的障碍结构,确保改进人工势场法可以顺利通过该处。
A*算法本身路径不具有人工势场法的平滑性和动态障碍的规避能力,二者取长补短、相得益彰。不但可以进行动态的路径规划,而且可以使得路径较为平滑并且能够防止由于远点终点的引力场过大造成的局部最优解的情况发生。
1 相关算法
本文采用的是改进人工势场法进行动态路径规划。
1.1 人工势场法
人工势场法的思路是在建模后的仓库中假设有虚拟的引力场和斥力场存在,二者的作用平衡使得移动机器人能够躲避障碍。终点的引力与移动机器人和终点的距离成正比;障碍和移动机器人之间的斥力与障碍和移动机器人之间的距离成反比。在二者的综合作用下,移动机器人会找到一个力的平衡点,从而生成一个从初始位置到终止位置的路径规划。这其中,引力势场函数为:

公式中,为移动机器人现在的位置,X为目标点的位置,0为路障的位置,K为引力势场的常数,K为斥力势场常数,0障碍造成的威胁的距离的最大值。
由引力势场公式和斥力势场公式的负梯度延伸出引力势场函数和斥力势场函数公式如下:

人工势场法在较为简单的环境中具有不错的路径规划能力,从初始点到终止点的无碰撞路径可以简单快捷的生成。但是一旦环境变得复杂,人工势场法马上会出现相应的问题,诸如极限值点造成的局部最优解问题,原理也较容易理解,即为局部障碍物过多从而引力斥力抵消造成了移动机器人判定为此时合力为0,生成局部最优解。
1.2 A*算法
A*算法是启发性避障的路径规划算法,可以在航空,游戏,物流等多种领域发挥重要的作用。普通的情况下,A*算法的下一次行动方向由八种可能所构成,即:左、上、右、下、左上、右上、左下、右下。采用估价函数法对A*算法进行一种双重估价,即:()=()+()


1.3 连锁障碍法
人工势场法对每个障碍处理是分开,即每个障碍的均被视为有单独的斥力场,但是有限障碍存在一种类似于陷阱的结构,即当移动机器人移动至此位置时会形成多个障碍的斥力场与引力场构成的力平衡,从而无法进行下一步的移动,即掉入陷阱状态,反复徘徊抖动停滞不前。判定掉入陷阱状态,本文取阈值,当一个障碍物周围存在至少两个距离它的距离小于阈值的障碍物时,本文即视为此处为障碍陷阱,此时本文拟用障碍陷阱连锁法,将陷阱周围的障碍之间的可行走区域进行连接,从而生成一个新的“障碍”。再从节点向下一个节点出发。如图1和图2所示
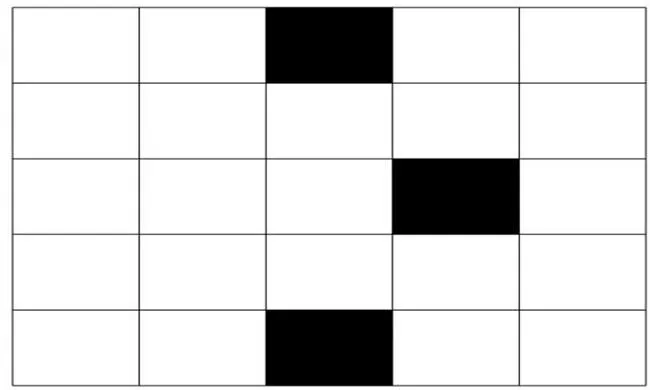
图 1 障碍陷阱
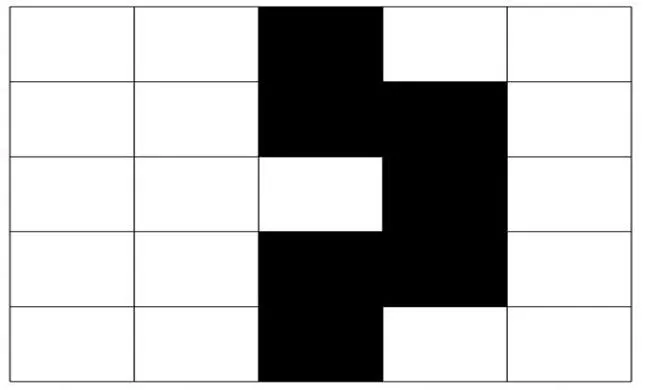
图 2 连锁障碍
2 改进人工势场法
2.1 仓库建模


图 3 仓库
2.2 改进人工势场法
针对人工势场法在障碍较多时出现的局部最优解问题,本文拟采用先使用A*算法生成节点,然后在节点间使用人工势场法的方法,来优化局部最优解的问题,即先将动态障碍固定使用A*算法进行全局路径规划,A*算法在全局路径规划后会生成一定数量的节点,作为根据,保留这些节点,用人工势场法在节点间分别进行路径规划,不但可以改进人工势场法距离目标点过远造成的引力场过大而且还可以改进A*算法不可进行动态路径规划和路径不够平滑的缺点。结合二者的优势形成改进人工势场法。
与此同时,本文针对人工势场法的移动机器人遇陷阱徘徊抖动问题采用障碍连锁法,当一个障碍周围至少存在两个障碍与其距离小于阈值,本文即视为此处存在障碍陷阱,易使移动机器人陷入徘徊抖动状态,采取将障碍连锁形成新的障碍的方法可以有效的避免障碍陷阱的威胁,使得移动机器人更好的利用改进人工势场法进行动态路径规划。方法流程图如图4所示。
图 4 流程图
3 仿真与实验
为了证明本文思路,本文分别进行了传统人工势场法的路径规划和本文改进后的人工势场法进行路径规划,对比了路径长度、障碍陷阱躲避等方面。本文在15乘15栅格中的仓库中进行路径规划,使用的计算机设备:Window10操作系统。CPU为i7-7200U,内存为4 G。
图5和图6为15乘15仿真实验,其中线条左下起始点为路径起始点,线条右上终止点为路径终点,黑色方格为静态障碍,绿色方格为动态障碍,蓝色为A*算法生成的节点。线为规划出的路径,图中可以看出,改进人工势场法对于障碍陷阱有更为合理的处理,并且规划出的路径较原人工势场法更为合理。路径更为平滑,且可以合理规避障碍。二者对比结果如表1所示。
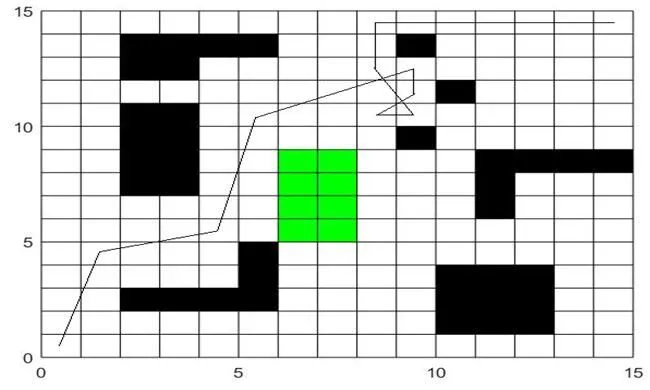
图 5 原算法结果
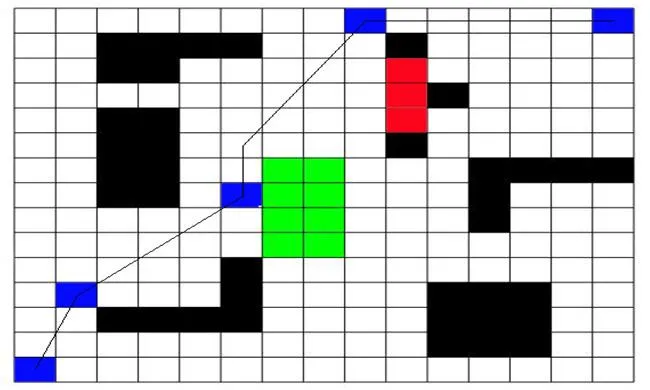
图 6 改进算法结果
移动机器人实验如图7所示。
为了验证本文改进后的算法产生的结论,实验建立在机器人操作系统上进行。移动机器人具有通过相机采集外界数据功能,可以准确的获取环境因素和障碍因素。经过计算生成一种具有三个维度的点云数据,然后转化为激光模拟的数据,依靠和模块建模二维地图栅格。接下来使用_里面的以及共同协作完成全局和部分路径生成。
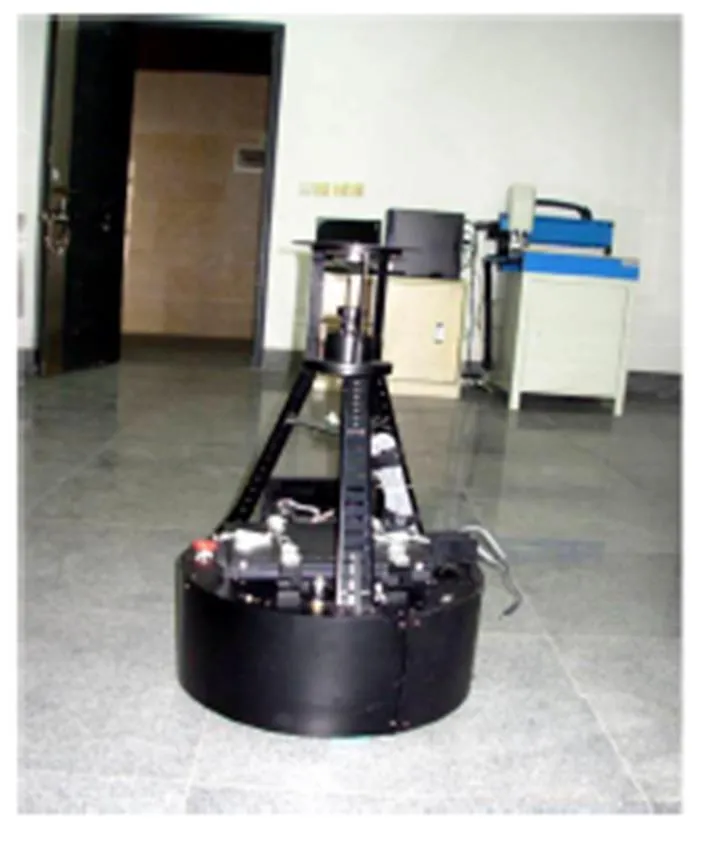
图 7 移动机器人
4 结束语
综合上面的实验、数据和大量的理论知识,本文改进后的人工势场法相较原来的人工势场法能更好的进行全局的路径规划,而不是形成局部极小值,从而陷入局部最优解的尴尬境地,这个办法对A*算法取长补短,多个节点的提取使得引力场和斥力场的作用更为合理,取得了一定的效果。但是也有一些不足,比如需要A*法来生成节点,后续工作希望找到一种可以替代A*算法生成节点的算法,对于人工势场法做更好的补充。
[1] 何雨枫,曾庆化,王云舒,等.室内微型飞行器实时路径规划算法研究[J].电子测量技术,2014,37(2):23-27
[2] Ahmed SU, Akhter A, Kunwar F. Cellular automata based real time path planning for mobile robots[C]. IEEE:12th International Conference on Control Automation Robotics & Vision (ICARCV), 2012:142-147
[3] 丁琳,管小卫,朱霞.基于RSSI的集群实时定位系统设计[J].国外电子测量技术,2014,33(12):69-73
[4] Jeddisaravi K, Alitappeh RJ, Pimenta LCA,. Multi-objective approach for robot motion planning in search tasks[J]. Applied Intelligence, 2016,45(2):305-321
[5] 张殿富,刘福.基于人工势场法的路径规划方法研究及展望[J].计算机工程与科学,2013,35(6):88-95
[6] Bakdi A, Hentout A, Boutami H,. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robotics and Autonomous Systems, 2017,89(1):95-109
[7] 刘建华,杨建国,刘华平,等.基于势场蚁群算法的移动机器人全局路径规划方法[J].农业机械学报,2015,46(9):18-27
[8] 王殿君.基于改进A*算法的室内移动机器人路径规划[J].清华大学学报:自然科学版,2012,52(8):1085-1089
[9] Zhou ZP, Nie YF, Gao M. Enhanced ant colony optimization algorithm for global path planning of mobile robots[C]. IEEE: International Conference on Computational and Information Sciences, 2013:698-701
[10] Ardiyanto I, Miura J. Real-time navigation using randomized kino dynamic planning with arrival time field[J]. Robotics and Autonomous Systems, 2012,60(12):1579-1591
The Planning for Dynamic Path of a Mobile Robot Based on Artificial Potential Field Method
ZHANG Xi-wen1,2, XIAO Ben-xian1,2
1.230009,2.230009,
At present,more and more mobile robots are used in a logistics warehouse to liberate the labor force. In this paper, the artificial potential field method was used to replace the traditional artificial potential field method for dynamic path planning. Some ideas of the A* algorithm were cited to make up for the traditional artificial potential field method in order to easily form a local optimal solution. In the laboratory environment, a faster approach to avoiding obstacles was designed aiming to dynamic obstacles. When there were obstacles to able to make robots fall into a trap, obstacles were connected to make some new ones to make the mobile robot successfully pass the trap.
Mobile robots; dynamic path planning; A* algorithm; artificial potential field method
TP242.6
A
1000-2324(2018)06-0937-04
10.3969/j.issn.1000-2324.2018.06.007
2018-03-14
2018-04-06
国家自然科学基金资助项目:基于采样控制的非光滑控制系统分析与综合(61304007)
张希闻(1992-),男,硕士研究生,研究方向:自动控制科学与工程. E-mail:zhangxiwen_zxw@sohu.com
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
汽车工程(2021年12期)2021-03-08
湖北汽车工业学院学报(2020年4期)2020-12-31
北京汽车(2019年4期)2019-09-17
制造技术与机床(2017年3期)2017-06-23
学苑创造·A版(2016年5期)2016-06-21
小雪花·成长指南(2014年10期)2014-10-31
小雪花·成长指南(2014年10期)2014-10-31
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28