改进的粒子滤波人体目标跟踪算法
2018-12-29 03:10徐胜,黄晁,孙松
无线电通信技术 2018年1期
徐 胜,黄 晁,孙 松
(1.宁波大学 信息科学与工程学院,浙江 宁波 315211;2.宁波中国科学院信息技术应用研究院,浙江 宁波 315040;3.宁波中科集成电路设计中心有限公司,浙江 宁波 315040)
10.3969/j.issn.1003-3114.2018.01.14
徐胜,黄晁,孙松.改进的粒子滤波人体目标跟踪算法[J].无线电通信技术,2018,44(1):69-72.
[XU Sheng,HUANG Chao,SUN Song.Improved Particle Filtering Human Target Tracking Algorithm[J].Radio Communications Technology,2018,44(1):69-72.]
改进的粒子滤波人体目标跟踪算法
徐 胜1,黄 晁2,3,孙 松1
(1.宁波大学 信息科学与工程学院,浙江 宁波 315211;2.宁波中国科学院信息技术应用研究院,浙江 宁波 315040;3.宁波中科集成电路设计中心有限公司,浙江 宁波 315040)
针对现有基于粒子滤波(PF)的行人目标跟踪算法跟踪精度不高、速度慢以及遮挡鲁棒性不好的问题,提出一种结合支持向量机(SVM)检测的改进跟踪算法。在跟踪的置信度小于阈值时进行行人跟踪目标的再检测,以校正跟踪位置。对粒子群优化(PSO)算法在优化时可能陷入局部解的现状,进行混沌粒子优化(CPSO)寻优全局解。实验结果表明,提出的算法在一定的粒子数目前提下精度优于其他基于粒子滤波的行人目标跟踪算法,有效降低PF所需粒子数,算法可实时跟踪。
粒子滤波;行人跟踪;混沌优化;支持向量机;遮挡
TN911.73
A
1003-3114(2018)01-69-4
2017-10-16
ImprovedParticleFilteringHumanTargetTrackingAlgorithm
XU Sheng1,HUANG Chao2,3,SUN Song1
(1.College of Information and Engineering,Ningbo University,Ningbo 315211,China; 2.Ningbo Institute of Information Technology Application,Ningbo 315040,China; 3.Ningbo Zhongke Integrated Circuit Design Center Co.,Ltd.,Ningbo 315040,China)
To solve the problem that the pedestrian target tracking algorithm based on Particle Filter (PF) is not accurate,slow and poorly shielded,a new tracking algorithm based on Support Vector Machine (SVM) is proposed.The pedestrian tracking target is re-detected to correct the tracking position,when the tracking confidence is not enough.For particle swarm optimization algorithm may fall into the local solution in the optimization,the chaotic particle optimization algorithm is adopted.The experimental results show that the proposed algorithm is better than other particle filter based algorithms on a certain number of particles,and effectively reduces the number of particles required for PF.The algorithm can realize real-time tracking.
particle filtering;pedestrian tracking;chaotic particle swarm optimization;support vector machines;shelter
0 引言
目标跟踪是计算机视觉领域中的一个重要分支课题,其中人体目标跟踪应用广泛,如涉及到的有智能交通、监控安防、人机交互系统等。近年来随着新的算法的提出和深度学习的引入使得视觉目标跟踪技术迅速提升,但实际应用中仍有问题待解决,例如多变环境、多目标、快速移动尺度变化等难题。行人跟踪方法和其他视觉目标跟踪基本一致,可分为基于模板和基于检测的方法。基于模板的方法需要先对目标进行建模,跟踪过程中比较候选区域与模板的相似度来判断是否是目标;基于检测目标跟踪则需要相应的检测器,近年来发展的相关滤波算法和深度学习模型在跟踪效果上表现优秀。
粒子滤波跟踪(Partial Filter,PF)[1]作为较经典的跟踪算法,具有非线性、非高斯的特点,在行人、车辆人脸等目标跟踪中应用广泛。在实际应用中由于粒子滤波本身的局限性以及应用中的不同需求,涌现了许多改进的粒子滤波跟踪方法。如为解决单一特征的弱鲁棒性进行了多特征的融合[2]、针对粒子退化问题的粒子优化[3-5]等,以及对跟踪目标框的自适应改进等。针对特定问题的相应改进分别解决了实际中的特定问题[6-9],但无论是较经典的粒子滤波跟踪算法合适近来新兴的相关滤波和神经网络跟踪模型都会存在目标在遮挡和丢失时不能够在继续跟踪的情况。
针对这一问题提出在粒子滤波跟踪框架中结合检测的办法来实现鲁棒跟踪,实验选择的跟踪框架为粒子滤波跟踪算法。行人目标检测器使用的是支持向量机(Support Vector Machine,SVM),训练简单时间短、检测率高。
1 改进粒子滤波跟踪算法
1.1 PF粒子滤波算法概述

1.2 混沌优化粒子滤波
1.2.1 粒子群优化算法
粒子群优化算法源于对鸟群捕食行为的研究,基本思想是通过群体中个体之间的协作和信息共享来寻找最优解,有简单易实现,需调节参数少的优点,可应用于函数优化、神经网络训练、模糊系统控制等领域。
算法抽象粒子i在N维空间的位置表示为一个矢量Xi=(x1,x2,…xN),飞行速度矢量为Vi=(v1,v2,…vN)。每个粒子都有一个由目标函数决定的适应函数(fitness value),并且知道自己的飞行经验以及到目前为止自己的最好位置(pbest)的整个群体中所有粒子发现的最好位置(gbest)。粒子在寻优中按照式(1)、式(2)进行速度和位置的更新,其中c1、c2为学习因子通常取值为2,rand()随机函数值在(0,1)范围内。
vi=vi+c1×rand()×(pbesti-xi)+c2×
rand()×(gbesti-xi),
(1)
xi=vi+xi。
(2)
1.2.2 改进粒子群优化粒子滤波
文献[10]使用的是高斯粒子群优化算法(Gaussian Particle Swarm Optimization,PSO)提出了GPSOPF跟踪算法。对粒子群有虎算法中的粒子速度量使用高斯分布产生,相较于标准粒子群优化算法的速度更新方程如下;
vi=vi+c1×|gaus()|×(pbesti-xi)+c2×
|gaus()|×(gbesti-xi)。
(3)
式(3)是对式(1)进行了高斯函数干扰,gaus()为符合(0,1)的高斯分布。粒子的位置更新公式不变与式相同。
高斯粒子群优化算法尽管对粒子的更新速度添加了高斯变异,但与标准的例子群优化算法一样,在寻优时仍容易陷入局部最优解,错过全局最优解。文献[11]对粒子群优化算法进行了混沌优化,对粒子的位置进行了混沌优化操作。式(4)可以看作一个动力学系统,其中u为控制参量,u确定后由任意初始值z0∈(0,1)可迭代出一个确定的任意序列。对粒子的位置进行公式所示的寻优。
zn+1=uzn(1-zn)n=0,1,2,...。
(4)
2 结合SVM检测的粒子滤波跟踪
2.1 支持向量机
支持向量机是定义在特征空间上间隔最大化的二分类模型[12-13]。其主要算法思想是求解能够正确划分训练数据集并且几何间隔最大的分离超平面。SVM在机器学习任务中经常被用来做分类和识别,通过提取训练样本得到特征向量,使用特征向量来表示样本。对于给定的个样本,xi∈Rd和类标签ti∈{-1,1},∀i∈{1,N},SVM找到满足式(5)和式(6)的超平面。其中w、b分别表示超平面的法线和偏置,εi为松弛变量,C>0为惩罚系数,针对不同问题设置不同惩罚程度。
(5)
(6)
2.2 支持向量机训练
训练和测试样本库选择为INRIA行人库,其中正样本规格为64×128共2 416个,负样本尺寸由340×240到640×480不等共1 218个。选择梯度向量直方图(Histogram of Oriented Gradient,HOG)作为样本的描述特征,并进行主成分分析(Principal Component Analysis,PCA)降维以提高训练和检测的速度,根据文献[14]实验中将3 780维HOG特征降到50维,其中训练样本中正样本如图1所示。

图1 训练正样本
2.3 结合检测的粒子跟踪算法
将训练好的检测器结合到跟踪算法中,通过对比预测位置区域的置信度来决定是否需要进行目标检测,实验中设置的阈值(threshold)为0.4,小于阈值时进行目标检测,即是否进行目标检测步骤跟在目标预测之后,完整的优化跟踪检测算法流程如下:
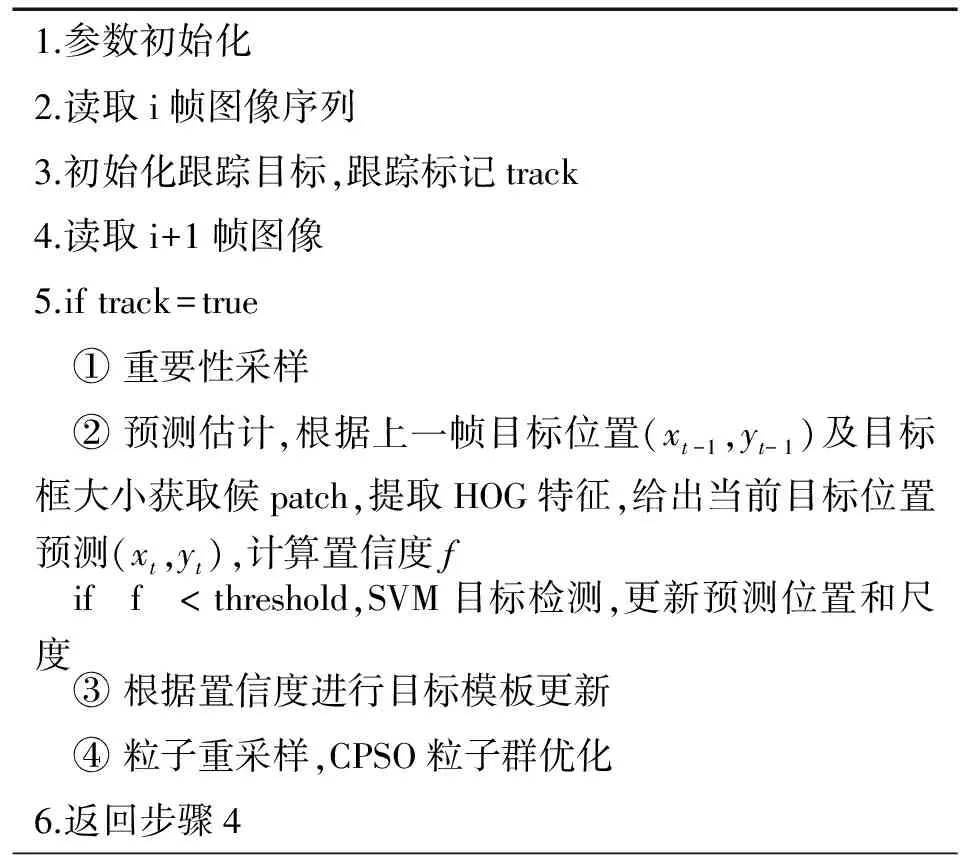
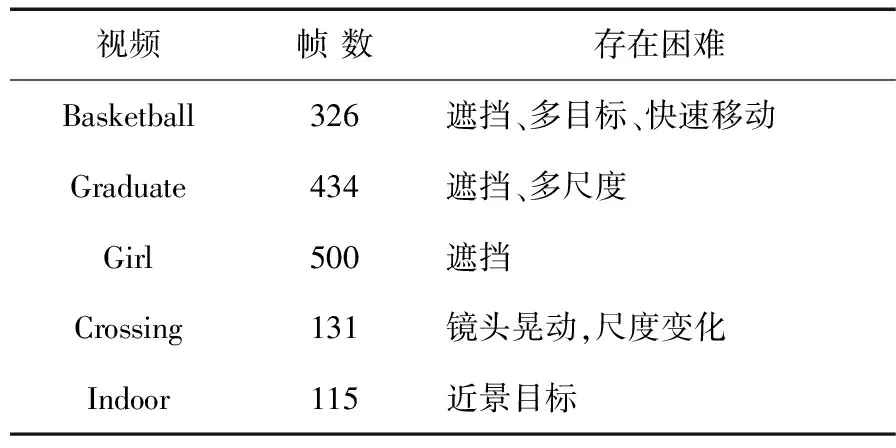
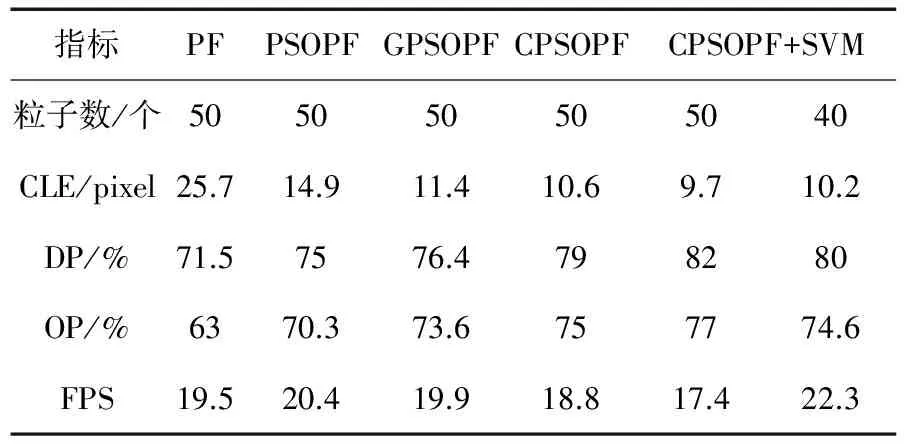
1.参数初始化2.读取i帧图像序列3.初始化跟踪目标,跟踪标记track4.读取i+1帧图像5.iftrack=true ①重要性采样 ②预测估计,根据上一帧目标位置(xt-1,yt-1)及目标框大小获取候patch,提取HOG特征,给出当前目标位置预测(xt,yt),计算置信度f if f 为验证算法的有效性,选择了VOT(Visual Object Tracking)测试序列中的含有行人目标的序列和室内监控视频序列进行跟踪测试。主要遇到的困难有目标速度快、多目标、近景目标、遮挡以及尺度环境光照变化等。 对算法的衡量指标采用文献[15]中提到的,中心位置误差(Center location error,CLE)、重叠精度(Overlap precision,OP)和距离精度(Distance precision,DP)是CLE小于阈值的帧数占总的视频序列帧数的百分比、帧率(Frames per Second,FPS)和粒子数Num,其中重叠精度阈值选择常用的0.5。 实验所基于的硬件为i5-4200CPU,主频2.5 GHz,8 G内存。Visual Studio2013环境C++编程以及Opencv2.4库。 选择的测试视频序列信息和在跟踪中存在的挑战如表1所示,表2为所有测试视频指标的平均值。 表1 测试序列信息 视频帧数存在困难Basketball326遮挡、多目标、快速移动Graduate434遮挡、多尺度Girl500遮挡Crossing131镜头晃动,尺度变化Indoor115近景目标 表2 实验记录 指标PFPSOPFGPSOPFCPSOPFCPSOPF+SVM粒子数/个505050505040CLE/pixel25.714.911.410.69.710.2DP/%71.57576.4798280OP/%6370.373.6757774.6FPS19.520.419.918.817.422.3 从表2测试结果可以看出混沌优化粒子滤波在使用的粒子数相同时,CLE、DP、OP项指标均好于标准粒子群优化滤波和高斯粒子群优化滤波;对于标准粒子滤波提升效果明显,CLE比标准粒子群优化提高约5像素,DP提高4%,OP提高5%,说明混沌粒子群优化算法相较于其他优化算法寻优效果更好。优于优化算法在一定程度上增加了整体计算时间,FPS指标要低于标准PF和其他粒子优化滤波。 表中可看出结合了SVM检测后除了FPS指标外,其他指标均优于未结合检测的混沌优化粒子滤波跟踪。实验中采用了PCA降维对检测时的特征进行降维处理以提高检测速度,HOG特征降维到50维后检测73×130大小图像约为40 ms。算法中对所需监测区域进行了缩放处理保证检测速度。 粒子群优化使得粒子相跟好的个体靠近,从而可以减少粒子滤波框架中所需的粒子数,而粒子数越多理论上跟踪就越精确,但这是以效率为代价。实验测试了减少粒子数(以50每次减少5个),粒子数减少到40时可达到实时效果且其他指标基本仍优于其他粒子优化滤波。图2为提出的算法在basketball和girl两个序列的跟踪效果,个序列存在目标遮挡的困难且basketball存在颜色相似和目标快速运动的困难,粗框为跟踪框,细框为标记框。 (a)basketball (b)girl图2 部分序列跟踪效果(粗框为跟踪框,细框为标记框) 对现有的粒子滤波方法进行分析,对于粒子滤波中的采样环节中常用的粒子群优化进行改进,使用混沌优化进行粒子位置全局优化,实验结果表明优化方法有效。将支持向量机融合到跟踪算法中进行再检测,实现了在跟踪目标被遮挡后还能够再次检测出目标并进行跟踪,提高了算法的鲁棒性。下一步工作可进一步优化算法降低复杂度提高效率和跟踪性能。 [1] Arulampalam M S,Maskell S,Gordon N,et al.A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking[J].IEEE Transactions on Signal Processing,2002,50(2):174-188. [2] 刘婕.复杂场景多特征融合粒子滤波目标跟踪[D].重庆:重庆理工大学,2015. [3] 李东年,周以齐.采用改进粒子群优化粒子滤波的三维人手跟踪[J].光学精密工程,2014(10):2870-2878. [4] 孟军英.基于粒子滤波框架目标跟踪优化算法的研究[D].秦皇岛:燕山大学,2014. [5] 陈志敏,薄煜明,吴盘龙.基于自适应粒子群优化的新型粒子滤波在目标跟踪中的应用[J].控制与决策,2013(2):193-200. [6] 明新勇.基于均值漂移和粒子滤波的目标跟踪算法研究[D].南京:南京理工大学,2008. [7] 曹洁,李伟.一种改进的粒子滤波算法及其性能分析[J].计算机工程与应用,2012,48(8):144-147. [8] 吴桐,王玲,李钟敏,等.基于混合观测模型的粒子滤波跟踪算法[J].计算机工程与应用,2016,52(6):172-177. [9] 杨向波,朱虹,邓颖娜,等.基于粒子滤波的人脸跟踪算法[J].计算机工程与应用,2008,44(23):209-211. [10] 方正,佟国峰,徐心和.粒子群优化粒子滤波方法[J].控制与决策,2007(3):273-277. [11] 高鹰,谢胜利.混沌粒子群优化算法[J].计算机科学,2004(8):13-15. [12] Smola A J,Schölkopf B.A Tutorial on Support Vector Regression[J].Statistics and Computing,2004,14(3):199-222. [13] Chen P H,Lin C J,Schölkopf B.A Tutorial on ν-Support Vector Machines[J].Applied Stochastic Models in Business and Industry,2005,21(2):111-136. [14] 陈锐,王敏,陈肖.基于PCA降维的HOG与LBP融合的行人检测[J].信息技术,2015(2):101-105. [15] Wu Y, Lim J,Yang M H.Object Tracking Benchmark[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(9):1834-1848. 徐胜(1991—),男,硕士研究生,主要研究方向:目标检测与跟踪、机器学习等; 黄晁(1971—),男,博士,研究员,主要研究方向:网络传感、智能感知技术等; 孙松(1992—),男,硕士研究生,主要研究方向:目标检测与跟踪、机器学习、信息隐藏等。3 实验与分析
3.1 实验分析指标和环境
3.2 实验结果及分析


4 结束语

猜你喜欢
房地产导刊(2022年5期)2022-06-01
昆明医科大学学报(2022年1期)2022-02-28
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年7期)2021-07-16
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
浙江工业大学学报(2017年5期)2018-01-22
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05