背靠背柔直的VSG控制策略及应用研究
2018-12-22 07:32:38王坤宇
分布式能源 2018年5期
王 奥, 常 征,艾 欣, 邹 丹, 王坤宇
(1.国网经济技术研究院有限公司,北京 昌平 102209;2.国网北京市电力公司,北京 东城 100002;3.新能源电力系统国家重点实验室(华北电力大学),北京 昌平 102206)
0 引言
随着电力电子器件的快速发展,具有可关断能力的电力电子器件使得高压直流输电技术发生了重大变革[1-3]。柔性直流输电(voltage source converter based high voltage direct current transmission, VSC-HVDC)采用具有自关断能力的高频绝缘栅双极晶体管(insulated gate bipolar transistor, IGBT)或门极可关断晶闸管(gate turn-off thyristor, GTO)以及脉宽调制(pulse width modulation, PWM)技术组成的电压源型换流器(voltage source converter, VSC)进行换流。这种新型直流输电解决了常规直流输电中遇到的问题,如:无需电网短路电流的支撑换相,可以向无源的交流系统供电;换流站无需无功补偿;有功无功解耦控制;交流侧和直流侧的滤波影响小;两个换流站可独立控制和运行,不需要站间通信等[4]。
利用清洁能源发电的分布式电源通常远离主网、发电量小而且供电质量也不高。例如太阳能电站、风电场(含海上风电场)、中小型水电厂、潮汐电站等,利用柔性直流输电将分布式电源与主网互联,能够解决分布式电源并网存在的种种问题,例如频率波动、电压闪变、潮流波动等,大大提高了交流系统运行的稳定性和电能质量,保证了系统供电可靠性。
随着柔性直流输电技术的发展,大量电力电子器件的引入使得换流站响应速度快、几乎没有转动惯量,而且大量的分布式电源接入及传统同步发电机装机比例减少,导致电网将逐渐存在低惯性、欠阻尼的问题,电网的稳定性受到影响。将虚拟同步发电机(virtual synchronous generator, VSG)控制技术应用到柔性直流的控制策略中成为目前的研究焦点,VSG控制技术的主要思想是基于同步发电机的机电暂态模型,模拟同步发电机的转子惯量和系统调频调压特性,在电网发生暂态故障或扰动时提供惯性,提高电网稳定性。VSG控制技术作为新兴技术,主要应用在微电网中,在背靠背柔性直流中应用较少[5-11]。
北京220 kV电网以“闭环设计、开环运行”为主。随着坚强智能电网的推进,开环运行逐渐展现出其缺陷:1)开环运行供电可靠性较低,即在开环运行的电网中,电网发生故障时的故障隔离操作和切除故障恢复供电的倒闸操作都会造成短时停电;2)开环运行无法满足分布式电源大规模友好接入。因此,为提高供电可靠性和使分布式电源友好接入,现阶段正不断推动电网合环运行[12]。目前,常见的合环方式分为单电源合环和多电源合环,但二者都有各自缺陷:单电源合环对上级电网故障无法保证可靠性供电;多电源合环在合环瞬间会出现较大的冲击电流和合环电流,分布式电源接入时系统潮流波动明显。在这种情况下,利用背靠背柔性直流装置,将交流系统进行解耦互联,具有强大的潮流控制能力,在系统正常运行时可以均衡各区负载,大大提高了系统运行的可靠性。当个别区域出现故障时,柔性直流装置可提供有功和无功支援,解决故障区域供电能力不足的问题;此外,由于没有直流线路环节,降低了成本,适用于实际电网[13]。本文构建含背靠背柔性直流220 kV环网模型,提出VSG控制策略,利用PSCAD/EMTDC进行仿真实验,研究背靠背柔性直流VSG控制及其在合环运行中的应用。
1 背靠背柔性直流输电系统
背靠背柔性直流输电系统将柔性直流装置的整流站和逆变站合并在一个换流站内,在此换流站中完成交直流的相互转换过程。由于整流站和逆变站合并在一个换流站内,直流回路阻抗很小,使得整个换流站的损耗很小,而且直流侧发生故障的概率也很低,保护装置得到了简化;此外,背靠背换流站不存在通信延时,控制系统响应速度很快。近年来,电网规模随着负荷的提升而不断扩大,利用背靠背柔性直流装置构成的环网形式的交直流混合电网可以均衡负载,实现相同频率或不同频率交流系统间的互联,对传输的功率也具有良好的可控性,在传输有功功率的同时也可提供动态的无功功率和电压支撑,提高了系统可靠性。图1就是利用背靠背柔性直流装置将电网连接起来构成环网的示意图,S1、S2、S3为交流有源网络,Tm1和Tm2为送端和受端换流变压器,VSC1和VSC2为换流站。
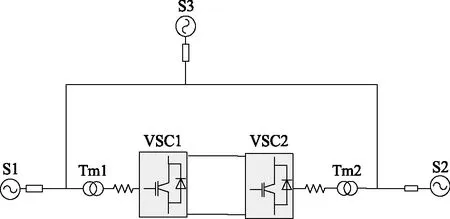
图1 环网结构Fig.1 Ring network structure
2 柔性直流的控制策略
基于IGBT的电压源型换流器采用PWM控制方式,根据系统的运行要求,产生合适的PWM触发脉冲对换流器阀进行控制。调制比M与移相角δ为两个控制变量,其中M为交流侧相电压与直流电压之比,δ为交流侧系统电压相量超前VSC交流侧基波电压相量的角度。当对VSC进行控制时,无论系统处于工作状态还是故障状态,调节正弦脉宽调制(sinus PWM,SPWM)中调制比M和移相角δ,即可实现对有功和无功的控制。目前,常见的柔性直流输电系统的控制策略是基于电流内环控制的双环电流控制策略,它既能实现有功无功的解耦控制,又能实现对过电流的限制功能。
图2所示的整个柔性直流控制系统可分为系统级控制、换流站级控制和换流器阀级控制。
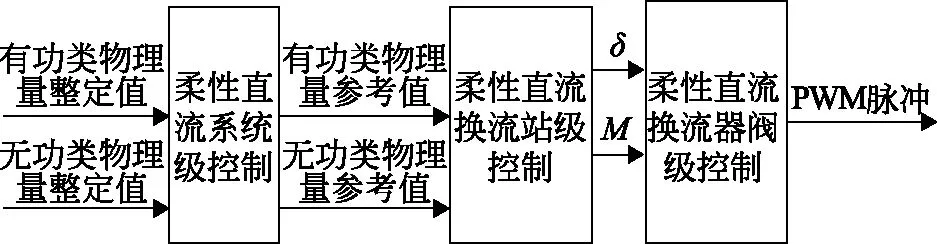
图2 柔性直流分层控制原理Fig.2 Principle of VSC-HVDC stratified control
系统级控制的作用是保持系统稳定并优化直流系统整体性能,为换流站级控制提供参考值指令。
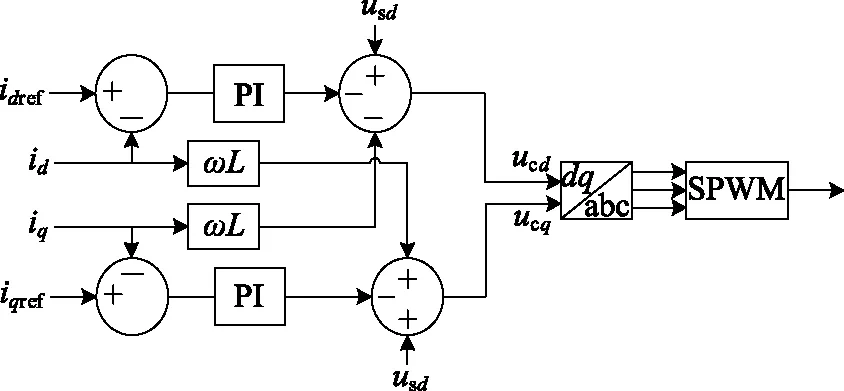
图3 基于d /q轴解耦的控制器内环电流控制图Fig.3 Inner loop current control of controller based on d /q axis decoupling
换流站级控制接收参考值指令,协调本端换流站的输出参考值,根据得到SPWM信号的调制比M与移相角δ,完成输出参考值到换流器阀的触发脉冲转换。换流站级控制的基础是电流控制。目前工程上常用的是基于电流内环控制的双环电流控制策略。在VSC稳态数学模型的基础上,内环采用图3所示基于Park变换的d/q轴解耦控制策略[14],外环控制器将协调控制指令(如功率、电压等)转化为交流电流在d/q轴上的参考值idref和iqref,内环通过控制电流,将d/q轴交流电流指令转换为d/q轴交流电压指令送入触发脉冲发生环节(SPWM)。这种控制策略通过控制交流电流的两个分量id和iq实现了有功、无功的解耦控制,线性度高,动态响应速度快。
换流器阀级控制根据得到的SPWM的调制比M与移相角δ,生成触发脉冲,实现对换流器阀的控制。
2.1 传统的外环控制器结构
柔性直流输电系统的内环电流控制是基于Park变换的d/q轴解耦控制策略;传统的外环控制器的控制策略分为两种:
1) 采用主从式控制策略,柔性直流系统中必有一个换流站采用定直流电压控制策略,其余换流站可采用定有功功率控制。基于主从式控制策略的柔性直流系统控制性能好,直流电压偏差小;但如果采用直流电压控制的换流站失去对直流电压的控制,柔性直流系统的潮流会失去平衡。因此,采用主从式控制策略的柔性直流系统的适应性较差,制约了长距离柔性直流系统的发展。
2) 采用多点控制策略,其不再要求有一个换流站采用定电压控制,系统适应性高。基于多点控制策略的典型控制方式为下垂控制。目前常见的下垂控制有有功-频率下垂控制、无功-电压下垂控制、直流电压下垂控制。有功-频率和无功-电压下垂控制主要是将传统同步发电机的有功-频率、无功-电压下垂特性引入到控制器中,实现对有功无功的无互联线控制。直流电压下垂控制指换流站直流电压随输出功率(或电流)的不同而线性变化,采用下降输出特性,下降的功率-电压(电流-电压)特性使得系统功率在各换流站之间稳定分配[14-15]。
本文在分析传统控制时,采用直流电压下垂控制。外环控制器如图4所示,偏差输出er为
er=kp(Pdref-Pd)+ku(Udref-Ud)
(1)
式中:kp和ku为下垂控制的比例系数;Pdref和Udref分别为外环控制器的直流功率和直流电压的设定值。
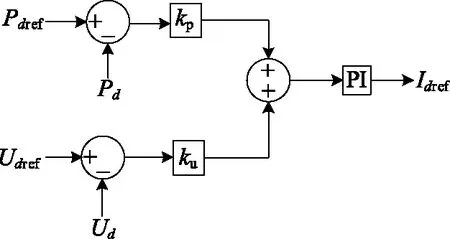
图4 下垂控制的外环控制器Fig.4 Outer loop controller of droop control
2.2 基于VSG控制的外环控制器结构
2.2.1 VSG拓扑结构与原理
基于VSG控制的逆变侧与同步发电机模型的等效关系如图5所示。图中:E={ea,eb,ec}为虚拟同步发电机感应电势;U为机端电压;i为输出电流;R和L为虚拟的定子电枢电阻与同步电感;P、Q的参考方向为从电网流向逆变侧。VSG模型从拓扑上模拟同步发电机的电磁关系与机械运动,其控制算法从外特性上模拟有功-频率、无功-电压调节特性。
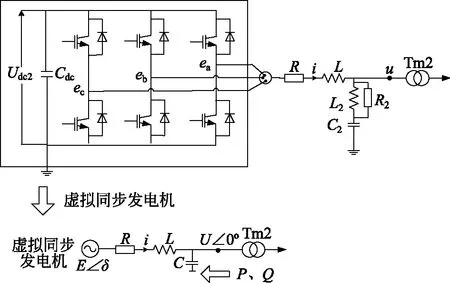
图5 VSG拓扑结构Fig.5 VSG topology structure
2.2.2 虚拟同步发电机的机械运动方程与电磁方程
1) VSG的机械方程同同步发电机的转子运动方程为
(2)
式中:Tm、Te和Td分别为机械转矩、电磁转矩和阻尼转矩,N·m;D为阻尼系数,N·m·s/rad;J为转子转动惯量,kg·m2。在极对数为1的情况下,机械角速度ω即为实际电角速度,ω0为额定电角速度(rad/s),θ1为电角度(rad)。
Te=Pe/ω=(eaia+ebib+ecic)/ω
(3)
式中Pe为输出的电磁功率。
VSG技术由于引入了转动惯量,使得背靠背柔性直流系统在功率、电压、频率等的动态过程中具有了惯性;由于引入了阻尼系数,使得背靠背柔性直流系统具有了阻尼功率振荡的能力。
2) VSG的电磁方程同定子的电气方程为
(4)
2.2.3 VSG的控制策略
VSG的控制策略如图6所示。外环中,VSG的有功调节相当于同步发电机的调速器,模拟其有功-频率下垂特性,通过对虚拟同步发电机虚拟机械转矩Tm的调节来实现并网逆变器有功指令的调节;VSG的无功调节相当于同步发电机的励磁调节功能,模拟其无功-电压的下垂特性,通过对虚拟发电机虚拟电势E的调节来调节无功和电压。内环控制器采用基于Park变换的d/q轴解耦控制策略,交流电流在d/q轴上的实际值与外环利用VSG技术得到的参考指令值共同生成交流电压参考指令值,通过触发脉冲进而实现对换流器阀的控制。
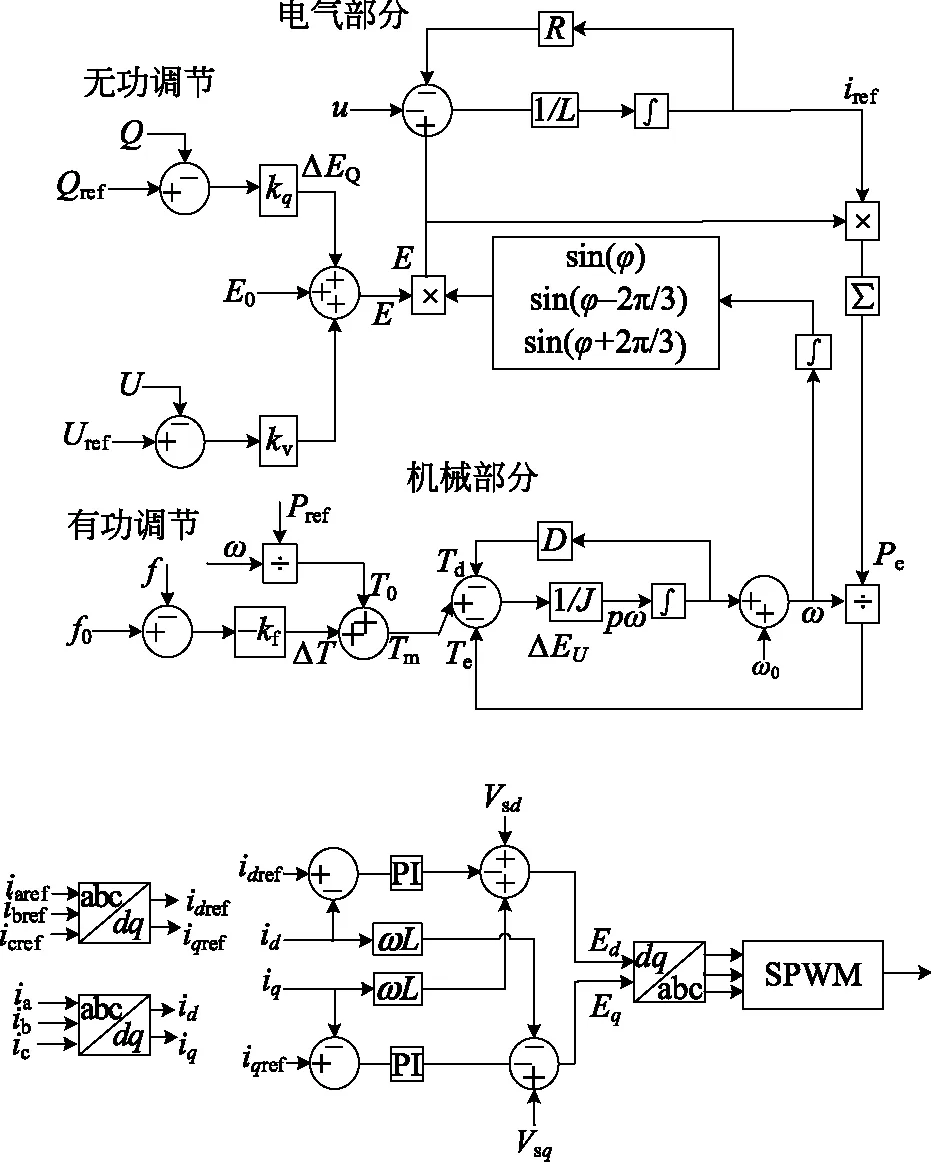
图6 VSG控制框图Fig.6 VSG control block diagram
2.2.4J、D的确定
根据图5建立虚拟同步机的小信号模型,从而确定J、D的值。设阻抗Z=R+jωL,逆变侧输出的视在功率为[16-20]
解得逆变侧输出的有功和无功功率分别为
(8)

考虑到220 kV输电线ωL≫R,则α≈90°,经化简,逆变侧向交流电网传输的三相有功功率和无功功率为
(9)
将式(2)、(7)、(9)中的变量表示成稳态量和小扰动量之和,即有
仿真时,将额定工频50 Hz及采样值输入三角函数神经网络进行训练,即可快速获得基波和各次谐波的谐波频率、幅值及其相位,目标误差eobj设为0.001。
(10)
式中:右式第1项为稳态量;第2项为小扰动量。稳态时逆变站交流侧电压与逆变站出口处(网侧)电压相位差不大,sinδ0≈δ0,小信号表达式为
(11)
经过拉普拉斯变换后,有功功率环控制框图如图7所示。

图7 有功功率环控制框图Fig.7 Active power loop control diagram
根据图7可计算出有功功率部分的传递函数为
(12)
自然振荡频率和阻尼比为
(13)
采用VSG技术,J、D参数可任意调节不受约束,但考虑到响应速度和控制,将其设计为欠阻尼系统(ζ<1)。
(14)
3 系统暂态运行分析
对图8所示环网背靠背柔性直流系统采用两种不同的控制方式:1)直流电压下垂控制,对整流侧和逆变侧均采用直流电压下垂控制策略;2)VSG控制,整流侧采用定直流电压定无功功率控制策略,逆变侧采用VSG控制策略。有功、无功功率的参考方向以流向换流站为正,直流电流、直流功率的方向以从整流侧流向逆变侧为正。利用PSCAD/EMTDC仿真软件,当系统出现瞬时故障及短时间扰动时,分析比较不同控制方式下系统的故障响应及恢复情况。
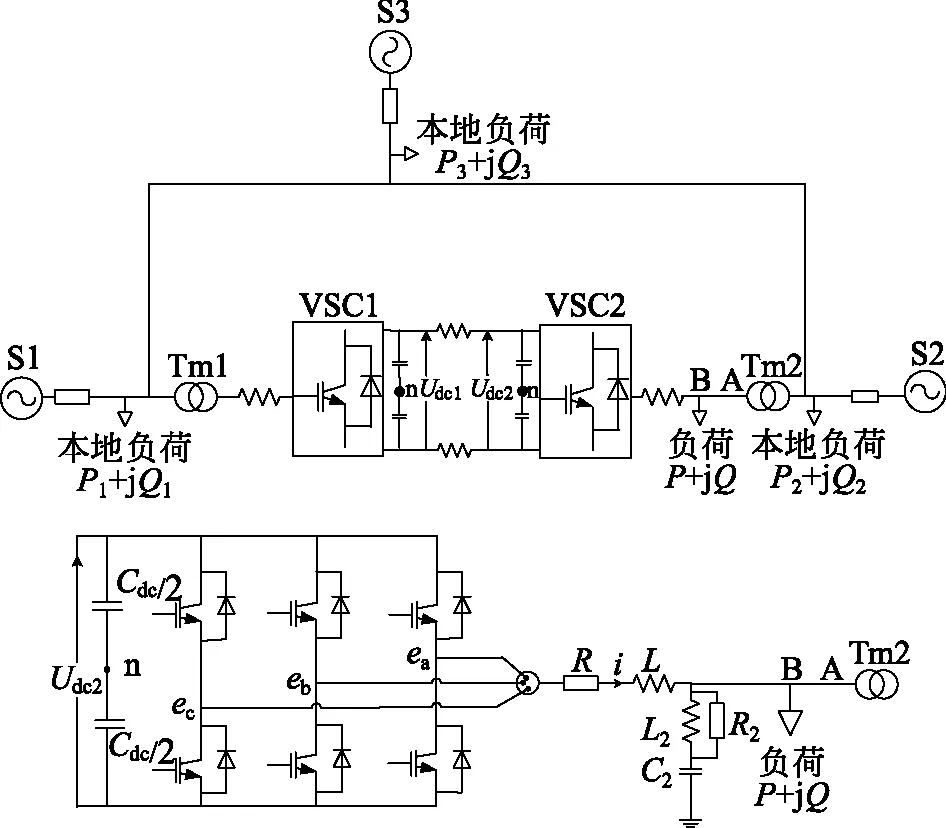
图8 仿真示意图Fig.8 Schematic diagram of simulation
直流电压下垂控制参数如表1所示,直流功率参考值为270 MW,直流电压参考值为330 kV,无功功率参考值为200 Mvar。VSG控制参数如表2所示,机端电压指令为162 kV,无功指令为210 Mvar,有功指令为270 MW,频率指令为50 Hz。基于图5所示逆变器拓展结构的系统参数如表3所示。根据式(14),取截止频率ωc为2倍工频的1/10,自然振荡频率ωn应满足ωc<ωn,取为150 rad/s。计算得VSG的J、D分别为:J=420 kg·m2,D=100.8 N·m·s/rad。

表1 下垂控制参数Table 1 Droop control parameters

表2 VSG控制参数Table 2 VSG control parameters
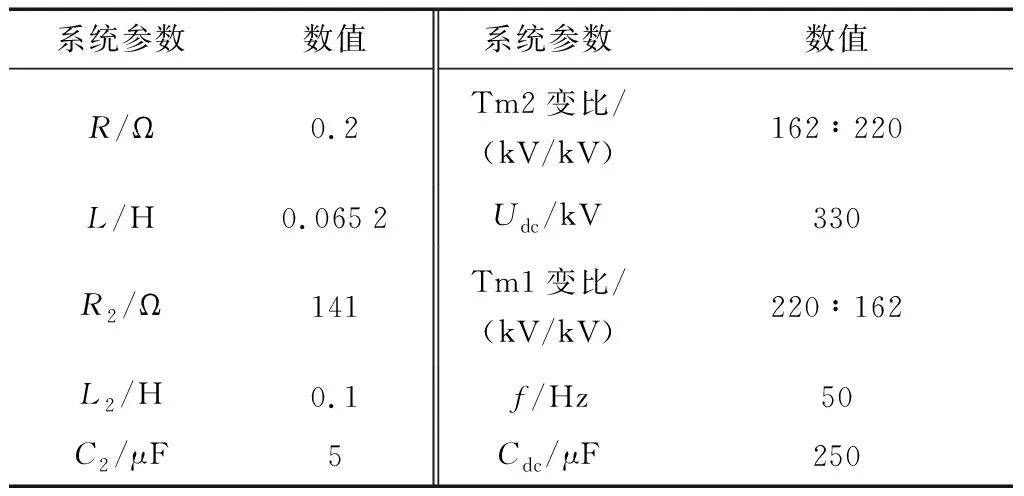
表3 系统参数Table 3 System parameters
3.1 逆变侧A处发生三相短路接地故障的情况
如图8所示,直流系统采用伪双极方式,直流电压等级为330 kV,交流电压等级为220 kV。当系统运行2 s时,A处发生三相接地短路故障,为便于观察,设置为2 s后故障恢复。两种不同控制模式下系统直流电流、直流电压、逆变器出口处有功功率的变化情况如图9所示。
系统A处2 s出现三相短路,经历2 s故障恢复时,下垂模式下的直流电压在故障初期先上升后下降,故障中维持较高的直流电压水平,故障结束后迅速下降最终回到设定值;直流电流振荡过零点,故障结束后立刻增加后恢复参考值;逆变器出口处的有功功率迅速减少过零点,故障结束后大幅增加振荡恢复参考值。
VSG控制模式下直流电压于故障初期出现小幅上升并振荡衰减,故障中的直流电压水平较故障前相差不大,故障结束后振荡衰减达到稳定值;直流电流下降轻微过零点并逐渐衰减,故障结束后振荡衰减达到稳定值;逆变器出口处的有功功率在故障初期降至零点,故障恢复后缓慢地恢复至稳定值。在发生三相短路故障时,直流电压下垂控制和VSG控制系统的频率无较大差别。总体上,当发生三相短路时,VSG由于J、D的存在,在动态过程中具有了惯性和阻尼电网功率振荡的能力,故障切除后恢复至稳定状态要较直流电压下垂控制稍久。
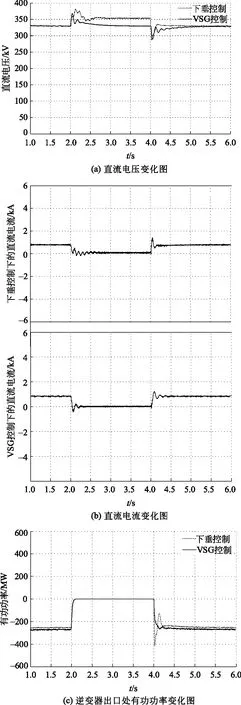
图9 三相短路波形图Fig.9 Diagram of three-phase short circuit
3.2 负荷变动
设图8中逆变器出口B处的负荷2 s时退出700 MW,3 s时负荷重新接入系统。仿真图形如图10所示。2 s负荷突减700 MW时,对于VSG控制,在负荷退出时,由于存在虚拟转速,逆变侧参与了电网的一次调频,并网的有功功率减少约50 MW,负荷切入后恢复到原值;而采用直流电压下垂控制有功功率无变化。

图10 负荷波动示意图Fig.10 Schematic diagram of load fluctuation
4 结论
本文为了抑制电网的合环电流和提高供电可靠性,搭建了环网背靠背柔性直流系统,采用两种不同控制方式(直流电压下垂控制、VSG控制),研究当系统出现瞬时故障及短时间扰动时,不同控制方式下系统的故障响应及恢复情况,并得到以下结论:
1) 当发生三相短路时,VSG由于J、D的存在,在动态过程中具有了惯性和阻尼电网功率振荡的能力,故障切除后恢复至稳定状态要较直流电压下垂控制稍久。
2) 当发生负荷波动时,对于VSG控制,在负荷退出时,由于存在虚拟转速,逆变侧会参与电网的一次调频,负荷切入后恢复到原值;而采用直流电压下垂控制有功功率无变化。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
能源工程(2020年6期)2021-01-26 00:55:22
文化创新比较研究(2020年7期)2021-01-13 09:10:48
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2018年3期)2018-06-26 08:06:20
湖北电力(2016年8期)2016-05-09 09:03:08
湖北电力(2016年8期)2016-05-09 09:03:06
通信电源技术(2016年1期)2016-04-16 04:57:26