穿黄工程盾构掘进轴线控制实践与思考
2018-12-21 13:31
中国水能及电气化 2018年12期
(水利部小浪底水利枢纽管理中心,河南 郑州 450099)
1 概 述
南水北调中线干线工程穿黄隧洞采用倒虹吸方式从黄河河床下部穿过,将南水北调引水从黄河南岸输送至北岸。穿黄隧洞共布设两条平行隧洞,两条隧洞轴线间距28m,单条隧洞全长4250m,盾构开挖洞径9m,由过河隧洞和邙山隧洞两段组成,其中从黄河北岸始发竖井到南岸检修竖井之间段为过河隧洞,长度3450m,南岸隧洞进口至南岸检修竖井之间段为邙山隧洞,长度800m。过河隧洞在黄河河床下的最大埋深35m,最小埋深23m[1]。图1为穿黄隧洞结构布置示意图[2-3]。

图1 穿黄隧洞结构布置示意图
隧洞开挖采用泥水平衡盾构机掘进施工,由北岸竖井始发,穿越黄河完成过河隧洞掘进,到达南岸检修竖井,对盾构机进行检修后,完成邙山隧洞掘进,到达南岸隧洞进口。
穿黄隧洞盾构掘进轴线通过地面控制点测量、地面到洞内传导测量、洞内导线测量、盾构机导向点测量,以及盾构机导向系统控制等一系列测量控制措施,并辅以高程、断面、沉降等测量手段,完成对施工过程的轴线控制。通过采用先进的轴线控制技术和严密的测量控制措施,穿黄隧洞盾构掘进施工实现了高精度顺利贯通。
2 轴线控制技术难点
根据泥水平衡盾构施工原理,正常掘进时盾构机刀盘切削开挖面及已安装管片的壁后需要在一定的泥水压力作用下处于平衡状态,保证隧洞的稳定。盾构机到达南岸竖井时,必须在南岸竖井接收端采取特殊措施,即在接收面预先安装钢环并在钢环上加装橡胶充气气囊,盾构机进入竖井时位于气囊中间,通过对气囊充气,使盾构机与气囊紧密接触,起到闭水闭气作用,保证开挖面稳定[4-5]。
为了保证实现闭水闭气效果,盾构掘进与南岸竖井贯通时,盾构机必须位于预先安装的接收钢环中心。设计要求贯通时盾构机刀盘中心与接收环中心的绝对贯通误差控制在50mm内。如果绝对贯通误差大于50mm,将无法充分保证气囊闭水闭气效果,会给施工安全造成不利影响;当绝对贯通误差超出100mm时,盾构机将无法正常进入南岸竖井,因此,过河隧洞的贯通误差是轴线控制的关键,必须按照贯通误差要求反推隧洞平面控制和高程控制测量的精度指标并加强过程控制,确保贯通精度满足要求,否则,会因水土流失造成灾难性后果。
因为北岸始发竖井内径只有16.4m,竖井传导测量时钢丝间距最大只能放宽到12.4m,利用这样的短边控制盾构机经过3450m的过河隧洞掘进到达南岸竖井时贯通误差小于50mm,且在隧洞中部无法设置检查孔检查洞内控制成果的精度,因此施工掘进过程控制测量精度非常重要,也是控制的难点。
根据轴线控制技术难点和贯通误差估算,以及设计允许的贯通误差要求,按照规范对贯通误差地面、洞内的分配指标,反求测量作业各个环节的测量等级和精度,要求地面控制点误差控制在6mm以内,采用狭长三角形法进行竖井定向测量的测角误差按照1.8″的精度控制,并采用三组或三组以上观测,按规范严格控制洞内控制导线测量的角度测量误差,确保所有误差叠加后横向贯通误差小于50mm的极限贯通误差要求。据此制定详细的测量实施方案,明确地面控制点加密测量、竖井传导测量、洞内控制导线和施工导线测量、盾构机续航导向仪器点定位测量、水准测量、断面测量、隧洞轴线位置测量、椭圆度测量、洞内沉降观测、地面沉降观测等各施工环节的点位设置、测量方法、达到的精度等级、检查方法、复核测量周期、关键位置关键工序控制要点、质量保证措施等,并配备相应的测量仪器和人力,经监理审批后严格实施,严格控制盾构掘进的轴线位置满足设计要求,确保隧洞按设计要求贯通。
3 盾构掘进轴线控制技术措施
3.1 地面测量控制措施
地面控制测量采用全球定位系统GPS测量[6]。分别在北岸竖井、南岸竖井附近各均匀布设3个带有强制对中装置的观测墩,在通视条件允许情况下,尽可能形成远边以减小地面控制点点位误差对隧洞贯通的影响;分别与南岸、北岸其他建筑物控制点有1~2个重合点,便于成果校核,方便与隧洞进出口建筑物顺利衔接;控制网中包括3个以上发包人提供的基准点,以方便平差计算时有必要的多余条件,约束控制网,正确评定控制网点位精度。
采用《全球定位系统(GPS)测量规范》中C级网静态测量模式和双频制GPS接收机。观测时严格执行规范规定的卫星高度角、同时有效卫星数、有效卫星观测总数、观测时段、时段长度、采样间隔、时段中任一卫星有效观测时间等技术参数。并尽可能增加时段长度,以获取更可靠的观测数据。
采用仪器随机软件进行数据后处理,对基线精度、同步环闭合差、异步环闭合差、冗余误差、点位中误差等进行重点检查,对控制网精度进行评判,确定成果是否可用。
3.2 地面到洞内传导测量措施
从地面到洞内的传导测量采用狭长三角形法[7]将地面控制点引至井下,然后根据测得的地下已知点坐标和方位,进行洞内控制导向测量,并用控制导线成果传导施工导线或直接定位盾构机三维位置。
3.2.1 坐标方位传递
竖井传导测量坐标方位传递示意图见图2。
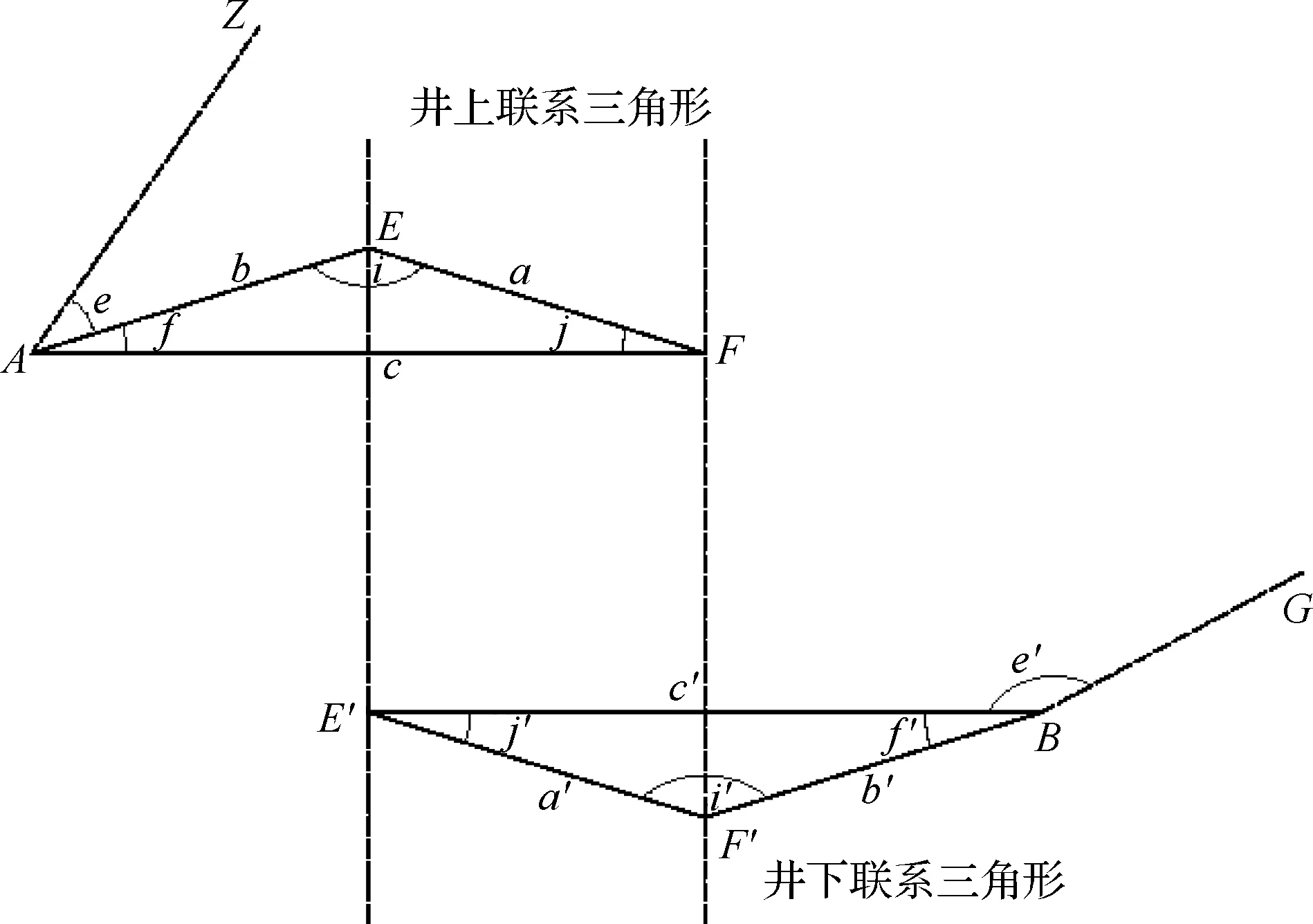
图2 竖井传导测量坐标方位传递示意
如图2所示,Z为地面控制点后视方位点,A为地面近井控制点(Z、A均为地面GPS网中强制对中点),E、F为钢丝垂线,B为地下任意设站点,G为洞内待测固定点,该点将作为洞内控制导线的起始点。测量时用两台1″级仪器同时设站在A点和B点按规范二等精度进行角度观测,并分别量取a、b、c、a′、b′、c′的距离,用距离对三角形进行平差后求算角度j和j′,最后利用A点观测角、j、j′、B站观测角推算BG边方位,进而解算G点坐标,同时从G点向前延伸一点作为洞内控制导线的起始方位。坐标、方位传递顺序是(Z)→A→F→E(E′)→B→G→(洞内延伸点)。
3.2.2 具体测量技术措施
为了减小竖井传导测量对贯通面横向贯通误差的影响,布设狭长三角形和观测时采取的技术措施包括:近井点必须是有强制对中装置的GPS网点,后视边尽量长,b/a和b′/a′的比值要求在1.0~1.5范围之内,洞内必须设置两对控制点作为洞内控制导线的起算点,两根钢丝的连线与洞轴线平行且接近洞轴线,充分利用竖井有效空间使钢丝间距离最大化,重锤重量应每米(深度)不小于1kg,钢丝应采用不超过0.50mm的高强度钢丝,观测仪器必须是有效检定期内1″或0.5″级的全站仪,观测角f和f′控制在0.5°以内。每次传导测量观测三组(组间调整钢丝位置),分别计算BG边方位角,当差值较大时,应对本次测量成果进行检查,必要时重新进行测量,直至差值较小且满足允许误差要求时,取其均值作为本次测量的方位角传递值,以保证测量成果的准确性。若不是首次传导测量,应与以往竖井传导测量成果进行比较,检验本次测量成果的正确性。
竖井传导测量必须井上、井下同步观测。观测时应选择较好的天气条件,保证通视良好;去除施工干扰,比如停止周边大型机械运行、腾出竖井空间等,给传导测量创造良好环境。
3.2.3 平差计算
传导测量的平差计算主要是三角形平差计算。
根据a、b、c、f按正弦定理求角度j:sinj=bsinf/a,计算三角形长边c的长度值c算=bcosf+acosj,c边的不符值h=c算-c,a边改正值Δa=-h/4,b边改正值Δb=-h/4,c边改正值Δc=h/2。
以改正后的边长a、b、c为平差值,按正弦定理计算出f、i、j,即为平差后的角值。f改正很小,仍采用原测角值。
采用上述方法可计算出井下三角形平差后的边角a′、b′、c′、f′、i′、j′。f′改正很小,仍采用原测角值。
推算井下方位和坐标时要利用小角j、j′计算,钢丝间距离a和a′取中数,路径为从A点起,经c、a(a′)、c′三条边到B点,求出B点坐标和BG边方位角。三组数据取平均值计算G点坐标。
实际操作中,上游线隧洞竖井传导测量采用吊挂2根钢丝,观测3组;下游线隧洞竖井采用吊挂3根钢丝,即在靠近井点并排吊挂2根钢丝,钢丝相距40cm左右,以井底能够放置两个阻尼油桶为宜,观测2组,计算4组,这样可以在不降低精度的前提下减少外业工作量。
3.3 隧洞内控制导线测量措施
隧洞内控制导线是影响贯通面横向贯通精度的重要环节,为保证控制精度,对隧洞内导线布点、观测采取的技术措施包括:点位设置保证导线边长最大化,导线长短边过渡比值应小于3,测点牢靠地固定在管片上且有强制对中装置,最靠近掘进面的点必须距盾尾80环以上,当盾构掘进距离到达控制导线边长时应及时跟进,导线观测等级按规范二等精度执行,测站点与照准点必须分布在轴线两侧防止旁遮光影响,洞内控制导线必须形成附和导线并进行严密平差。
为了保证盾构机行进轨迹的正确性,需要经常对洞内导线、控制点进行延续测量或复测,正常掘进施工时,每掘进500m左右进行一次复测;若盾构机长期停滞,恢复掘进前必须进行一次复测。整个过河隧洞盾构掘进期间,上游线隧洞共进行8次复测,下游线隧洞共进行7次复测。
3.4 隧洞内施工导线延伸
隧洞内控制导线分两级,即控制导线和施工导线。施工导线主要用来进行隧洞施工的细部测量,包括盾构机导向点、方向点的测放,以及断面测量定位、桩号测定等辅助测量。
施工导线测点结构与控制导线点相同,固定在管片上,有强制对中装置。从洞内控制导线点起始,按三等精度施测支导线方法实施,长度一般小于500m。当盾构机距离控制导线最后一个点较远时,施工导线及时跟进,以满足控制要求。
3.5 导向点联测及导向系统轴线控制
隧洞盾构掘进过程通过盾构机自带的导向系统完成盾构机姿态和行进方向控制。穿黄隧洞盾构机采用SLS-T导向系统,该系统硬件由徕卡TCA1202激光全站仪一台、黄盒子(远程数据传输,给全站仪、激光接收靶供电)一个、激光接收靶(固定在盾构机上)、中央控制系统、工业电脑等组成。
3.5.1 导向系统轴线控制技术
以隧洞内控制导线点、施工导线点作为起始点,按极坐标法测定导向点坐标。导向点上安置激光全站仪,在全站仪上输入导向点和后视点的实际测量坐标,精确照准后视点,完成全站仪测站设置后将全站仪激光束照准激光接收靶中心位置,在工业电脑平台输入隧洞轴线的设计参数,完成导向系统的人工作业,剩余的工作由中央控制系统完成。全站仪端经过黄盒子将测量数据通过无线或电缆传输到中央控制系统,接收靶也将接收到的入射角及激光束在靶内的位置、折射角等其他参数传输到中央控制系统,中央控制系统根据接收到的数据自动计算盾构机的实际位置,包括盾构机刀盘位置桩号、盾头偏离水平向和竖向轴线距离、盾尾偏离水平向和竖向轴线的距离、盾构机行进趋向、盾构机自身滚动角等,并在工业电脑显示屏上直观显示,同时自动调整盾构机推力油缸的推力和行程,使盾构机趋向隧洞设计轴线位置[8]。接收机屏幕显示分三级,其中的一级屏幕显示见图3。
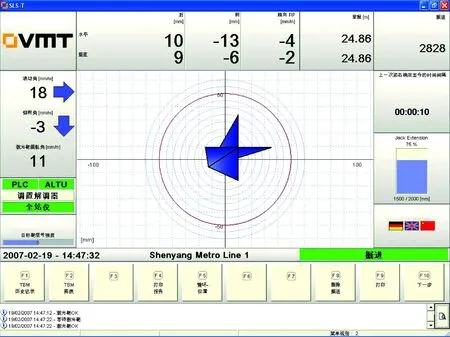
图3 接收机一级屏幕显示
掘进过程中,盾构机的运动轨迹存储在计算机内,可以随时调取和打印。
3.5.2 导向点设置及联测
根据固定在盾构机上并与盾构机各参数形成固定关系的激光接收靶对激光束的参数要求,即最大水平偏差146mm,最大垂直偏差88mm,最大偏航角5°,最大仰俯角15°,最大滚动角40°,以及导航站最大导航距离120m等要求,对导向点点位设置及联测采取的技术措施包括:仪器吊篮(见图4)固定在管片上,仪器激光束发射器安置在接收靶几何轴线的延长线上,其偏差值与接收靶轴线形成的偏角必须小于5°,每100m进行一次导航站迁移,以满足接收靶对激光斑点直径和光束强度要求,每掘进10环进行一次导向点稳定情况检查,若发生位移,必须重新测定导向点坐标并在导向全站仪中修改;每掘进1环检查、重置导向全站仪的安平、后视照准、激光束在接收靶上的落点等,以确保导向结果的准确性[9]。
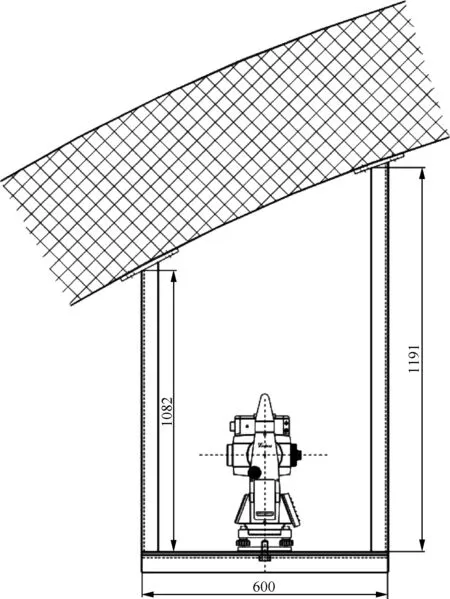
图4 导向点仪器吊篮示意图(单位:cm)
3.6 高程测量
穿黄隧洞掘进过程中,高程测量包括竖井高程传递测量和隧洞内高程测量两部分。从发包人提供的基准点采用国家二等水准测量精度进行联测,作为洞内高程控制的依据。
3.6.1 竖井高程传递测量
下游线隧洞采用经过检定合格的50m钢卷尺进行高程传递,即在井上后视完成后,井上、井下同时照准吊挂在竖井中的钢尺读数,然后井下对待定点前视读数,完成一组测量,以每次同样的方法测量三组,取其高差平均值推算井下待定点高程。上游线隧洞利用全站仪进行高程传递检查,即在竖井底高程点上安置全站仪,在点的正上方设置固定架,测量固定架至井下高程点的高差、井上测量高差控制点至固定架的高差,计算井下控制点的高程。经检查,该方法与吊挂钢尺法测量结果差值均在3mm内,之后,上游线竖井采用这种方法进行竖井高程传递测量。
3.6.2 洞内高程测量
隧洞每50环或导向点换站前在导向点附近设一高程点并标记,采用吊挂钢尺方法按照国家四等水准测量精度观测,在用水准仪后视后,水准仪和导向点上的导向全站仪水平视准轴同时读取钢尺上读数,求取高差。测量2组,取2组平均值计算导向全站仪视线高程。
3.7 断面测量
隧洞断面测量的目的有两个,一是根据断面测量成果计算隧洞中心位置,并与隧洞设计值比较,计算隧洞偏离轴线距离;二是利用断面横向和竖向直径差值计算断面椭圆度。
在管片脱离盾尾后及时进行断面测量,每5环测绘断面一条,每条断面测点不少于14点。随着隧洞不断掘进,根据横断面测量成果及时绘制隧洞轴线平面图和纵剖面图。隧洞贯通后根据洞内控制点平差成果对断面成果进行修正。
实际测量中,上游线利用TCR-402无棱镜反射全站仪施测;下游线采用断面仪施测。上下游线采用统一样板,断面图上显示桩号、环号、断面中心坐标、断面方位、断面中心与设计轴线差值、断面横向直径、竖向直径、椭圆度,断面后附带断面测量数据资料。
3.8 沉降观测
沉降观测包括地面沉降观测和洞内沉降观测。进行地面沉降观测的目的是及时了解和掌握隧洞施工对地面的扰动情况,从而调整管片壁后注浆的压力;进行洞内沉降观测的目的是及时掌握洞内管片的稳定情况,了解隧洞是否沉浮,保证成型隧洞的安全。
地面沉降观测中,事先沿隧洞轴线布设沉降点并标定里程,利用跟踪测量来控制地表沉降。洞内沉降观测时,在隧洞内每10环设一沉降观测点,某些特殊部位可加密,观测精度采用国家三等水准精度。管片成环后的观测数据作为隧洞沉降点的起始高程,一般情况下,盾尾后部100m内的沉降点每隔4天观测一次,位于盾尾后面100m以外的各沉降点每隔5~7天观测一次;以后随着隧洞的延伸及沉降趋向稳定,适当延长观测周期。
4 控制措施及效果
为了保证隧洞盾构掘进轴线符合设计轴线要求,除了承包人严格按照报批的测量控制方案做好现场测量控制外,承包人、监理人、发包人等在不同时期分别进行了复核检查。
a.承包人检查。盾构机下井前,因井下空间位置限制,除吊挂钢丝进行井下坐标传递外,还利用垂直投点仪对井下控制点进行检查,投点仪标称精度为1/300000,上游竖井检查结果,最大点位差值5mm,最小点位差值2mm;下游竖井控制点检查结果均在3mm内;隧洞掘进过程中,承包人每300环或长时间停滞恢复掘进前,全面进行控制测量,包括地面、竖井传导、洞内导线、导向点等。
b.监理人检查。监理人在盾构机下井前利用支导线方法对承包人井下控制点进行独立检测,检查结果与承包人测量结果差值均在6mm内;盾构机就位前,通过联合测量检测方式对盾构机支撑排架进行复核测量,对承包人测量成果进行确认。在上游线隧洞掘进至2000m、下游线掘进至1500m和3200m时对承包人洞内控制点进行独立测量检查,测量项目包括地面GPS测量、竖井传导测量、洞内控制导线测量、洞内高程测量等,检查结果,平面控制最弱点(最靠近盾构机处)差值在4cm以内,高程控制差值均小于2cm。
c.发包人检查。上、下游隧洞掘进至3200m时,发包人聘请专业机构独立进行贯通前测量检查,包括地面、竖井传导、洞内导线、洞内高程、盾构机姿态、南岸竖井接收面几何中心等测量检查,检查结果与承包人测量结果相近,平面控制最弱点差值在4cm内,高程点差值在2cm内,其他检查与承包人测量结果基本相同,差值均在10mm内。
穿黄隧洞盾构掘进经过承包人、监理人、发包人等方面复核检查,隧洞到达南岸竖井时,上游线隧洞横向、竖向贯通误差分别为18mm和22mm;下游线隧洞横向、竖向贯通误差分别为29.70mm和33mm。邙山隧洞到达南岸隧洞进口时,上游线隧洞横向、竖向贯通误差分别为23.80mm和8mm,下游线隧洞横向、竖向贯通误差分别为15.30mm和2mm。贯通误差均远小于设计要求,盾构隧洞实际轴线位置处于理想状态,为盾构机安全到达提供了可靠保证[10]。
5 思考与建议
a.及时进行施工测量控制点复核很重要。盾构始发时盾构机定位测量是盾构施工测量控制的关键点,但因竖井内场地空间限制,无法通过严格意义上的狭长三角形进行传导测量,井下控制点测量精度相对不高,因此,还利用垂直投点仪对井下控制点进行了校核检查,在盾构掘进80m左右时,又及时进行了竖井传导测量工作,用新的测量成果测定盾构机现状姿态,根据盾构机实际偏差值进行纠偏,并用新的测量成果引导盾构机掘进,保证了盾构掘轴线的准确性。
另一方面,由于盾构机进行隧洞掘进时,在液压油缸推力作用下,成型隧洞可能会发生左右漂移和上下沉浮,因此洞内距离盾尾较近控制点未必处于稳定状态,为此,洞内控制点复核测量应该常态化,特别是遇到自然灾害(如地震)时,必须立即进行控制点复核测量,确保洞内控制点正确。
b.选择成熟可靠的竖井传导测量方法很关键。在穿黄隧洞上游线隧洞施工前,现场曾提出向井下投一点,利用陀螺经纬仪进行方位测定,在此基础上进行洞内控制导线测量的方法。经过分析,由于仪器测量精度及洞内磁场等影响,陀螺经纬仪的定向精度可靠性无法满足穿黄隧洞允许贯通误差的要求,因此,要求仍采用成熟的常规方法进行竖井传导测量。
在隧洞掘进过程中,上、下游线隧洞均进行过洞内导线边陀螺经纬仪检查。上游线在1500m附近,用5″级陀螺经纬仪对洞内导线边(X7-D5)进行检测,测量方位与洞内控制导线方位相差16″;下游线隧洞用5″级陀螺经纬仪对洞内的两条导线边进行方位测量,测量成果与洞内导线方位比较,其中一条边相差6″,另一条边相差9″,且不符值符号相反。上述结果也验证了当初的判断。根据最终贯通结果,显然狭长三角形传导测量方法比较可靠。因此,对于通过竖井施工且贯通误差要求苛刻的隧洞掘进,最好采用常规、成熟的作业方法进行竖井传导测量。
c.隧洞贯通前的测量评估与复核很必要。为保证隧洞掘进到达南岸竖井时的轴线位置满足设计贯通误差要求,在距南岸竖井贯通面200~300m时,要求盾构机暂停掘进,由承包人、监理人和发包人分别进行全面测量检查。同时,发包人组织建管、监理、施工各方并邀请测量专家,召开隧洞贯通误差评估会议,根据各方测量检测结果评估贯通精度能否满足设计指标。
另外,将盾构姿态检测数据传至机构进行计算,将计算结果与盾构机姿态显示值进行比较,确定盾构机实际姿态与显示姿态的一致性。
上述检测和评估,对准确判定盾构掘进轴线的精度和合理确定剩余隧洞掘进控制方案发挥了重要作用,为最终实现盾构隧洞掘进高精度贯通提供了可靠保障。
猜你喜欢
工业安全与环保(2022年5期)2022-05-17
北京测绘(2021年7期)2021-07-28
建材发展导向(2021年12期)2021-07-22
装备制造技术(2020年11期)2021-01-26
水泵技术(2021年2期)2021-01-24
黑龙江水利科技(2020年8期)2021-01-21
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
郑州大学学报(工学版)(2020年6期)2020-02-23
中国水利(2015年16期)2015-02-28