基于机器人技术远程输电巡视的研究与实践
2018-12-19 03:18:26马丛淦杜觉晓吴淼喆张艺凡
电力安全技术 2018年11期
马丛淦,王 闯,杜觉晓,吴淼喆,郑 娜,张艺凡,李 炜
(国网北京市电力公司,北京 100031)
0 引言
目前专业巡检人员老龄化现象日趋严重,人员承载力整体下降。而面对线路运维管理工作日趋精细化趋势,加上工作经验丰富的职工较少,完成线路运维工作压力变大,未来靠人工完成日常的巡视工作已不现实。随着科技的发展,互联网技术的应用,机器人代替人类完成工作成为趋势,现就机器人代替人来进行输电线路巡检技术进行分析。
目前输电线路巡检包括:例行巡视(包括本体巡视和通道巡视)、带电登检、红外测温、弧垂测量、交叉跨越测量等工作。统计显示某检修分公司例行巡检的年度工作量是125 301工日,相当于100名专业巡检人员、275名通道巡视人员全年不休地开展各项例行巡检工作,并且带电登检、红外测温等工作均无法实现1次/年的工作标准,实际完成工作量在60 %—70 %。部分巡检项目未按公司标准开展巡检工作,不利于设备的安全稳定运行。而机器人依据设定好的程序,可实现线路的自动巡检,解决了输电线路人工巡检的漏查漏报问题,通过机器人的程序化操作,将输电巡检工作固化,使巡检质量可控能控。
1 技术原理
巡检机器人是在架空输电线路地线上行走,通过搭载可见光摄像机、红外热像仪、激光雷达等巡检设备,对输电线路及其附属金具、杆塔、线路走廊进行巡视的智能巡检设备。通过对地线进行局部改造,机器人可跨越杆塔实现全线路巡检;还可自主完成巡检任务规划、越障、线路巡检工作。巡检结果既可在线实时查看,也能导入后台数据管理系统进行整理、归类与分析。
在安装过程中需2人操作,一人上塔进行安装,另一人于地面进行牵引操作。在巡视过程中,机器人可自动实现杆塔间的跨越,摄像头(探头等)可根据需要调整角度,对地线、导线、连接部位以及周边环境等进行检测。
1.1 可实现的巡检项目
(1) 通过搭载可见光摄像机可实现本体巡视和通道环境巡视,2项工作可同步进行。
(2) 通过搭载红外热像仪可实现线路接头的红外测温。
(3) 通过搭载激光雷达系统,机器人可获取线路走廊图片及三维点云数据,经过后期数据处理与分析,可形成线路走廊三维立体模型,并计算导线弧垂、导线与导线及导线与其他物体的距离,实现弧垂测量及交跨测量。
(4) 通过搭载高清照像机可实现线路的带电登杆检查作业。
(5) 通过搭载除冰钻头可实现架空地线除冰和导线观冰。
1.2 机器人巡检技术条件
(1) 工作环境:机器人工作温度范围为-25—60 ℃,外壳防护等级IP65,允许工作风力12级,可在低温雨雪或高温天气工作。
(2) 电源及续航:机器人可通过安装在杆塔上的太阳能充电基站实现在线充电,满足远距离、长时间续航能力要求,每次充电时间6 h,可保障巡检8 km;也可以通过人工更换电池的方式实现不间断巡检。
(3) 巡检能力:机器人搭载可见光照像机,每秒可拍30张分辨率为1 920×1 080的高清图片,夜间可搭载星光像头实现微光夜视能力。
(4) 越障能力:可以穿越悬垂线夹、防震锤、接续管,并通过塔头局部改造,加装过桥实现耐张杆塔的穿越。
(5) 数据传输:通过4G无线传输,实现危急、严重缺陷实时回传。
2 技术比较
同人力相比,机器人巡检具有如下优势:
(1) 比人工巡检质量高:机器人依据设定好的程序,可实现线路的自动巡检,解决了输电线路人工巡检的漏查漏报问题;通过机器人的程序化操作,将输电巡检工作固化,巡检质量可控能控;
(2) 比人工巡检效率高:真正实现了运检一体化,将本体巡视、通道巡视、带电登检、红外测温同步完成。
各项巡检工作标准及标准工时如表1所示。与人工巡检相比,机器人巡检效率明显提升,其中本体巡检(含红外测温)较人工巡检提升471.8 %,通道巡检较人工巡检提升111.5 %。

表1 巡检工作标准及标准工时
(3) 比人工巡检视野好:机器人从高空巡视,可以实现输电线路的无死角巡视,有益于发现密封院落内的潜在隐患;同时三维描述可以精确测量隐患与带电体、带电体与带电体之间的距离,解决了带电测量操作难度大、风险高的问题;
(4) 比人工巡检更经济:机器人可以同步开展各项例行巡检工作,相对人工巡检更有经济优势,也比直升机巡检更灵活、更便宜、更有效。
3 应用实例
3.1 110 kV退运线路试验
目前,该检修分公司对某耐张杆塔塔头进行了改造(为机器人过耐张地线定制了“过桥”),并在某110 kV退运线路8—10号塔间对机器人巡视功能进行试验,巡检效果如下:
(1) 机器人重量适当,操作人员提升安装方便;
(2) 机器人结构严密,在架空地线上行走平稳,可安全稳定运行;
(3) 机器人可以顺利通过10号耐张杆塔,通过时间为11 min。
3.2 220 kV在建线路试验
某220 kV在建测试线路全线29.782 km,共95基。其中,直线杆64基,全部为铁塔;耐张杆31基包括铁塔28基,钢管杆3基;全线30个耐张段。巡检方案如下:
(1) 机器人平均巡检效率为8 km/天,在220 kV全线共设3个充电点,分别在线路起点和终点搭设上下线装置;除每次充电6 h外,机器人可不间断巡检;
(2) 在线路金具安装完毕后立即开展机器人巡检工作,并完成应用机器人搭载三维激光扫描成像仪和红外热成像仪的第1次全扫描工作;第1次全扫描工作完成后2日内将机器人巡检报告提供给输电运检单位,输电运检单位负责开展影像资料价值评估工作,并上报检修公司的指挥中心、运维检修部进行下一步的分析处理。
3.3 实际线路巡检情况
开展巡检前,在杆塔塔身搭设上下轨道,将机器人放置在轨道下端的平台上,机器人可自动上下塔,在多条线路上转场作业,充分发挥其最大效用。
巡检前对机器人行为完整定义,机器人上线后根据预设程序自主执行巡检,依次对设备进行拍照、检测,如图1所示。发现线路异常自动告警,提醒控制中心进一步核查和确认。这样,就可实现对带电线路的巡检检查。

图1 机器人巡检过程示意
4 巡检报告要求
4.1 巡检报告周期
依据巡检周期制定巡检报告的周期(见表2),如遇到危急隐患或缺陷,应及时上报。
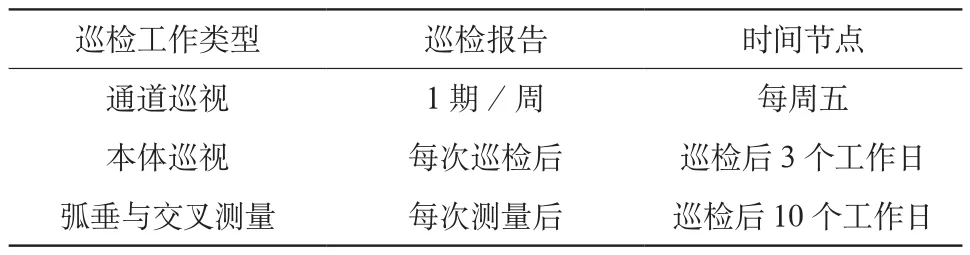
表2 针对不同巡视工作的巡检报告周期
4.2 巡检报告内容
巡检报告应包括巡检日期、设备名称及段落、工作量(里程数、基数)、工作时段、工作类型(通道巡视、本体巡视、弧垂与交叉测量),以及发现问题、历史数据对比分析,机器人巡检性能分析;并在报告后形成交叉跨越台账、环境隐患台账、设备缺陷台账等。
5 下一步研究方向
5.1 覆冰观测业务需求
针对线路覆冰精确观测覆冰厚度问题,建议研究在导线上加装“覆冰观测标尺”。为应对导线不均匀覆冰,观测标尺应360°有刻度;同时机器人应具备多角度精确观测的能力,从而通过机器人的高清摄像机实现刻度的精准观测。
5.2 巡检系统实时回传现场危重缺陷
为应对巡检过程中发现的危急缺陷或隐患,机器人巡检系统应具备危重隐患、缺陷的自动识别能力,并通过APP等方式实时回传画面,以便业务人员及时处理问题,从而避免危重隐患、缺陷影响线路安全运行。
5.3 机器人巡视后期技术研发
解决现场人员的人员紧缺问题,同时增加现有技术图像标准的宣贯,增强使用人员对于远程设备的掌控力度,与现有图像识别、大数据分析技术的成果相结合,在无人状态下由电脑自动识别报警,减轻监视人员的工作压力。
6 结束语
机器人巡检系统融合移动互联的开发理念,应用了现有主流巡检机器人技术,在应用过程中融合了生产经验和机器人特有图像采集识别技术,实现技术与现场的协调配合,可为现代化电网运维检修管理和实施提供支撑,缓解输电人员压力。
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
卫星应用(2022年1期)2022-03-09 06:22:30
金桥(2021年4期)2021-05-21 08:19:20
纺织科学研究(2021年1期)2021-03-19 05:18:14
电子制作(2019年11期)2019-07-04 00:34:36
电子制作(2019年7期)2019-04-25 13:17:14
电子测试(2018年23期)2018-12-29 11:12:02
电线电缆(2017年4期)2017-07-25 07:49:46
光学精密工程(2016年3期)2016-11-07 09:03:43
电测与仪表(2016年23期)2016-04-12 00:23:14