
基于多特征融合的前方车辆检测的应用与研究
2018-12-15 11:25马龙刘胜
计算机时代 2018年10期
关键词:支持向量机
马龙 刘胜

摘 要: 为了提高前方车辆检测的准确率和效率,提出了一种改进的多分辨率下的多特征提取的方向梯度直方图(HOG)特征融合算法。首先将样本扩缩为分辨率不同的图像,后转为YUV色彩空间,其次加权融合Y,U,V多通道方向梯度直方图(HOG)形成训练特征,最后采用支持向量机(SVM)对融合后的训练特征车辆分类器训练和检测。实验表明,该算法比传统HOG提取特征算法车辆检测率更高,效率高达98.92%,并且在不同天气状况下均有良好的检测效果和鲁棒性。
关键词: 方向梯度直方图; YUV色彩空间; 支持向量机; 车辆检测; 多特征融合
中图分类号:TP391.4 文献标志码:A 文章编号:1006-8228(2018)10-42-03
Abstract: To improve the accuracy and efficiency of vehicle detection, a multi-feature extractive histogram of oriented gradient (HOG) fusion algorithm is proposed. Firstly, the sample pattern is expanded and narrowed to images with different resolutions and converted to YUV color space, followed by weighted fusion Y, U, V multi-channel histogram of oriented gradient (HOG) training features, Finally, support vector machine (SVM) is used to train and detect the trained features. The experiment shows that this algorithm has a higher detection rate than the traditional HOG extraction feature algorithm, and the efficiency is as high as 98.92%,and have good detection effect and robustness under different weather conditions.
Key words: HOG; YUV color space; support vector machine; vehicle detection; multi-feature fusion
0 引言
快速且精准的车辆检测系统能在交通出行中避免潜在的危险,可以有效减少其带来的交通隐患,其中基于视觉的车辆检测也一直是图像处理、计算机视觉的重要研究课题[1-2]。目前基于视觉的车辆检测可以分为两个阶段:在特征提取阶段,系统提取车辆的阴影[3],颜色[4],纹理等外观特征,从而得到可能存在车辆的候选区域,以提高感兴趣区域内的检测效率。检测验证阶段主要有基于模板[5]和基于学习[6]两种方法。基于模板[7]的方法鲁棒性好,但实时性较差,检测效果不稳定;基于学习的方法是目前车辆检测领域研究的重点,且检测效果较好。本文在特征提取阶段选用的是方向梯度直方图(HOG), HOG具有注重轮廓不过多考虑轮廓内部的形态特点和较强的描述物體轮廓能力。而在检测验证阶段,考虑到车辆检测本质就是二分类的问题,支持向量机(SVM)本身具有较强的分类的能力,故选为本文车辆检测的分类器。
1 车辆检测方法概述
在传统的HOG特征提取中,由于忽略了样本图像的色彩信息,当车辆的灰度空间和地面很接近时,灰度域的局部梯度就不明显,从而导致车辆检测率降低和误检率增高,本文针对上述问题,提出了一种改进的多分辨率下的YUV色彩空间相融合的方向梯度直方图(HOG)和支持向量机(SVM)的前向车辆检测算法,具体步骤为:①将样本分辨率扩缩为72×72,32×32之后,由RGB色彩空间转为YUV色彩空间,分别提取图像的Y、U、V三通道数据模板,保存为二维矩阵MU,MU,MV;②在对应的二维矩阵中,分别提取和计算出多通道特征HY、HU、HV;③把得到HOG多通道特征进行加权融合成最终训练特征H_HOG;④融合后的H_HOG特征用支持向量机(SVM)进行训练,生成训练模型。
2 特征提取
2.1 RGB色彩空间转为YUV色彩空间
YUV是一种基于人眼感知的色彩空间,其中“Y”表示明亮度,也就是灰阶值;而“U”和“V”表示的则是色度,其作用是描述图像的色彩和饱和度。采用YUV色彩空间是因为它的亮度信号Y和色度信号U、V是分离的,其中RGB色彩空间转为YUV色彩空间公式为:
2.2 HOG特征提取与融合
方向梯度直方图(histogram of oriented gradient, HOG)特征是用于计算机视觉和图像处理中的对象检测的特征描述器,已经广泛应用于在行人检测[8]和交通标志检测[9]中。以下是HOG特征提取具体的实现方法:
第一步:计算图像像素点的梯度幅值与梯度方向:求出像素点横坐标和纵坐标方向的梯度,据此计算每个像素(x,y)位置的梯度幅值和梯度方向。
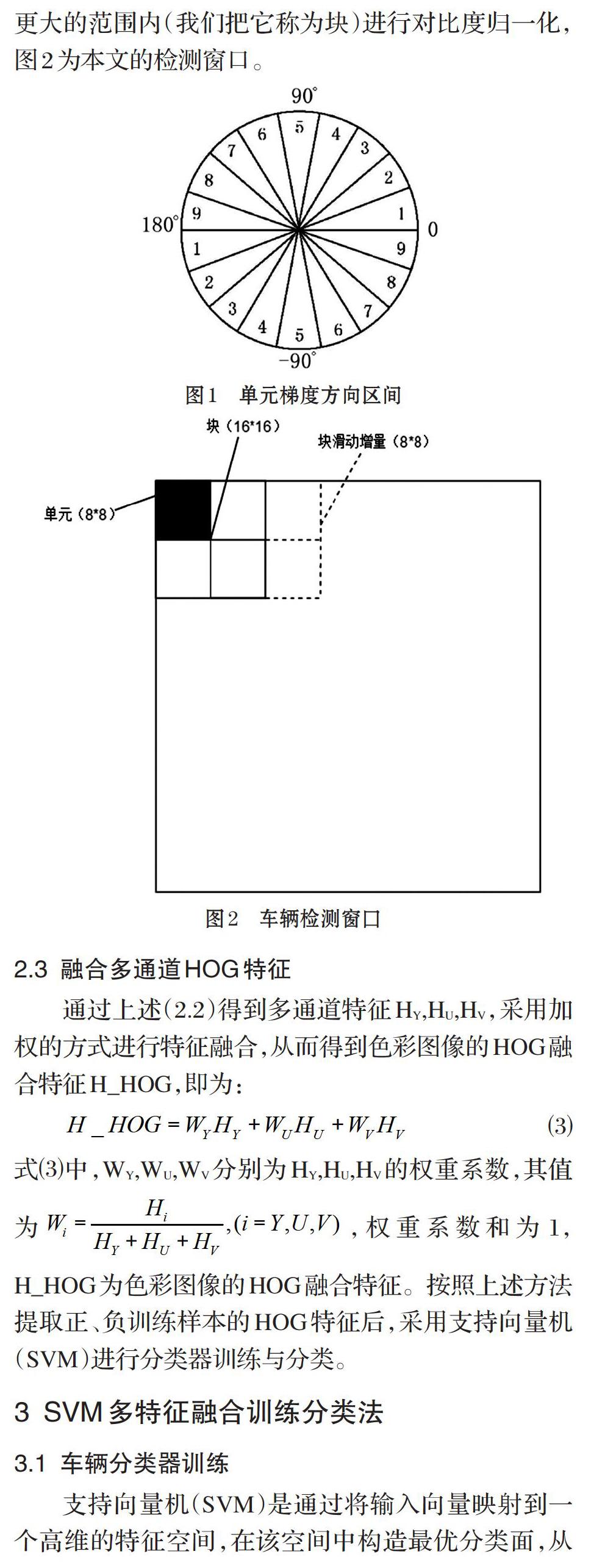
第二步:将梯度方向均匀量化成9个方向(如图1所示),每个像素采用梯度幅值加权的方式进行投票,计算出计算各方向梯度积分图。
第三步:首先将图像分成小的连通区域,称之为细胞单元,然后获取单元中每个像素的梯度或边缘方向直方图。最后组合这些直方图形成特征描述器。为了提高性能,我们还可以把这些局部直方图在图像更大的范围内(我们把它称为块)进行对比度归一化,图2为本文的检测窗口。
2.3 融合多通道HOG特征
通过上述(2.2)得到多通道特征HY,HU,HV,采用加权的方式进行特征融合,从而得到色彩图像的HOG融合特征H_HOG,即为:
式⑶中,WY,WU,WV分别为HY,HU,HV的权重系数,其值为,权重系数和为1,H_HOG为色彩图像的HOG融合特征。按照上述方法提取正、负训练样本的HOG特征后,采用支持向量机(SVM)进行分类器训练与分类。
3 SVM多特征融合训练分类法
3.1 车辆分类器训练
支持向量机(SVM)是通过将输入向量映射到一个高维的特征空间,在该空间中构造最优分类面,从而实现二类或多类的分类。为了满足HOG特征和检测速度的需求,本文选用线性SVM二分类,进行HOG特征的训练分类。对于线性二分类,为了使得所有的训练样本都能被正确地分类,转化为一个二次型优化问题:,则约束条件为:
3.2 支持向量机(SVM)参数优选
选取合适的参数可以得SVM具有较强的分类能力和泛化能力,当参数C越小时,分类器对样本数据中误判的样本惩罚程度就越小,训练误差则变大;当参数C越大时,表示对错误例惩罚程度越大,可能会导致模型过拟合的情况。而核参数σ主要影响样本数据在高维特征空间中分布的复杂程度。本文采用的是文献[10]中在 LibSVM工具箱中,通过网格搜索和交叉验证的方法得到的最优参数,其验证精度为95.89%。
4 实验结果与分析
本文的实验程序是在python3.6下实现的,性能测试实验在Inter(R) core i5 CPU、2G内存,64位Windows 10操作系统的计算机上运行。其中训练和测试的正负样本均使用GTI数据库中的图片,各800张,大小都是,其中正样本包括颜色不同的越野车、轿车、货车等;负样本为包含路边树木、道路路面、护栏等背景图。
为了证明本文算法的有效性和可行性,实验从两个部分验证:
⑴ 将本文算法与传统HOG检测车辆算法进行对比实验,分别统计得到车辆检测的结果如表1,从表可知本文算法在检测率和误检率两项指标均优于传统算法。
⑵ 测试选自不同天气情况下的车辆前置摄像头的真实数据,结果如图3所示(分别为晴天、雾天、雨天),均取得良好的检测效果。
5 结束语
针对实际应用中对于车辆检测的检测效率和准确率,本文在提取的梯度轮廓特征的基础上加以改进,在多分辨率下提取融合的YUV色彩空间的HOG特征,比传统的HOG特征包含更多色彩信息,能有效避免传统提取算法干扰物对检测效果的影响。经过多次实验,证明了检测的准确率有明显提高,能适应不同天气的条件且具有较好的鲁棒性,在总体性能上有較大的提升。但本文算法对前方较多车辆和重叠严重的情况下检测不太理想,这将作为后续的研究重点,进而提高车辆检测系统的性能。
参考文献(References):
[1] Li Xing,Guo Xiao song. A HOG feature and SVM based method for forward vehicle detection with single camera [C]//IEEE International Conference on Intelligent Human -Machine Systems and Cybernetics,2013:263-266
[2] 杨强,齐美彬,蒋建国.一种用于车辆检测的选择性背景更新方法[J].合肥工业大学学报(自然科学版),2011.34(4):509-514
[3] Han S, Han Y, Hahn H. vehicle detection Method using Haar like Feature on Real Time System[J].Engineer and Technology,2009.59:455-459
[4] Guo D,Fraichard T,Xie M,et al. Color Modeling by Spherical Influence Field in Sensing Driving Environment[C]//Proceedings IEEE Intelligent Vehicle Symposium.2000:249-254
[5] Handmann U,Kalinke T,Tzomakas C,et al. An Image Processing System for Driver Assistance [J]. Image and Vision Computing,2000.18(5):367-376
[6] Wu Jun-wen,Zhang Xue-gong. A PCA Classifier and Its Application in Vehicle Detection[C]//Proceeding IEEE International Joint Conference on Neural Networks,2001:600-604
[7] Gepperth ART. Co training of context models for real timevehicle detection[C]//2012 IEEE Intelligent Vehicles Symposium,2012:814-820
[8] Zhu Qiang,Yeh Meichen, Cheng K-T. Fast Human Detection Using a Cascade of Histograms of Oriented Gradients[C]//proceedings IEEE International Conference on Computer Vision & Pattern Recognition,2006.2:1491-1498
[9] 陈龙,潘志明,毛庆洲等.利用HOG LBP自适应融合特征实现禁令交通标志检测[J].武汉大学学报(信息科学版),2013.38(2):191-194
[10] 李星,郭晓松,郭君斌.基于HOG特征和SVM的前向车辆识别方法[J].计算机科学,2013.40(11):329-332
猜你喜欢
现代电子技术(2016年23期)2017-01-12
现代电子技术(2016年23期)2017-01-12
无线互联科技(2016年13期)2017-01-10
中国水运(2016年11期)2017-01-04
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
科学与财富(2016年28期)2016-10-14
考试周刊(2016年53期)2016-07-15
