
基于捷联惯导的变压器内微缆机器人定位研究
2018-12-14 09:05赵晓军田粮川孙文博刘阳
现代电子技术 2018年24期
关键词:变压器
赵晓军 田粮川 孙文博 刘阳
关键词: 捷联惯导; 四阶龙格库塔法; 变压器; 微缆机器人; 卡尔曼滤波算法; 定位系统
中图分类号: TN713?34; TP393 文献标识码: A 文章编号: 1004?373X(2018)24?0035?04
Research on micro?cable robot positioning based on strapdown
inertial navigation for transformer
ZHAO Xiaojun, TIAN Liangchuan, SUN Wenbo, LIU Yang
(School of Electronic Information Engineering, Hebei University, Baoding 071000, China)
Abstract: A micro?cable robot positioning system based on strapdown inertial navigation is designed to reduce the cost of regular internal inspections of the large?scale transformer and resolve the positioning problem during the internal inspection of the large?scale transformer. The system is equipped with such inertial measurement units as acceleration sensor, gyro sensor and camera. The fourth?order Runge?Kutta method is used to solve the attitude matrix. The attitude matrix data is modified by combining the Kalman filtering algorithm to integrate accelerometer sensor data, so as to determine the moving speed and position of the robot. The robot positioning can be periodically corrected by using the camera, so as to guarantee the accuracy of the position. The experimental data shows that the system has strong autonomy and high navigation accuracy within a short period of time, which fully conforms to the positioning requirement of the detection system in the large?scale transformer.
Keywords: strapdown inertial navigation; fourth?order Runge?Kutta method; transformer; micro?cable robot; Kalman filtering algorithm; positioning system
在电力系统的运行过程中,变压器承担着重要作用。同时,压器故障也是整个电力系统稳定性的重要隐患,对直流输送功率和交流网架有很大的影响。及时监测和发现变压器内部故障,迅速进行故障定位、处理内部故障,使大型变压器安全生产运行十分重要。
气相色谱法是通过分析绝缘油中溶解气体,进而对变压器内部状况进行诊断定位。超声波是通过监测变压器的局部放电异常状况,进行定位计算。变压器绕组匝间短路故障定位根据匝间短路后对应匝波阻抗改变引起的反射电压突变,来实现绕组匝间短路故障定位计算。这些定位方法都是通过对变压器内某一变量的研究,从而检测变压器内部运行情况,进行定位,这些系统检测方法并没有反映变压器内部的工作状态和故障水平,检测变压器内部综合运行情况不准确,故障定位不精确。如果是通过人工进行检查的话,需要吊罩拆开箱体或将检测技术人员送入变压器内部进行检查,这样不仅需要将变压器内部绝缘油排空,浪费大量人力,还极易造成变压器内部污染,变压器安全运行带来二次隐患。因此寻求一种能够系统检测变压器内部状态的潜测机器人定位系统或方法具有重要意义。
针对这种现象设计了变压器内微缆机器人检测系统,它是一种体积很小可以在变压器内自由游动的装置,一方面可以通过摄像头观察变压器内的运行情况,同时定位;另一方面通过定位系统可以控制潜测机器人在变压器的姿态,确定机器人在变压器的三维定位信息。本文主要研究潜测机器人在变压器的定位。对机器人定位技術来说,因为RFID射频是利用无线射频进行非接触位置定位的通信技术,能进行区域定位,但不能在变压器安放;WiFi定位技术是通过无线信号强弱进行位置计算的定位技术,受变压器内部环境影响波动较大;GPS定位技术由于变压器的密闭性也不适用。而捷联惯导系统是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,可在空中、地面、水下等各种复杂环境下工作。综上所述,本文采用捷联惯导技术的方法对于机器人在变压器的定位进行了研究。
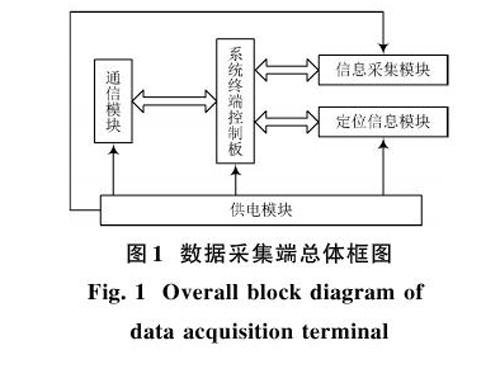
1 系统总体设计
本设计完成一种室内机器人检测定位系统设计,它可通过上位机控制其状态,进而控制检测系统终端在室内空间的来回自由走动。室内检测机器人定位系统包括系统终端控制板、定位信息模块、通信模块、信息采集模块以及供电模块。检测系统的设计总体框见图1。
通过数字摄像头对室内特殊部位进行重点检查,对室内情况进行有效监控,实时传输室内图像,同时通过终端搭载的测距模块和MEMS陀螺仪模块测得检测系统终端在室内移动的距离、仰角、偏航角等信息。然后将采集到的信息进行处理存储,同时把处理后的信息通过无线通信模块传送到上位机,数据传送到上位机后再经过一定的算法可以得到机器人检测系统设计终端在室内三维空间的定位情况。
2 检测系统硬件设计
2.1 系统终端控制板
本系统终端控制板采用的主控芯片为STM32F4。该芯片具有低功耗、外设接口、信息处理能力快等优良特性。同时,STM32F4的主频也提高了很多,达到168 MHz,可获得 210 DMIPS 的处理能力,并且自带摄像头接口,这使得其在图像处理方面更加方便,具有非常广泛的应用前景。
2.2 信息采集模块
系统终端控制板上配置有OV5640摄像头图像模块,其主要作用是对室内的情况进行采集,将采集接收的数据传送到上位机,然后实时显示室内的情况。OV5640是OmniVision 公司生产的高清像素图像传感器,其最高可输出500万像素的彩色圖像,输出图像清晰。
2.3 定位信息模块
陀螺仪模块是由3轴加速度、3轴陀螺仪、3轴磁力计及其外围电路组成。它采用的是君悦智控科技有限公司生产的MPU9250型号的复合型九轴陀螺仪模块。动态测角精度达到0.05°,最高达到200 Hz的数据输出频率,量程加速度为±16 g,角速度为2 000 (°)/s,稳定性加速度为0.01 g,角速度为0.05 (°)/s。
3 系统终端定位原理与分析
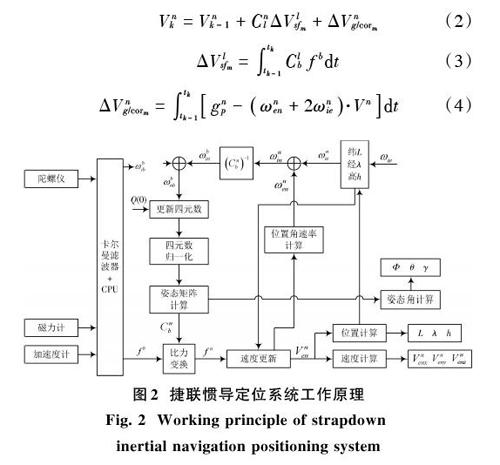
捷联惯导定位系统将输出的比例信息经过坐标变化,然后求解得到速度和位置导航信息。在捷联式惯导定位系统中为了得到速度和位置,需要将比力加速度通过加速度计测量出来,然后使用导航处理器将其转换到导航坐标系。为了实现这个矢量变换,导航处理器需要知道安装在检测机器人上的捷联惯导传感器和惯性坐标系之间的角度方位,它可以计算出来。
在捷联惯导系统中,导航处理器解算出导航平台。本文设地理坐标系为导航系,需先用惯性测量元件陀螺仪测量的角速度[ωbib],解算角速度[ωnin],两者算出姿态变化角速率,继而计算检测机器人姿态矩阵[Cbn],然后将检测机器人的姿态角信息从姿态矩阵的元素中提取出来。惯性元件加速度计测量比力信息[fb],结合[Cbn]变换到导航坐标系得到比力[fn],经过积分解算便可得导航坐标系中检测机器人的速度和位置信息。其系统工作原理见图2。
4 系统软件设计
由惯导定位系统基本原理可知速度变化率微分方程为:
[Vn=CnlClbfb-ωnen+2ωnie·Vn+gn] (1)
式中:[Vn]表示检测机器人运动的速度;g是重力加速度;[fb]表示比力加速度,其值可由加速度计测量。式(1)积分得到检测机器人在[tk]时刻的速度:[ΔVlsfm]表示由比力加速度引起的速度增量,也就是比力增量;[ΔVng/corm]用来表示在更新周期T内总的速度增量。
[Vnk=Vnk-1+CnlΔVlsfm+ΔVng/corm] (2)
[ΔVlsfm=tk-1tkClbfbdt] (3)
[ΔVng/corm=tk-1tkgnp-ωnen+2ωnie·Vndt] (4)
设地理坐标系为解算的导航坐标系,检测机器人位置定位计算就是采煤机所处高度h和经度λ、纬度L的计算。南北方向的速度引起纬度的变化,东西方向的速度引起经度的影响,将加速度计测得的比力信息变换到导航坐标系,得到解算坐标系的加速度信息。检测机器人定位微分方程为:
[L=VnRy+h,λ=VneRx+hcos L,h=Vnu] (5)
因为加速度传感器输出的是离散数据且采样频率高,根据高等数学和数值分析可将检测机器人在传感器单个采样间隔内的运动近似视为匀加速直线运动。其速度采用平均值法,结合式(2)和式(5)可以求得机器人的位置信息:
[Lk=Lk-1+Vnk-1+Vnk2Rmk-1+hk-1λk=λk-1+Vnek-1+Vnek2Rnk-1+hk-1cos Lk-1hk=hk-1+12Vnuk-1+Vnuk] (6)
式中:
[Rn=Re1+esin2L,Rm=Re1-2e+3esin2L]
e为地球的曲率;[Re]为地球长度半径;L为纬度。
5 实验结果与分析
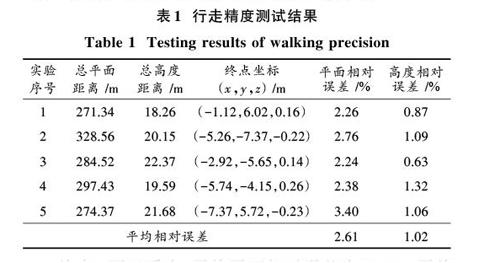
本文是研究捷联惯导系统在大型变压器内定位的应用,对其算法进行理论分析和实验研究,主要针对应用捷联惯导定位检测机器人位姿的算法进行模拟实验研究,目前还属于理论研究和系统方案设计阶段,同时考虑到其他因素,文中用手驱动检测机器人在空的大型变压器内运动进行数据采集,其实验的效果和原理是一致的,不影响实验对算法有效行的估计。该次实验测试由被定位人员携带检测机器人在大型变压器内三维空间中任意行走,包括大型变压器内同一水平线的行走和竖直方向的行走,最终再回到出发点,记录最终的坐标值,该值即为行走定位误差。每次行走测试总距离大于200 m,进行5次测试。测试结果如表1所示。
从表1可以看出,平均平面相对误差为2.61%,平均高度相对误差为1.02%,可以满足大型变压器内定位要求。本系统因其可短时间内进行高精度自主定位的特性,可在复杂环境进行目标定位,从而具有较高的应用价值。
6 结 论
本文提出一种通过三轴加速度、陀螺仪传感器的惯性测量单元估计大型变压器内检测机器人的运动状态,实现对其动态定位跟踪的方法。实验结果表明,该系统短时间内可以对检测机器人进行高精度的定位,完全符合检测系统在大型变压器内的定位需求,而且本文所提出的方法能够为大型变压器内检测机器人定位跟踪在工业中的应用提供借鉴,可以为变压器现场内部检查发生革命性的变化,大幅降低检查成本,避免吊罩拆开箱体而造成影响变压器原有的设计性及可靠性的弊端,具有广阔的市场前景和巨大的经济效益。
参考文献
[1] 王磊,汪洲,任元,等.捷联惯导系统中卡尔曼滤波的应用研究[J].计算机测量与控制,2017,25(6):139?141.
WANG Lei, WANG Zhou, REN Yuan, et al. Application of Kalman filter in strapdown inertial navigation system [J]. Computer measurement & control, 2017, 25(6): 139?141.
[2] 黄荣辉,冯迎宾,李勋,等.基于WiFi遥控的油浸式变压器内部检测机器人研究[J].机械工程师,2017(6):73?76.
HUANG Ronghui, FENG Yingbin, LI Xun, et al. Study on fault detection robot for oil?immersed transformer based on WiFi control [J]. Mechanical engineer, 2017(6): 73?76.
[3] 李勋,王亚彪,黄荣辉,等.油浸式变压器内部检测机器人结构设计与分析[J].机械工程师,2017(3):35?38.
LI Xun, WANG Yabiao, HUANG Ronghui, et al. Structure design and analysis of oil?immersed transformer internal inspection robot [J]. Mechanical engineer, 2017(3): 35?38.
[4] 吴哲明,孙振国,张文增,等.基于惯性测量单元旋转的陀螺漂移估计和补偿方法[J].清华大学学报(自然科学版),2014,54(9):1143?1147.
WU Zheming, SUN Zhenguo, ZHANG Wenzeng, et al. Gyroscope bias estimation and compensation by rotation of the inertial measurement [J]. Journal of Tsinghua University (Science and technology), 2014, 54(9): 1143?1147.
[5] 张露.基于捷联惯导的采煤机位姿解算算法研究[D].西安:西安科技大学,2014.
ZHANG Lu. The research based on strapdown inertial navigation of shearer position and posture calculate algorithm [D]. Xian: Xian University of Science and Technology, 2014.
[6] 谢鹏程.基于单摄像头的运动目标跟踪定位技术研究[J].计算机光盘软件与应用,2012,15(18):82?84.
XIE Pengcheng. Research on moving target tracking and positioning technology based on single camera [J]. Computer CD software and applications, 2012, 15(18): 82?84.
[7] 曲东才.捷联惯导系统发展及其军事应用[J].航空科学技术,2004(6):27?30.
QU Dongcai. Development of strapdown inertial navigation system and its military application [J]. Aeronautical science and technology, 2004(6): 27?30.
[8] 郑新芳.视觉惯导融合实时6DOF机器人定位方法研究[D].北京:北京交通大学,2017.
ZHENG Xinfang. Research on visual inertial navigation integrated real?time 6DOF robot positioning method [D]. Beijing: Beijing Jiaotong University, 2017.
[9] 王泽根,谭静,王金柱.基于组合导航的管道内部定位仿真与误差分析[J].西南石油大学学报(自然科学版),2017,39(2):163?171.
WANG Zegen, TAN Jing, WANG Jinzhu. Simulation and error analysis for pipeline internal positioning based on integrated navigation [J]. Journal of Southwest Petroleum University (Science & technology edition), 2017, 39(2): 163?171.
[10] 刘宇伦.基于地磁辅助系统的捷联惯导系统设计[D].南京:南京理工大学,2017.
LIU Yulun. Design of strapdown inertial navigation system based on geomagnetic auxiliary system [D]. Nanjing: Nanjing University of Science and Technology, 2017.
[11] 黃东,杨凌辉,罗文,等.基于视觉/惯导的掘进机实时位姿测量方法研究[J].激光技术,2017,41(1):19?23.
HUANG Dong, YANG Linghui, LUO Wen, et al. Study on measurement method of real?time position and attitude of roadheader based on vision/inertial navigation system [J]. Laser technology, 2017, 41(1): 19?23.
[12] 王赟赟,李建民,侯文.基于组合导航的汽车姿态数据采集系统设计[J].电子产品世界,2017,24(1):44?47.
WANG Yunyun, LI Jianmin, HOU Wen. Design of automobile attitude data acquisition system based on integrated navigation [J]. Electronic engineering product world, 2017, 24(1): 44?47.
[13] 赵广杰,许忠信,杨炼,等.基于FPGA的双摄像头定位系统的设计与实现[J].电视技术,2009,33(z2):220?222.
ZHAO Guangjie, XU Zhongxin, YANG Lian, et al. Implementation of positioning system using two cameras based on FPGA [J]. Video engineering, 2009, 33(S2): 220?222.
猜你喜欢
商品与质量(2021年43期)2022-01-18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
经济技术协作信息(2018年7期)2019-01-14
通信电源技术(2018年3期)2018-06-26
电子制作(2017年8期)2017-06-05
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05
电子制作(2017年10期)2017-04-18
现代工业经济和信息化(2016年4期)2016-05-17
通信电源技术(2016年3期)2016-03-26
