基于模糊GO法的飞机主动侧杆系统可靠性研究
2018-12-06 02:26:56张慕天段富海杜东伟
机电工程技术 2018年10期
张慕天,段富海,※,杜东伟
(1.大连理工大学机械工程学院,辽宁大连 116023;2.航空工业兰州万里航空机电有限责任公司,甘肃兰州 730070)
0 前言
飞行操纵系统是飞机最重要的构成系统之一。随着飞行控制技术的不断发展,飞机电传操纵系统因其结构简单、体积重量小、易于维护、操纵灵敏度高等特点,逐渐成为飞行操纵系统的发展主流[1]。
飞机驾驶杆主要有中央驾驶杆和侧驾驶杆两种形式。侧杆具有体积较小、易于操控、能降低驾驶杆对座舱空间的要求、能改善飞机的操纵品质、能减轻飞行员的工作负荷等优势[2]。主动侧杆配备有人感系统,可以将飞机飞行状态信息以操纵杆力的方式传递给驾驶员,从而加强驾驶员的情景意识,提升飞机的飞行品质[3]。主动侧杆能够弥补被动侧杆的缺点,比被动侧杆更符合人机工效学,成为首选的操纵装置,在国内外具有较好的发展前景。
GO(Goal-Oriented)法是以成功为导向的系统概率分析方法,适用于解决多状态、有时序系统的可靠性分析问题[4]。GO法在20世纪60年代由美国Kaman科学公司提出;20世纪70年代Kaman公司增加了操作符法,用于核电站可靠性和安全性分析;20世纪80年代,美国电力研究所和日本东京船舶研究所[5]分别对GO法进行了修改和发展。近年来,张丽娜[6]等首次提出基于模糊GO法的飞机备件支援系统可靠性分析方法;金霞[7]等研究了电动静液作动器系统基于GO法的可靠性分析与安全评估方法;刘林林[8]等提出了一种基于贝叶斯网络的GO法新算法;姚安林[9]等基于GO法原理建立了输气站场可靠性分析方法。
传统GO法是基于确定的概率值进行可靠性计算,而常见的系统通常比较复杂,会受到数据统计、环境变化等误差的干扰,并且系统各部件之间会相互影响,具有不确定性。模糊数学是研究和处理模糊性的数学方法,将传统GO法和模糊数学相结合,可以处理系统的随机和模糊现象[10]。本文在建立飞机主动杆系统可靠性分析的GO法模型基础上,将模糊数学理论和GO法相结合,计算飞机主动侧杆成功工作的概率,并通过与故障树法(FTA)计算结果进行对比,验证了模糊GO法计算的正确性。
1 飞机主动驾驶杆系统
如图1所示,飞机主动侧驾驶杆系统主要由监控计算机、微控制执行装置和驾驶杆三部分组成[11]。
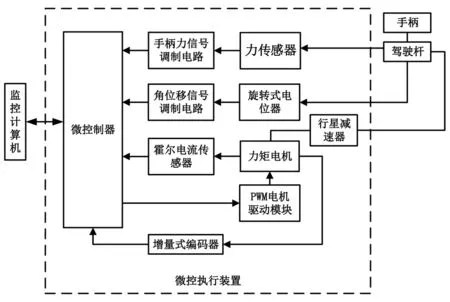
图1 飞机主动侧杆系统结构框图Fig.1 Structurediagram of Active Side Stick
监控计算机的作用主要是得到驾驶杆的状态和操控数据,实现对飞机的飞行状态监控。
控制执行装置主要由力矩电机、减速器、电位器、传感器和各种调制电路模块等组成。其中:力矩电机与行星减速器相连,行星减速器的输入端和力矩电机的输出轴相连,降低了力矩电机的转速并且调高其转矩,行星减速器的输出端与驾驶杆手柄相连,从而实现拖动驾驶杆手柄旋转和为驾驶杆手柄提供反馈力的功能。霍尔电流传感器主要用来测量力矩电机的电流,并将结果输入微控制器。增量式编码器和力矩电机的输出轴相连,用来测量电机的转速和转角,从而得到驾驶杆的角速度。旋转式电位器和驾驶杆相连,用于测量飞机驾驶员操纵驾驶杆时手柄的偏转角度。力传感器和驾驶杆相连,用于测量飞机驾驶员操纵驾驶杆时力的大小。PMW电机驱动模块主要用来放大电机控制信号,从而驱动力矩电机。微控制器主要用来接受反馈回来的手柄力信号、手柄角度信号、手柄速度信号、霍尔传感器电流信号,通过内部算法处理,得出预期电机的转速和转矩大小,然后输出控制电流实现对驾驶杆手柄的反馈控制。
2 三元组模糊数理论
L-R型模糊数是模糊数的一种,可以解决不确定环境下的问题。
如果模糊数A͂的隶属函数满足

R(x)为减函数,左连续,0≤R(x)<1,xl→im+∞R(x)=0 。
则称模糊数A͂为L-R型模糊数。
如图2所示,工程中,模糊数隶属度为1的数通常只取一点,因此可用三元组(m,α,β)表示L-R型模糊数。m对应隶属度为1的数,也称为模糊数的均值;α,β称为模糊数的左、右分布。L-R型模糊数的L(x)、R(x)称为模糊数的左、右参照函数。
对于两个L-R模糊数M͂和N͂的扩展运算,可以采用下述快速计算公式[10]。
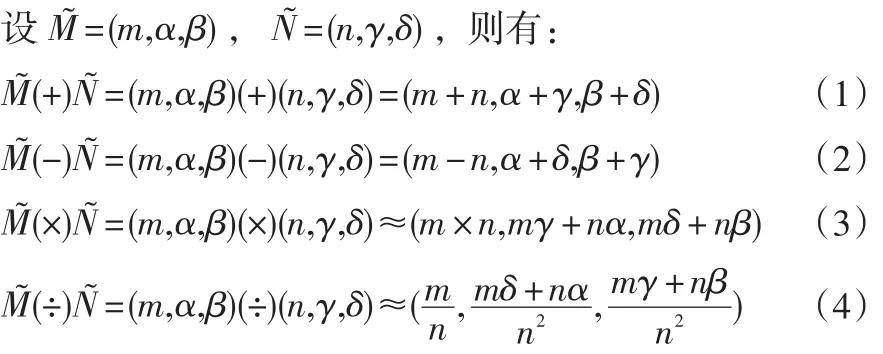

图2 线性模糊数Fig.2 Liner fuzzy number
3 模糊GO可靠性分析方法
传统GO法将事件发生的概率处理为一个确定值,然而由于系统复杂以及受环境变化等的影响,事件发生的概率往往具有不确定性。因此引入模糊数学,将事件发生的概率用模糊数表示,能够较好地处理事件发生概率的不确定性。模糊GO法的可靠性分析过程如图3所示。步骤如下:
(1)首先分析系统的结构原理,根据系统单元特性和各单元之间的逻辑关系,确定单元操作符类型;
(2)用信号流连接各操作符,构建系统GO图;
(3)确定所有单元的状态模糊概率,从输入信号开始,到输出信号结束,依次输入模糊概率数据;
(4)按照各操作符计算公式,计算各信号流的概率;
(5)最后得到系统的可靠性特征量,并以此为依据,对系统进行可靠性评价。

图3 模糊GO法分析过程Fig.3 Fuzzy GOmethod analysis process
4 飞机主动侧杆系统可靠性分析
4.1 飞机主动侧杆的GO图建模
根据系统中各部件的功能及GO法中各个操作符的特点,将飞机主动侧杆原理图1翻译成GO图,如图4所示。将图4中所有元件与GO法操作符的对应关系列于表1中。

图4 飞机主动侧杆系统GO图Fig.4 GOfigureof activesidestick
表1中,状态值0、状态值1、状态值2分别表示该部件处于提前状态、成功状态和故障状态。Pj(0)、Pj(1)、Pj(2)分别表示部件j处于提前状态、成功状态和故障状态的概率。

表1 飞机主动侧杆系统操作符数据Table1 Operator dataof activesidestick
4.2 GO法的定量计算
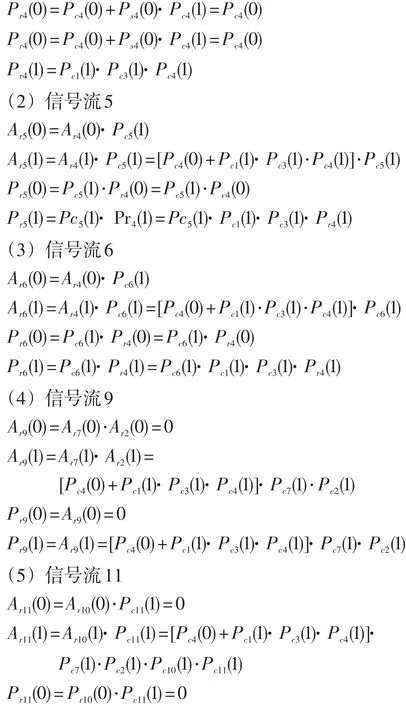
根据信号流状态累积概率算法对图4进行GO法计算,其中关键信号流的表达式如下。
(1)信号流4


式(5)即为飞机主动侧杆系统成功运行的概率。因为该式中包含有共有信号,而包含共有信号的信号流不是完全独立的,所以需要进行修正[12]。本文采用降阶修正的方法对算式结果进行修正。
4.3 FTA法分析飞机主动侧杆可靠性
FTA分析方法是一种自上而下的失效分析方法,以主动侧杆系统故障作为顶事件,建立故障树如图5所示,由故障树顶事件的计算方法可得:

其中,λi表示事件i发生的概率,即事件i的失效率[13]。式(6)为飞机主动侧杆的故障率,即侧杆成功工作的概率为:

式(7)结果表明:飞机主动侧杆的成功概率与系统中各个部件的成功概率成正比。传统GO法的计算结果与故障树计算结果的差值为:

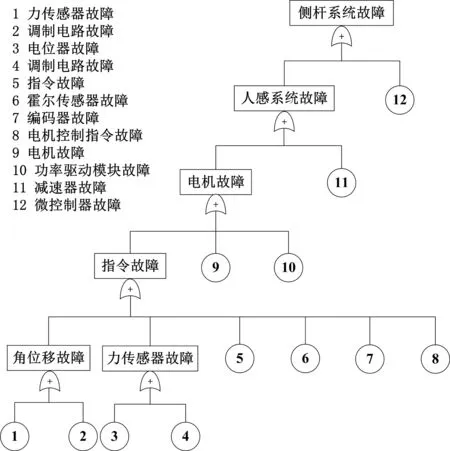
图5 飞机主动侧杆系统故障树Fig.5 Fault tree of activesidestick
5 飞机主动侧杆系统可靠性评价
将表1中各操作符的模糊数据代入式(5)中,并运用三角模糊数计算公式(1)~(4),采用模糊GO法计算得到飞机主动侧杆系统的可靠度为(0.958757,0.013036,0.010832),传统GO法的可靠度为0.958757,FTA法的可靠度为0.951661。
将截集定理应用在模糊GO法中[14]。设P͂为论域上的模糊集,对于任意λ∈[0,1],则:

表2 不同置信水平下的置信区间Table 2 Confidenceintervalsat different confidencelevels

P͂λ为 P͂的λ截集,称λ为置信水平,其表达式为fffff9=[m-α+λα,m+β-λβ]。表2为不同的置信水平下的 P͂λ的置信区间。
由表2可以得出:
当λ取1时,模糊GO法的可靠度计算结果和传统GO法的结果相同,这表示置信水平为1时,模糊GO法的计算结果为精确值。
GO法的计算结果和FTA法的结算结果有差异。因FTA法只考虑各部件的成功和故障两种状态,不能很好地处理如力矩电机的提前状态。GO法可以弥补FTA法的缺陷,处理系统的多状态问题。
通过对比模糊GO法、传统GO法和FTA法的结果,发现三者的结果相差很小,几乎可以忽略不计,从而验证了模糊GO法在飞机主动侧杆系统可靠性分析中的可行性与正确性。
6 结论
通过将模糊理论与GO法进行结合,可以解决系统各部件事件发生概率的不确定性。用模糊数对系统部件的状态概率值进行描述,表达了环境的模糊性和数据的不确定性,能够更加准确地分析系统的可靠性。
GO模型可表征系统的多状态问题,如可表示力矩电机的提前状态等,相对于FTA法考虑问题更为全面合理。
针对飞机主动侧杆系统结构复杂和不确定性特点,以模糊数学和GO法为理论基础,构建飞机主动杆系统的模糊GO模型,提出了一种基于模糊GO法的飞机主动侧杆可靠性分析方法,分析结果可为飞机主动侧杆系统的运行和改进提供参考依据。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:30
上海质量(2019年8期)2019-11-16 08:47:46
电子制作(2018年11期)2018-08-04 03:25:44
电子制作(2017年2期)2017-05-17 03:55:06
制造业自动化(2017年2期)2017-03-20 14:26:18
光学精密工程(2016年6期)2016-11-07 09:08:02
装备制造技术(2016年7期)2016-09-26 09:21:36
制造技术与机床(2016年3期)2016-08-31 04:02:37
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33
小朋友·快乐手工(2015年3期)2015-04-10 00:26:12