影像中心服务型机器人的技术发展和临床应用前景
2018-12-06 07:11付玏李克
中国医学计算机成像杂志 2018年5期
付 玏 李 克
随着科学技术的不断发展,人们已经愈来愈深切的感受到机器人技术深入生产、生活和社会的坚实步伐。服务机器人作为机器人的一个重要分支,正逐渐融入到包括医疗、教育、娱乐、保洁、导游、安保等多个领域,在不断地改变着人们的生活方式,并提高着人们生活的水平和质量。国际上对服务机器人的定义如下[1]:服务机器人是一种半自主或全自主工作的机器人,能够完成对人类和设备有用的服务,但生产操作除外。在医疗产业中,服务机器人将更加广泛地代替医务人员从事各种服务性工作, 使医务人员从繁重的、重复单调的、有害健康和危险的工作环境中解放出来[2]。本文对服务机器人技术在医学影像中心应用的研究现状及其未来发展进行了综述。
医疗服务型机器人的国内外研究现状
国外在服务机器人研究方面起步较早,例如,1982年荷兰人研制的一个装在茶托上,并且能够完成喂饭和翻书的实验用机械手。美国运输研究协会于1990年推出的“护士助手”服务机器人。日本的服务机器人技术目前一直处在世界领先地位, 这跟日本浓厚机器人的文化和人口的老龄化趋势严重有关。2006年日本三菱公司研发出了具有安全、漂亮的外形“RI-MAN”机器人(图1A),为方便照顾老人和体弱多病者,减少护工的工作量,研发人员还为该服务机器人设置了视觉、听觉和嗅觉等传感器,为了达到使用者感觉更为舒适、自然的目的,并且在机器人与病人接触的地方包裹有软面的触觉传感器,它可检测到压力的大小和分布位置,也更好地控制机器人双臂。在当年,“RI-MAN”机器人的成功发明标志着护理移动机器人的一大进步,为今后的抱取服务型护理机器人的进一步研发奠定了基础[3]。2010年,日本在“RI-MAN”的基础上,又研制出用途范围更广的护理服务移动机器人“RIBA”,如图1B所示“RIBA”采用了图1C的结构,机器人链路的长度、可移动关节的范围和关节的配置几乎都是经过计算机模拟抱人的数据和基于上一代机器人的经验结合得到的。研发人员采用了耦合驱动器机制,虽然护理机器人的肩膀属于轻瘦型,但它可承受起比较大的负荷,“RIBA”护理服务移动机器人同样具备语音识别和脸部识别能力,它也能根据定位声音源去寻找病人,也配有和“RI-MAN”相似的触觉传感器,但研发人员为了保证接触时的安全性和稳定性,研制人员还增加了“RIBA”和病人的接触面积,机器人整个身体关节都包裹着聚氨醋泡沫和珪胶弹性体等柔软的材料,研发人员要考虑主要的应用对象是老弱病残之人,纯机械的外观容易对他们造成伤害,再者人类对审美即外观有着一定要求,更加重要的是“RIBA”机器人采用了触觉指导传感器,通过指示、指引达到病人的位置、方向,触觉传感器覆盖于“RIBA”机器人全身各个地方,借助于触觉传感器,“RIBA”机器人已经可实现对病人完成对自身姿态的调整以及托起动作。姿态形成模式、车体控制模式和运动调节是目前“RIBA”机器人的三种触觉工作模式,可通过声音完成这三种模式切换、结合,“RIBA”机器人能够成功完成从一个位置到另一个位置,比如从床上抱起病人,再将病人放到床上,再把病人放在轮椅上这类抱起的动作。
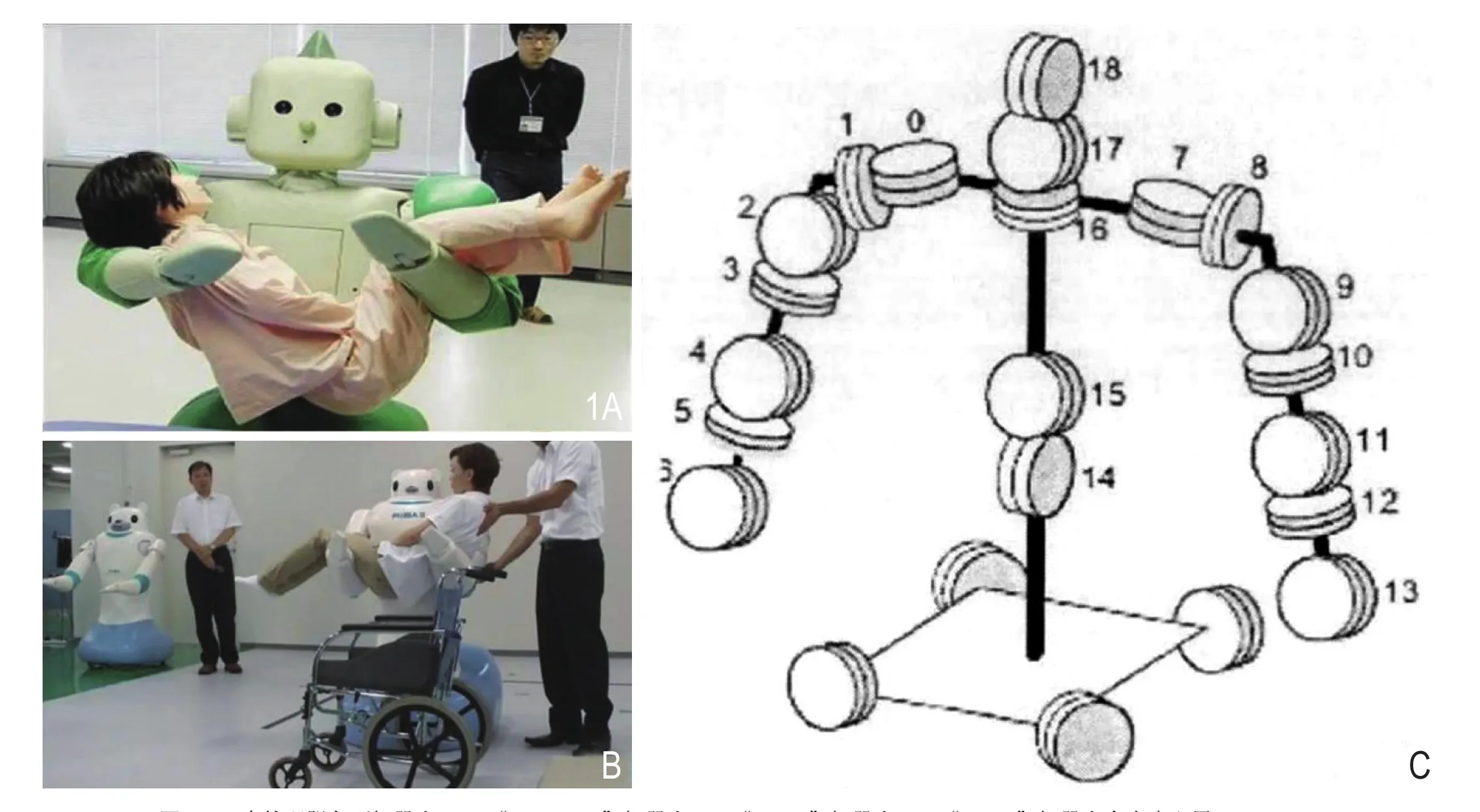
图1 日本护理服务型机器人。A.“RI-MAN”机器人;B.“RIBA”机器人;C.“RIBA”机器人自由度配置。
国内在服务机器人研发方面也做了大量工作,并取得一定成绩。例如,清华、北航和海军总医院联合研发了能够进行脑外科手术的机器人;哈尔滨工业大学机器人研究所研制了一种双臂作业型智能服务机器人,该机器人能够自动行走,具备一定路径规划和环境信息探测的能力,可用于危险环境中的作业;东南大学的赵真明提出一种基于加权A*算法的服务型机器人路径规划方法[4],优化了A*算法的路径轨迹,在计算时间上优于Dijkstra算法,能够满足实时性要求;哈尔滨工程大学的张立勋等人提出一种六连杆助行康复机器人机构模型,并在机器人动力学分析的基础上设计了一种具有抗干扰性能的鲁棒控制器[5],该控制器具有较强的稳定性,能够满足患者对助行训练安全性的要求;东南大学的潘礼正等人针对上肢辅助康复机器人临床使用中的安全性和平稳性问题,提出基于模糊逻辑的实时在线安全监测控制方法[6],该方法能够有效地实现康复机器人的安全性和平稳性。
服务型机器人在医学影像中心的应用
医学独立影像中心是通过X 射线、CT、磁共振(MRI)、超声等现代成像技术,对人体进行疾病检查,并结合病史、临床症状、体征及其他辅助检查,综合分析,出具影像诊断意见的社会医疗机构,不包括医疗机构内设的医学影像诊断部门。医学影像中心在欧美起步较早,发展较快,在我国还处于刚起步阶段。独立影像中心的运营,能够更为灵活或者更为及时地安排检查时间,方便部分特殊病患的需求;同时一定区域内影像中心的存在,可以实现资源共享,则该区域内其他医疗机构不需要自行购买大型设备,避免了重复建设的浪费。同时,独立影像中心通过分流医疗专家和远程会诊等手段,达到分流患者的目的,缓解大医院“看病难”的现状。
医学影像中心作为一个新兴的特殊医疗机构,服务型机器人在检查前,检查中,检查后都有着距离的临床应用前景
1.影像检查前
影像中心服务型机器人必须具备高度智能特点。在检查前能够自主迎宾、带路功能,当客人出现在大厅门口,机器人能够主动上前迎接,做出欢迎行为,并可带领客人前位指定位置。甚至可通过预约码或者人脸识别系统,在机器人上进行check in,自动将信息录入影像中心的客户管理系统(customer relationship management,CRM),并基于该系统,能够识别相应客人,引导客人完成相应流程。在客人等待的过程中,机器人具有丰富的知识量,能和客人互动聊天,可图文并茂地为客人讲解健康知识点。
2.影像检查中
医疗影像中心服务移动机器人直接服务对象是前来就诊检查的病人,这类人的身体状况更容易遭受伤害,因此安全性是对该服务移动机器人提出的最高要求,也是最基础的要求。机器人能够帮助移动行动不便的客人,如上下检查床。同时在放射性检查这一特殊环境中,机器人还能够在辐射区陪伴客人,完成提醒、安慰、远程视频等行为,如在操作开始之前,机器人能够针对特定人群(如幼儿),完成特定性的安慰对话。机器人内置AID设备,可第一时间提供紧急援助。
3. 影像检查完成后
检查完成后,机器人能够对客人进行问卷回访,收集客人满意度。检查报告客人可通过机器人查阅,针对专业名词进行最基础的报告解读。待工作人员发出指令后,机器人能指引客人前往大厅,做出送别行为。
4.影像中心工作人员对机器人的应用
当影像中心发生危险时(陌生人入侵,火情等),机器人能够通过传感器及时灵敏发现并发生警报,主动联系相应负责人。非营业期间,工作人员可通过手机连接机器人,远程巡视诊所。机器人可携带物品,将物品送到指定位置。机器人和诊所内电器设备相连,每天早晚可自主开关灯,空调等设备。机器人能够为医生安排日程,提醒事物,查文献,翻译专业期刊综述报道,记录病例,调阅电子影像等。
综上所述,目前服务型机器人在影像中心的应用还处于一片蓝海。在今后,为了满足医疗服务型机器人复杂环境下的适应性、可靠性,医疗机器人将朝着智能化、自主化方向发展。同时,随着全球老龄化人口的增加,医疗服务机器人的需求也在不断增加,这也为服务型医疗机器人在医疗领域的发展提供了更广阔的市场空间和发展机遇。
猜你喜欢
中国医学影像学杂志(2022年9期)2022-10-15
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
中国药学药品知识仓库(2022年8期)2022-05-09
现代仪器与医疗(2021年1期)2021-06-09
智慧健康(2021年33期)2021-03-16
中国煤炭工业(2019年5期)2019-11-04
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
信息化建设(2019年2期)2019-03-27