基于LoRa自组网的钢支撑应力监测系统设计
2018-11-21 04:39:46龚结龙
物联网技术 2018年11期
龚结龙
(中电海康集团有限公司,浙江 杭州 310012)
0 引 言
近些年国家各主要城市均在建设城市地铁工程,其安全质量一直是国家有关部门再三强调的主题。为确保施工过程的安全,目前大多数地铁基坑工程中的应力数据采集多采用局部测量、定时采集的方式。这类基坑在施工过程中,数据采集及分析具有局限性,监测效率低,需要间隔一定时间对一些钢梁进行抽查,实时性不高,测试误差也较大[1]。如何准确地将钢支撑受力数据进行实时采集,供相关人员参考分析、提前预警、降低工程风险,避免发生重大工程事故是一个亟待解决的课题。
钢支撑应力监测系统应运而生。地铁钢支撑应力监测系统由监控中心服务器、WSN(无线传感器网络)主控制器、WSN路由器、WSN采集器以及应力传感器(振弦式反力计)组成,其核心是基于自主知识产权的WSN协议栈搭建的无线传感器网络[2]。本文主要介绍无线传感网设计及其硬件设备的开发,监控中心服务器上位机部分在该项目中不做细致阐述。无线传感器网络由WSN主控制器、WSN路由器以及WSN采集器构成,具有自组织、自维护功能。系统整体结构如图1所示。
WSN采集器将采集到的监测点应力数据、电池电量以及温度等通过无线传感器网络上传到WSN主控制器,并由主控制器汇总后采用以太网或GPRS网络上传到上位机客户端软件,写入数据库。Web服务器向用户提供数据显示、报表、统计等功能,实现对钢支撑应力的实时监测和预警。
1 总体设计
1.1 WSN基础平台方案
根据无线传感器网络的特征,结合开放系统互联基本参 考 模 型(Open Systems Interconnection Reference Model,OSI)的7层协议栈模型和TCP/IP的4层协议栈模型,同时根据市场和应用的实际需求对WSN协议栈进行设计[3]。考虑到WSN的计算资源和存储资源十分有限,且通常数据传输率不高,因此不设计传输层,仅将该协议栈划分为4层。协议栈体系结构如图2所示。

图1 系统整体结构图
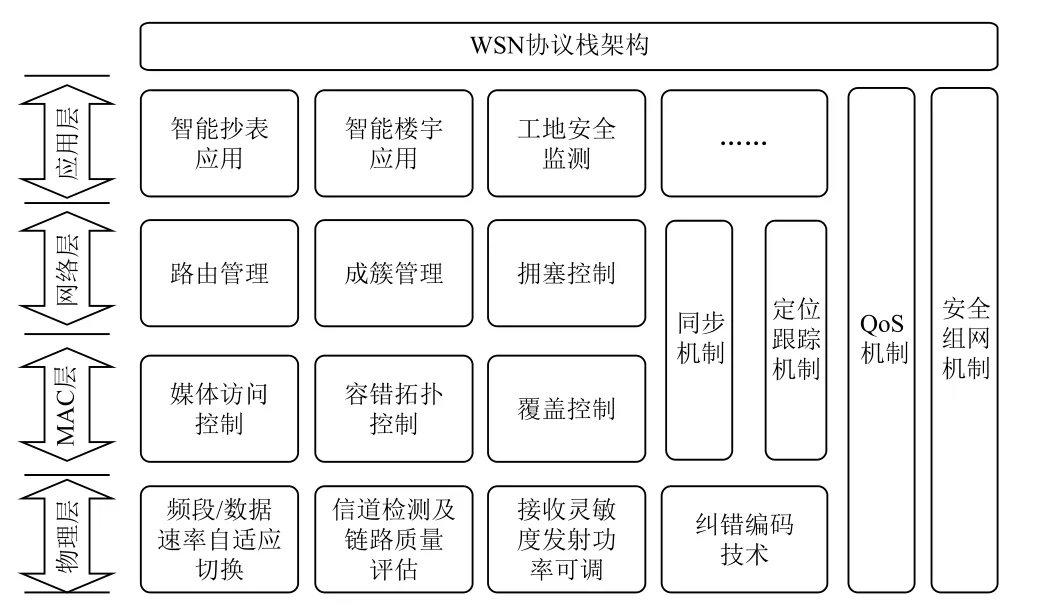
图2 WSN协议栈体系结构
WSN协议栈采用分层结构:
(1)物理层(Physical Layer,PHY):提供简单且健壮的信号调制解调、加解密、自适应频段切换和无线收发技术。
(2)媒体访问控制层(Medium Access Control Layer,MAC):负责数据成帧、帧检测、媒体访问控制。
(3)网络层(Network Layer,NWK):具有自组网、自维护、网络管理、安全管理和网络互联等功能。
(4)应用层(Application Layer,APL):提供面向用户的各种应用服务[4]。
1.2 关键点分析
关键点包括节点低功耗处理,节点上报采集点信息时的免碰撞机制以及时隙计算机制。节点路由选择将策略优化、时隙分配机制、时钟同步机制、节点加网机制与低功耗处理流程相结合[5]。
1.3 组网设计
本文以某地铁钢支撑应力监测项目需求为例,从用户方提出的钢支撑应力监测系统监测范围以及节点个数出发,设计系统最大路由深度为5,最大子节点个数为100,最大路由个数为10,可完全满足设计要求。路由器组网采用目前的组网方式,采集器组网需要增加低功耗处理机制。采集器组网应设定组建周期(如1 s),以便估算采集器生命周期。采用当前处理机制实现网络拓扑维护以及链路检测机制,但维护中数据传输必须基于时隙。
1.4 同步机制实现
由于网络中实际接入的节点个数远远小于0xFFFF,如果以0xFFFF为系统中接入节点的个数划分时间片,会导致时间片划分过细,大量有效时间片无法被有效利用,而如果同一个父节点下连续时间片相对较多,会使得同步机制实现难度增大。本方案中考虑采用实际接入节点划分时间片。假设系统中实际接入节点个数为100,则将发送周期定为20 min,其中竞争周期定为10 min,同步周期定为10 min(上述周期定义可以根据实际测试结构分配)。因此,时间片为10×60 s/100=6 s。
按照同步误差为2 s计算时,能够加入的子节点个数为10×60/2=300个,满足设计要求。
系统中所有同步均是分级同步,即子节点通过父节点时钟实现同步。同步数据帧采用直接发送与中断直接处理相结合的方式实现。同步机制实现与应用层对等,但采用跨层直接处理方式。采集器节点同步时间定义在数据帧上传到父节点后立即等待同步数据帧,因此路由节点的同步必须在同步周期前完成。
划分时间片时,路由节点时间片定义在同步周期的开始阶段。路由器同步周期内主要实现链路检测和时钟同步。主控在时间片内主要在单跳范围内发送时钟同步命令帧,用于其子路由节点的时间同步(同步备份)。
根据系统实际运行特点,将系统周期定义为同步周期和竞争周期,用Tsys表示,单位为s。由于系统中采用实时时钟表征系统运行时间,且最小单位为s,因此定义系统周期最小单位亦为s。例如:若系统周期Tsys定义为20 min,则系统周期起始时刻定义为**小时00分00秒、**小时20分00秒以及**小时40分00秒。
在同步周期中,每个节点均有一个时间片来传输有效数据,且同步周期按照时间片的先后顺序,划分为主控制器时隙、路由器时隙和采集器时隙。
同步周期中时间片划分方式:当前的无线能耗监测系统中,主控制器端需要保存每一个节点设备(包括路由器、采集器)信息,且主控制器端需维护一张节点设备信息表,该表被保存在主控制器RAM中(资源充足时),同时也在非易失性存储器(E2PROM,FLASH)中备份。采用该设备信息表中的位置号作为每一个节点的时间片序号。在系统中,该时间片序号是唯一的,且有效位置可以通过算法控制为连续状态。
上述时间片序号设置的特点如下:
(1)灵活:每一个设备新加入网络后,均可由主控受理一个时间片序号,同时表征该设备在设备表中的位置。
(2)分配便捷,具有唯一性。
在子节点时隙中,由子节点首先发送数据信息给父节点,然后等待设定接收窗口时间接收时钟同步信息以及和父节点处理应急事务。
1.5 系统周期实现
在钢支撑应力监测系统中,系统周期处理策略最为重要,其定义如图3所示。

图3 系统周期
系统周期表示系统中所有设备在时间轴上周期性的工作模式。系统周期可划分为竞争周期和同步周期。
竞争周期:系统中所有节点均可在竞争周期中采用CCA机制进行通信。目前在竞争周期中主要传输采集器报警信息,以及采集器和路由器入网流程。
主控时隙功能:主控制器发送时钟同步命令帧以及参数修正命令帧等。该时隙由主控制器主动发送数据帧,网络中的其他节点均不能发送数据帧(没有同步的节点除外)。
路由器时隙:路由器收发数据时间片,用来进行时钟同步和链路检测及与主控制器之间的信息交互。
采集器时隙:该时隙用于采集器与其父节点以及主控制器通信。如果采集器已经加入网络并且与主控制器同步,则首先在该时隙内发送链路检测命令帧并完成链路检测。
节点启动后,获取系统周期相关参数。获取方式如下:
(1)若节点系统周期参数已配置完成,则直接以上述参数为准执行后续流程;
(2)若节点系统周期参数未完成配置,则采用默认系统周期参数为准执行后续流程。
为了系统周期实现方便及减少RF通信过程,本系统周期起始时间定义:系统周期起始时间定义为**时00分00秒,因此系统周期最好设计为单位小时内具有整数个完整的系统周期。采用上述定义方式后,节点就可以通过RTC时间计算系统周期起始时间。
1.6 时隙处理流程
节点在时隙内主要完成如下工作:
(1)数据采集及上报(直接向主控制器发送);
(2)节点与父节点时钟同步;
(3)节点信息主动上报(可选);
(4)计算唤醒时间并进入低功耗模式。
采集器节点在时隙内处理流程如图4所示。

图4 时隙处理流程
1.7 上位机与主控制器时钟同步处理流程
上位机每半小时对主控制器时钟进行一次同步,启动时钟同步流程时间最好以系统时间为准(即定义**时00分 **时30分进行校时),不以运行时间为准,且上位机客户端启动并与主控制器连接成功后,将立即执行时钟同步流程,并输出校时成功信息以便调试。上位机与主控制器同步处理过程如图5所示。
1.8 速率自适应机制
本文的RF传输技术采用LoRa。LoRa是美国Semtech公司采用和推广的一种基于扩频技术的超远距离无线传输方案,这种传输方案改变了以往关于传输距离与功耗的折衷考虑方式,提供了一种能实现远距离、长电池寿命、大容量的系统,进而可扩展传感网络[6-7]。

图5 上位机与主控制器同步处理
LoRa技术支持SF7~SF12共6种速率的LoRa信号,当节点连续入网但接收不到回复时,将主动调节扩频因子SF为其他值,然后再次发送入网请求/传输数据,直到调整到一个收发准确率较高的数据传输速率为止。
2 系统设计
2.1 RF模块
RF模块分为网关RF模块和节点RF模块。
网关RF芯片采用Semtech公司设计生产的基于LoRa调制的基带芯片SX1301,它的目标是为广域范围的众多无线节点提供健壮的星型基站。SX1301有一些关键的技术特征,包括高达-142.5 dBm的接收灵敏度、49个LoRa“虚拟”通道和ADR技术。IF0~IF7的LoRa通道带宽固定为125 kHz,每个通道都可以设置中心频率,接收SF7~SF12共6种速率的LoRa信号[8]。
节点中所用的RF主芯片为SX1276/SX1278,该芯片相比SX1301,只支持一个SF通道。通常用于超长距离扩频通信的节点设计,抗干扰能力强,能够最大限度地降低电流损耗[9]。
2.2 主控制器设计
WSN协调器负责其管理范围内的WSN路由器以及WSN采集器的组织和维护,负责应力传感器数据汇总,并提供移动接入(GPRS,CDMA,WCDMA)等接口,将WSN采集器采集的监测点数据信息上传到监控中心服务器。
主控制器选用TI公司设计生产的以AM335x为核心处理器的ARM Cortex-A8平台[10],外加以太网接口和3G模块构成上行链路,通过上行链路,主控制器可接入互联网;主芯片与RF芯片SX1301采用SPI接口通信,作为下行链路,与网络中的路由器通信,该部分中的实时时钟作为通信中的时钟同步使用,借助E2PROM存储参数信息。协调器结构如图6所示。
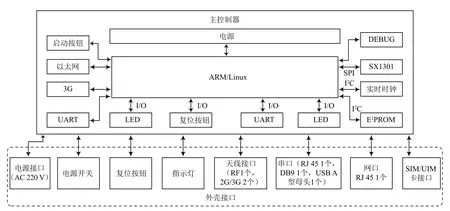
图6 协调器结构框图
2.3 路由器设计
WSN路由器负责无线数据帧路由转发。根据该系统的实际应用环境及范围,采用不同数目的WSN路由器组建WSN基干网,负责WSN协调器与WSN采集器之间的数据交互。由WSN路由器组建的WSN基干网覆盖了该子网中的所有WSN采集器,并提供自维护、自修复的通信链路。
路由器采用Semtech公司设计生产的STM32L051x作为核心处理器,与RF芯片SX1301通过SPI连接,与网络中的上、下层设备通信。实时时钟做通信中的时钟同步之用,E2PROM用来存储一些重要信息。同时还预留有复位按键、串行通信口、LED指示灯等交换接口。市电经AC-DC模块转换成所需电压后为路由器供电,其框架如图7所示。

图7 路由器框架图
2.4 采集器节点设计
WSN采集器负责与其连接的应力传感器的数据采集和上传,及该监测点应力数据分析以及报警状态指示。结构外壳与路由器相仿,不同之处在于采集器由于基坑内无法取电,只能依靠电池供电,且需要维持一定时间不能拆卸,因此低功耗设计是该部分需要重点考虑的问题。除了算法有差异,硬件也需要仔细设计评估。图8所示为采集器的实现框图,与路由器类似,采用1个STM32L051x单片机芯片作为主处理器[11],以SPI接口方式控制射频模块进行无线通信,辅以复位按钮、RTC时钟电路、E2PROM电路、温度采集电路、电池电量采集电路、电源管理电路、应力采集电路等。
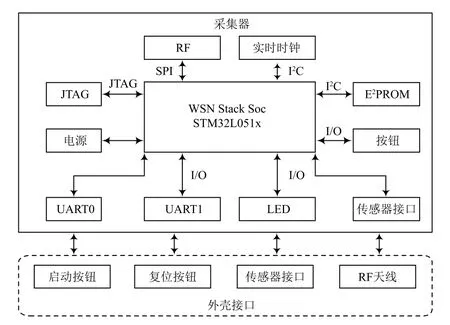
图8 采集器节点框图
3 系统使用
3.1 设备形态
本文所设计的集中器、路由器和采集器的节点外观如图9所示。
3.2 系统调试
主控制器与客户端软件的连接通过主控制器与客户端计算机的连接实现。连接方式包括以太连接、GPRS连接。当主控制器安装现场有以太接口时,推荐用户采用以太接口。上位机界面如图10所示。

图9 设备形态

图10 上位机显示
采集器节点、路由器和协调器工作后,会自动加入网络。入网后的拓扑图如图11所示。图中将显示已入网和未入网的设备。现场装置经过正确安装后,设备将全部正确入网。本文所设计的钢支撑应力监测系统应用在具体场景中时,整体系统的性能还取决于应力传感器的精度,这些数据的采集在此不作讨论。
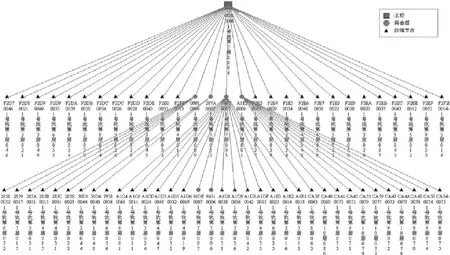
图11 网络拓扑显示设备入网情况
4 结 语
本文针对基坑安全施工要求,设计了基于LoRa自组网的应力监测系统。所设计的WSN协议栈具有组网快、鲁棒性强、稳定性好等特点,为相关工地安全作业提供了更好的保障。该系统具有良好的可移植性和扩展性,能够应用于其他相关物联网领域的项目中。
猜你喜欢
科教新报(2022年24期)2022-07-08 02:54:21
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
铁道通信信号(2018年9期)2018-11-10 03:26:46
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
舰船电子对抗(2016年3期)2016-12-13 05:15:55
广西大学学报(自然科学版)(2016年5期)2016-11-12 06:28:54
中国防伪报道(2015年4期)2015-12-27 00:52:35
计算机工程(2014年10期)2014-06-07 05:53:21
电子设计工程(2014年12期)2014-02-27 11:58:12