
基于ABB IRB120机器人的保温杯自动化装配检测平台设计与仿真
2018-11-20 09:29朱洪雷刘军锋程铠镔
机电信息 2018年33期
朱洪雷 刘军锋 代 慧 程铠镔
(1.广州工程技术职业学院,广东广州510925;2.中船重工昆船电子设备有限公司,云南昆明650236;3.广州番禺职业技术学院,广东广州511483)
0 引言
先进装备制造业是衡量一个国家或地区工业化程度和国际竞争力的重要标志,工业机器人技术是装备制造业转型升级的典型代表。“中国制造2025”明确指出,工业机器人将在工业转型升级中拥有不可或缺的地位,它将成为高端装备制造产业的重要组成部分。目前,工业机器人已广泛应用于焊接、装配、喷涂、切割、搬运、包装码垛等众多领域。
结合实际生产需求,本文基于ABB IRB120机器人设计了某型保温杯自动化装配检测平台。仿真验证显示,该系统能够有效提高产品质量和生产效率,具备良好的应用价值。
1 系统设计方案
根据生产节拍和要求,本设计采用三台ABBIRB120机器人协同工作的方案。利用IRB120机器人的紧凑性、灵活性与Smart组件通过工作站逻辑控制的IO端口形成相互的通信,使得机器人各系统与Smart组件之间、机器人系统与机器人系统之间的控制及时、准确,完成保温杯自动化装配并实现基本的检测功能。工作站系统结构框图如图1所示。

图1 工作站系统总体结构框图
2 多机协同工作站系统设计
2.1 机器人系统I/O分配表
多机协同工作站系统I/O复杂,I/O信号配置是否合理直接影响工作能否正常进行。本设计方案给出了相应的机器人系统I/O分配表,如表1所示。
2.2 工作站系统工作流程
保温杯自动化生产线启动后,1#~3#输送装置将保温杯杯体、杯盖、内胆部件传送至装置末端,传感器检测工件到位后,发送工件到位信号productInPos给1#Robot装配机器人。1#Robot装配机器人按照生产工艺流程和装配原则,将相应工件放置到装配工位。与此同时,2#Robot机器人完成相应的检测,以确保顺利完成产品装配和检测。产品组装完成后,4#输送装置启动,3#Robot将产品放置到指定区域。具体工作流程如图2所示。

表1 机器人系统I/O分配表
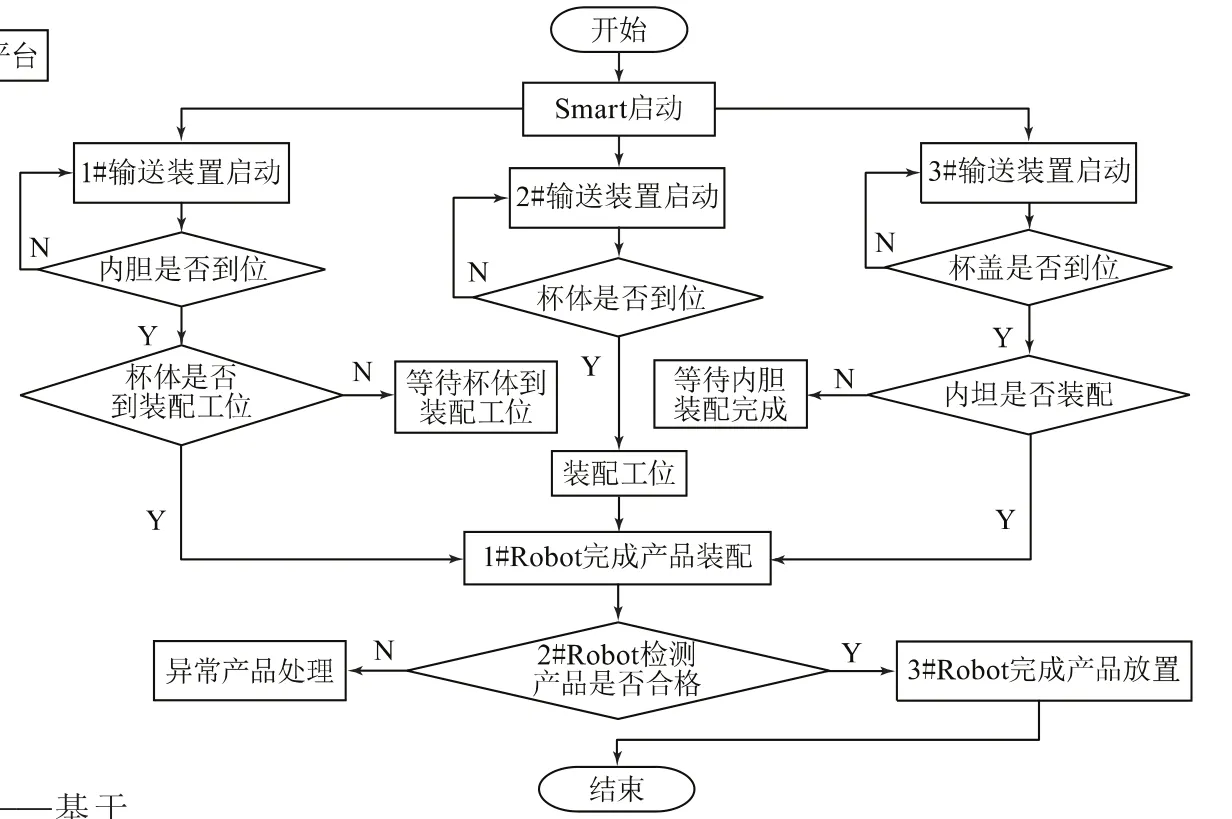
图2 工作站系统工作流程
3 系统仿真测试
系统采用ABB RobotStudio6.07软件进行仿真测试,如图3所示。测试结果显示,系统能够稳定运行,完成保温杯的自动化装配与检测。通过仿真验证,该平台能够有效提高生产效率,具有一定的应用和推广价值。

图3 保温杯自动化装配检测仿真系统
4 结语
机器人技术是装备制造业转型升级的典型代表,目前机器人已广泛应用于各行各业,有效提高了生产效率和产品质量。基于ABB IRB120机器人的保温杯自动化装配检测平台,能够实现产品的自动化生产,提高生产效率和产品质量,具有一定的经济和推广价值,可促进相关产业实现转型升级。
猜你喜欢
今日农业(2022年16期)2022-11-09
中国新时代 (2022年4期)2022-04-14
电脑报(2020年32期)2020-09-06
阅读(科学探秘)(2020年5期)2020-08-11
中国生殖健康(2019年12期)2019-01-07
——《行政科学论坛》杂志工作站挂牌运行
行政科学论坛(2016年7期)2016-10-25
科学启蒙(2016年3期)2016-03-23
财经界(学术版)(2015年19期)2015-12-23
天然气与石油(2015年1期)2015-02-28
土木建筑工程信息技术(2012年4期)2012-03-25
