
一种移动机器人用地埋式充电桩的研究
2018-11-20 09:28金郅涵
机电信息 2018年33期
金郅涵 缪 翼
(国网江苏省电力有限公司张家港市供电分公司,江苏苏州215600)
0 引言
移动机器人是一种具有自行组织、自主运行、自主规划能力的智能机器人,由于其良好的机动性、灵活性,移动机器人已经被广泛地应用到了各个行业。移动机器人采用电池供电,且电池容量有限,当其运行一段时间电量降低到一定程度后,需要寻找充电桩及时进行充电。现有机器人充电桩多设立在地面以上的充电室内,整体占地面积大,形象呆板,尤其是对于园林、景区等土地资源紧张,强调风景和谐、美观的场合不太适用。
本文介绍了一种地埋式自动升降充电桩,很好地解决了上述问题,不仅可实现移动机器人的能源补给,保护充电桩本体,还能节约土地资源、美化环境,具有良好的推广应用价值。
1 园林机器人概述
根据地形和设备实际情况,本项目园林机器人采用磁轨导航、射频识别定位方法实现其按照规定路径的自主移动及定位停靠。磁轨铺设在景观园林的人行道两边或园林内部,不会影响车辆和人员的正常通行,机器人只在工作时间沿着敷设的轨道移动,非工作时间和充电时间停留在固定舱位。在每个停靠点布置RFID识别模块,机器人根据任务需要可以在任意停靠点停靠使用,当需要充电时,机器人沿着定轨自主找到距离最近的充电桩充电。
2 地埋式充电桩的设计
2.1 充电桩结构设计
地埋式充电桩主要由地下坑道、电动平移盖板、充电桩本体、支撑台、螺杆升降机构、蜗杆传动机构、升降驱动电机、主控模块及无线模块组成,整体结构示意图如图1所示。地下坑道与电动平移盖板配合,容纳充电桩本体及升降装备,为整套系统遮风挡雨;支撑台固定于螺杆升降机构顶部,用于托载充电桩本体;主控模块及无线模块固定于地下坑道靠近顶端的内壁上;升降驱动电机是整个电动升降系统的驱动装置,通过蜗杆传动机构与螺杆升降机构相联。
图1(b)中,蜗杆传动机构上表面设有红外测距传感器,用于检测升降机构外筒竖直方向的直线位移,控制充电桩本体上升到合适高度。蜗杆传动机构上表面亦设有限位开关,当机器人充完电,升降机构外筒下降到初始位置时,控制模块发出指令,使电动平移盖板关闭。
螺杆升降机构内部结构如图2所示,机构主要包括螺杆、螺母及与螺母装配在一体的外筒,将回转运动变为直线运动,使得螺杆转动时,与螺母成为一体的外筒在竖直方向作升降运动。

图1 整体结构示意图
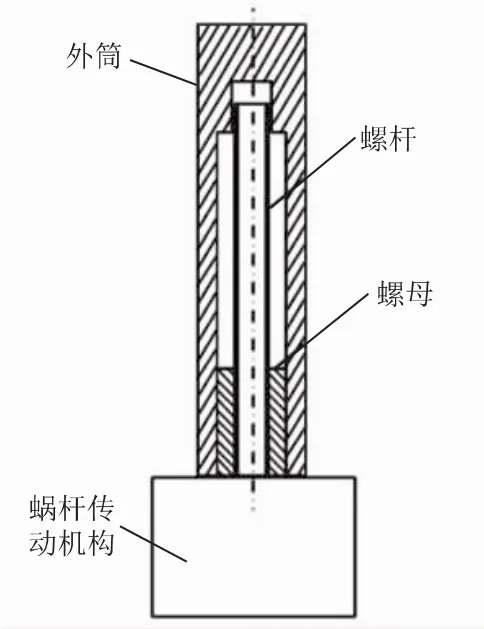
图2 螺杆升降机构剖面图
2.2 充电桩智能控制原理
地埋式充电桩的电路原理如图3所示,其中,主控模块是整个充电桩智能控制的核心,与无线模块进行双向交流,接收反映盖板及升降系统位置的限位开关及红外测距传感器的信号,控制电动平移盖板及螺杆升降机构电机的动作。

图3 地埋式充电桩电路原理图
充电桩附近设有RFID标签,当机器人需要充电、检测到该标签后,发射无线信号与地埋式充电桩进行无线通信,充电桩的无线模块接收到信号并将其发送给主控模块,主控模块控制电动平移盖板内部电机动作打开盖板。盖板打开到位后,电动平移盖板全开位置限位开关被触发,该信号传送给主控模块,主控模块给升降驱动电机的控制端一个动作信号,电机驱动螺杆升降机构动作,带动充电桩本体上升。当红外测距传感器检测到充电桩本体上升到合适高度后,发送信号给主控模块,进而主控模块输出信号给升降驱动电机的控制端,使电机停止转动;与此同时,主控模块通过无线模块与机器人通信,使其开始进行对接、充电。充电完成后,机器人充电机构脱离充电座,整套系统进行与上升过程相反的感应控制,使螺杆升降机构带动充电桩本体隐藏到地面以下。
地埋式充电桩的智能控制流程如图4所示。

图4 地埋式充电桩智能控制流程图
3 结语
本文提出了一种应用于移动机器人充电的地埋式充电桩,充电桩设置在电动升降系统上,通过电动平移盖板及升降系统的有序配合,可实现根据机器人的充电需求自动出现与消隐。该设计不仅可实现移动机器人的能源补给,保护充电桩本体,延长其使用寿命,还能节约园区土地资源,美化园区。将其与储能式机器人配合应用在智慧城市、能源小镇、景观园林、大型超市、商场中,将大大方便人们的生活与娱乐,因而具有良好的推广应用价值。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中小企业管理与科技(2022年6期)2022-06-14
建材发展导向(2022年1期)2022-03-08
纺织器材(2021年5期)2021-11-11
橡塑技术与装备(2018年20期)2018-10-20
橡塑技术与装备(2018年10期)2018-05-18
制造技术与机床(2017年3期)2017-06-23
纺织器材(2017年2期)2017-04-20
中国塑料(2014年1期)2014-10-17
压缩机技术(2014年3期)2014-02-28
