基于卷积神经网络的机场助航灯故障诊断
2018-11-19 10:58姜巍
软件导刊 2018年11期
姜 巍
(中国民航工程咨询公司,北京 100621)
0 引言
机场助航灯光系统是机场视觉导航系统中重要构成部分,对夜间与极端天气条件下飞机的起飞、着陆和滑行起着至关重要的作用。根据国际民航组织文件附件第14条对导航设备平均光照强度的要求,如果平均光照强度不符合要求,需及时更换灯泡。但目前助航灯故障检测主要采用人工目视检测方法,该方法存在准确度低及受主观影响较大等弊端。 因此本文提出一种基于卷积神经网络的助航灯故障诊断方法。
卷积神经网络是一种广泛应用于多个领域的深度神经网络,主要用于模式识别和图像分类。Ahmad等[1-2]将卷积神经网络应用于人脸识别;潘翔等[3]应用CNN 方法识别车牌字符,准确度为98.9%;邓柳和汪子杰[4]在车牌字符识别中应用卷积神经网络,识别准确率达到97.8%以上;周明非等[5]应用卷积神经网络对高分辨卫星图像进行分类,准确率为99.5%;江璐等[6]将CNN用于指纹纹型分类,准确度达到94.2%;朱锡祥、张晴晴、钟林等[7-9]将神经网络与深度CNN应用于语音识别。本文在助航灯故障诊断中引入卷积神经网络,以期实现对助航灯等光强图的自动诊断和分类。该过程无需人为提取输入图像特征,可克服潜在的人为因素影响,提高故障诊断准确性。
1 卷积神经网络
YanLecun等[10]于20世纪90年代末提出了卷积神经网络算法,并基于卷积神经网络算法设计了一套用于识别支票数字的手写数字识别系统。随后卷积神经网络模型逐渐扩展至其它领域,如物体检测、人体运动检测。卷积神经网络具有共享权值、旋转不变性等结构特性,使其能够从需要识别的图片中提取足够的图片特征,适用于图像识别与分类,但应用于复杂图像分类的效果并不理想,主要原因是硬件设备性能较差,导致神经网络训练异常缓慢,效率较低无法广泛应用。近年来,随着电子技术、电脑硬件水平的飞速发展,卷积网络也得到长足发展,且卷积神经网络在预处理过程中无须人工提取特征,从而避免了潜在的人为误差,提高了系统识别准确率。近年来,卷积神经网络被广泛应用于人脸识别[11-13]、字符识别[14-16]、图像分类[17-22]、语音识别[23-25]等领域。
1.1 卷积神经网络结构
卷积神经网络是一种多层监督学习神经网络,首层为输入层,中间层由交替成对出现的卷积层和池化层组成,层间提取的特征图像素值递减,但所含特征图递增,从而可提取详尽的图片特征信息;卷积神经网络后端的几层为传统全连接层,其功能与多层前馈神经网络类似。由卷积层和池化样层提取的特征图输入全连接层,并在多个非线性映射之后产生特征向量,最终送往输出层的分类器进行分类。目前,根据任务的不同,输出层分类器可以采用logistic回归、softmax回归,或是支持向量机等形式。图1为卷积神经网络拓扑结构。
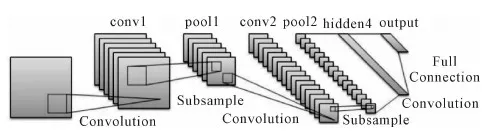
图1 卷积神经网络结构
1.2 卷积神经网络训练过程
卷积神经网络模型的训练过程可分为以下两个阶段:
第一阶段为前向传播:①神经网络训练前,初始化网络参数,对网络具体层数、卷积核大小、学习速率、迭代次数进行选择,并选择训练样本集和测试样本集;②将样本输入网络,对神经网络进行训练,得到相应的输出结果。
第二阶段为反向传播:①计算网络实际输出与理论输出的均方误差;②反向传播过程中,不断优化网络阈值参数,通过梯度下降法,调整权值矩阵,更新网络各节点权值和偏置,不断迭代直到达到预先设定的迭代次数。
1.3 卷积神经网络训练算法
卷积网络训练中的具体算法如下:
l表示神经网络中任意层,则该层输出为:
xl=f(il),il=klxl-1+bl
(1)
其中,il为l层(当前层)的输入,kl为l层特征图的权值,xl-1为上一层的输出,bl为当前层的额外偏置(也称基),f为神经网络激活函数,本文选用sigmoid函数作为网络激活函数。
对上一层输出的特征图进行卷积,通过激活函数,得到相应特征图。卷积层计算方式如式(2)所示。
(2)

在池化层中,对前一卷积层提取的特征图进行池化操作,池化后输出的特征图数量不变,计算方法为:
(3)
其中,用n表示卷积层和池化层间窗口大小,一般大小为2×2。Mj表示选择输入特征图的集合。
激活函数sigmoid的具体函数形式为:
(4)
将识别率的数值作为评价网络优良的标准,识别率计算公式为:
(5)
2 卷积神经网络模型结构设计
本文基于LeNet-5模型进行改进优化,具体改进方法包括:sigmoid函数较LeNet-5中双曲正切函数网络拟合更快,因此被采用为本文神经网络的激励函数。将原网络中的C5层删去,并将S4层采集的特征图直接输入全连接层,各层网络中神经元个数也相应改变,最终网络模型结构见图2。与原神经网络相比,改进后的网络中隐含层为5层。网络中神经元个数减少,训练参数大幅降低,从而网络拟合所需时间也相应减少。但改进后的神经网络仍具备图像位移、缩放不变性和良好鲁棒性等优点。
该网络结构中,输入层的输入为大小28×28的光强图,其后为交替出现的卷积、池化层。图中C1为卷积层,该层有6个大小为5×5的卷积核,对输入图像卷积后得到大小6张大小为24×24的特征图。卷积得到的特征图即为S2层(即池化层)的输入,池化后特征图个数不变,但输出的特征图大小为输入的1/4。C3是第2个卷积层,S4是第2个池化层,最后与F5层以全连接的方式相连得到网络输出,输出层中4个神经元分别对应助航灯4种状态。改进后的神经网络模型共有32 194个参数,在LeNet-5模型60 000个参数的基础上减少了46%。

图2 卷积网络结构
3 实验结果及分析
3.1 实验数据
本文选择正常、老化、灯丝熔断、损坏的助航灯等光强图作为训练和测试集样本,样本总数为7 000,图像为RGB颜色模式。选取样本集中20%的等光强图作为测试样本,其余作为训练样本。将样本集中等光强图随机输入神经网络中,对网络进行训练。助航灯等光强图部分样本如图3所示。

图3 等光强图样本示例
3.2 实验结果分析
为保证实验客观性及严谨性,将实验中采集的图像打乱顺序后随机输入神经网络中,对模型进行训练和测试。网络多次迭代后,得到神经网络的训练、测试准确率及误差损失函数loss值,作为评价神经网络模型优劣的标准。
在对神经网络训练前,将神经网络学习速率设置为0.01,总迭代次数设置为100。对采集的助航灯等光强图集打乱顺序,并选取其中的20%作为测试神经网的图片集。用识别准确的张数/测试集总张数计算卷积网络的测试准确率。实验结果如图4和图5所示。
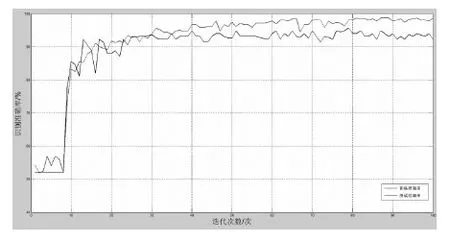
图4 神经网络识别准确率随迭代次数变化趋势
在上图中红色为训练准确率变化曲线,蓝色为测试准确定率变化曲线。如图4所示,网络的训练准确率最大值为98.70%,测试准确率最大值为94.84%。可以看出神经网络的训练准确率和测试准确率随着网络迭代次数的增加逐渐升高,说明该神经网络结构的选择及设计合理,卷积核大小及移动步速、学习速率等参数正确。测试识别率最高为94.84%,说明网络对图像的特征提取较准确,基本能够满足机场助航灯故障诊断。

图5 神经网络损失函数loss随迭代次数变化趋势
图5中的红线为训练损失函数变化曲线,蓝线为测试损失函数变化曲线,随着迭代次数的增加,训练损失函数和测试损失函数先逐渐减少,随后训练损失函数逐渐稳定,而测试损失函数在测试准确率达到94.84%后开始波动。结合测试准确率图像分析,测试准确率在卷积网络迭代到第80次时达到峰值,为94.84%,而后准确率下降,说明此时神经网络训练完成。
实验结果表明:深度卷积神经网络在助航灯故障诊断方面具有一定的实用价值,可作为助航灯故障诊断技术参考。本次实验只选取了一种网络结构进行实验分析,未来可考虑增加隐含层数或改变卷积核大小等参数进行实验,研究各参数变化对网络识别准确率的影响。
4 结语
本文将深度卷积神经网络应用于助航灯故障诊断,将助航灯等光强图片输入到神经网络中对网络进行训练。该过程由卷积网络自动提取特征,消除了人为提取特征时可能存在的误差,训练后的神经网络识别准确率达到94.84%,说明基于卷积神经网络的助航灯故障诊断方法具有一定实用性。
基于LeNet-5模型结构对卷积网络层数结构等参数进行选择,构建用于助航灯故障诊断的卷积网络结构。实验结果中的误差可能是助航灯图片数较少所致。因此,在下一步研究中会增加助航灯等光强图的数量,以期获得更好的识别诊断效果。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
医学食疗与健康(2021年27期)2021-05-13
电子制作(2019年11期)2019-07-04
中国交通信息化(2018年5期)2018-08-21
北京航空航天大学学报(2018年1期)2018-04-20
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
电视技术(2014年19期)2014-03-11
振动、测试与诊断(2014年5期)2014-03-01
机械与电子(2014年1期)2014-02-28
河南科技(2014年3期)2014-02-27