
机器视觉在工业机器人智能分拣识别中的研究
2018-11-08 02:32耿立明王迪杨威
电子制作 2018年20期
耿立明,王迪,杨威
(沈阳城市建设学院信息与控制工程系,辽宁沈阳,110167)
0 引言
机器视觉主要研究用计算机来模拟人的视觉功能从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。一个典型的工业机器视觉应用系统包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块,如图1所示。首先,采用CCD摄像机或其它图像拍摄装置将目标转换成图像信号,然后转变成数字化信号传送给专用的图像处理系统,根据像素分布、亮度和颜色等信息,进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出判断结果[1]。
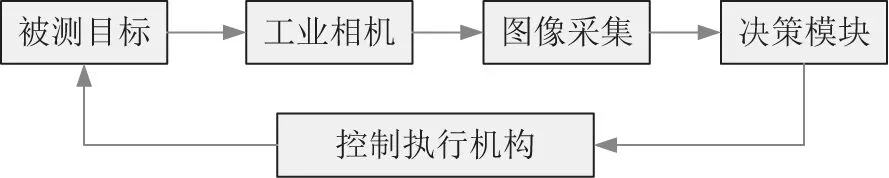
图1 工业视觉系统结构图
机器视觉在工业机器人中的应用是一项综合技术,检测精度更高,系统操作更为简单,能够适应工业生产中恶劣的环境,有合理的性价比,有通用的工业接口,能够由普通工作来操作,有较高的容错能力和安全性,不会破坏工业产品,有较强的通用性和可移植性。其中包括数字图像处理技术、机械工程技术、控制技术、光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。这些技术在机器视觉中是并列关系,相互协调应用才能构成一个成功的工业机器视觉应用系统[2]。
目前,机器视觉已成功地应用于工业领域,大幅度地提高了产品的质量和可靠性,保证了生产的速度。例如产品包装印刷质量的检测、饮料行业的容器质量检测、半导体集成块封装质量检测等。在制药生产线上,使用机器视觉技术可以对药品包装进行检测,以确定是否装入正确的药粒。
1 机器视觉在工业机器人智能分拣识别中的关键实用技术
■1.1 工业相机
利用工业摄像机进行视觉定位的原理,设计视觉定位方法获取分拣工作平面上工件的物理位置。针对智能机器分拣环节,将机器视觉技术运用于工业机器人,使机器人确定目标物料的位置,基于图像传感技术设计视觉识别、定位方法,获得作业基准线和目标信息,完成相对定位[3]。
目前CCD 摄像机以其小巧、可靠、清晰度高等特点在商用与工业领域都得到了广泛地使用。CCD摄像机按照其使用的CCD器件可以分为线阵式和面阵式两大类。线阵CCD 摄像机一次只能获得图像的一行信息,被拍摄的物体必须以直线形式从摄像机前移过,才能获得完整的图像。它主要用于检测条状、筒状产品,例如布匹、钢板、纸张等。摄像机可以一次获得整幅图像的信息。
图像传感器的标定及视觉定位,设计视觉定位方法获取分拣工作平面上工件的物理位置。
■1.2 图像采集及处理设备
机器视觉系统中,图像采集卡是控制摄像机拍照,完成图像采集与数字化,协调整个系统的重要设备。它一般具有图像信号的接收与A/D 转换模块,负责图像信号的放大与数字化,满足高速数据传输的多种应用[4][5]。
采用视觉传感器的模块化部件,更适合工业需求。这种视觉传感器集成了光源、 摄像头、图像处理器、标准的控制与通讯接口,自成为一个智能图像采集与处理单元,内部程序存储器可存储图像处理算法,并能使用PC机,利用专用组态软件编制各种算法下载到视觉传感器的程序存储器中。视觉传感器将 PC 的灵活性,PLC 的可靠性、分布式网络技术结合在一起。用这样的视觉传感器和 PLC 可以更容易地构成机器视觉系统[6]。

图2 视觉传感器
2 机器视觉在工业机器人智能分拣识别中的关键研究内容
■2.1 设计基于视觉反馈的机器人模糊预测控制策略
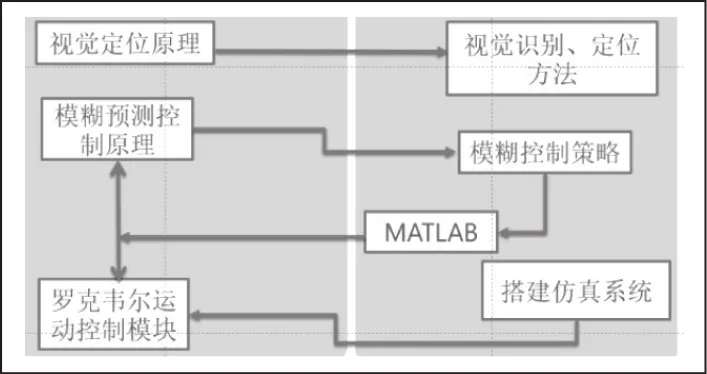
图3 基于视觉反馈的机器人模糊预测框架
分析模糊预测控制构建模型的原理,构建基于视觉反馈的机器人模糊预测控制策略,提取图像中的目标信息并依据不同目标实施相关的匹配与识别,以实现边缘检测和目标识别,提高其定位的快速性和准确性。
采用CCW6.0以上版本,Modbus OPC Server软件,以及MATLAB(OPC_TOOL),使用Modbus TCP/IP与OPC协议与MATLAB通讯。
通过处理当前图像信息的数据判断跟踪目标类别,运用模型预测控制预测目标未来状态,对不同的前方目标采用不同的权值来计算最优控制输入。
■2.2 利用罗克韦尔可编程逻辑控制器和伺服驱动器运动控制模块搭建仿真实验平台
视觉分拣系统采用罗克韦尔工业机器人作为分拣执行机构,利用罗克韦尔可编程逻辑控制器和伺服驱动器构成运动控制模块实现分拣动作,分析机器人的运动学、轨迹规划和工作空间。分析罗克韦尔可程逻辑控制器和伺服驱动器构成的运动控制模块功能,实现分拣动作。
结合我校罗克韦尔实验室进行理论研究和实验验证。利用罗克韦尔可编程逻辑控制器和伺服驱动器构成运动控制模块,预测控制模型相结合的方法,构建系统仿真实验平台。
3 结论
赋予机器人视觉是机器人研究的重点之一,其目的是要通过图像定位、图像理解,向机器人运动控制系统反馈目标或自身的状态与位置信息。摄像机被固定在云台下,一个机械手在一定范围内抓取和移动工件,摄像机利用动态图像识别与跟踪算法,跟踪被移动工件,始终保持其处于视野的正中位置。
基于机器视觉的定位方法能够更好地克服传统机器人示教编程完成分拣任务所存在的缺陷,对于多目标,工件的形状、尺寸和摆放位置不确定的分拣任务更加准确、智能化,逐渐成为引导工业机器人完成对目标的抓取问题很有前景的一类新型方法,且模糊预测控制构建模型提高对工件识别精度方法在实际复杂分拣生产线中的应用也不够多,目前国内外对该类方法的研究还不够深入。
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
时代英语·高一(2019年1期)2019-03-13
电影(2018年8期)2018-09-21
电子制作(2018年9期)2018-08-04
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
新闻前哨(2015年2期)2015-03-11
