
码垛机器人臂部及整体运动分析
2018-11-07 02:54:30陈菡菡
中小企业管理与科技 2018年23期
陈菡菡
(湄洲湾职业技术学院,福建 莆田 351254)
1 引言
机器人码垛机是现在流水线生产中必不可少的包装机械之一,他的主要功能就是将产品能够更好地进行码垛,保证产品的正常包装和搬运,这样就能够减少人工成本1。本文主要利用Solidworks有限元分析软件Simulation对码垛机器人臂部进行有限元分析,并对码垛机器人整体运动进行分析。
2 码垛机器人总体结构
该码垛机器人为四自由度机器人,整个设备由机械结构包括底部基座、腰部、臂部和腕部。总体结构如图1所示。
3 臂部的有限元分析与优化
Simulation有限元分析软件是Solidworks软件中的一个无缝插件,可以提供静力分析、热传导、扭曲、频率等多方面分析。利用Simulation对臂部装配体进行静力分析,得出臂部构件的强度和刚度的分析结果。首先建立前大臂、后大臂、小臂和大臂连杆的数学模型,设置零件材料,将零件连接设置为销钉接头,以最高点为危险受力分析,固定前大臂和后大臂的底端孔,选择合适单元类型及大小进行网格划分,运行分析得出应力分布图2和位移分布图3。可以找出小臂与前大臂连接孔为应力最大处。
通过simulation的有限元分析,可以在满足构件强度和刚度使用要求的前提下,使构件结构尺寸合理化,以减轻重量,减小转动惯量,节省材料,降低了制造成本。
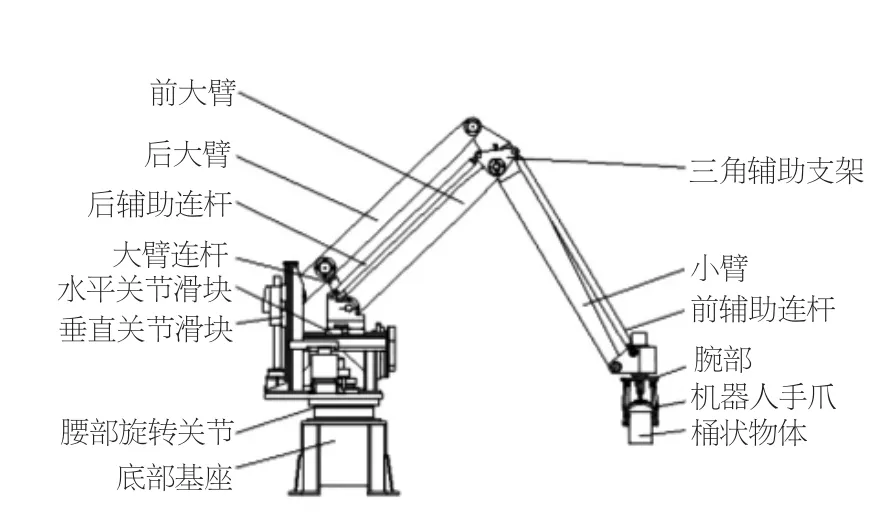
图1 码垛机器人结构

图2 臂部构件的应力分布图

图3 臂部构件的位移分布图
4 码垛机器人的运动分析
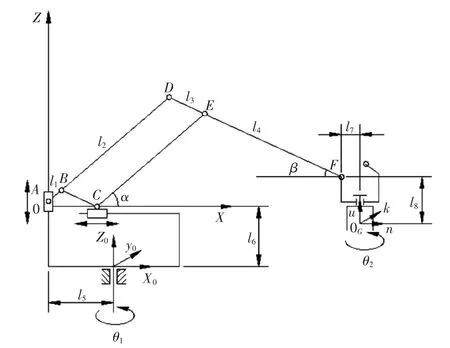
图4 码垛机器人的运动学分析
码垛机器人的运动学分析需要根据解析几何法建立坐标系3,分析其运动学特性,计算出其末端执行器的位置和姿态与各参变量的关系,绘制出码垛机器人的运动学简图。(图4)
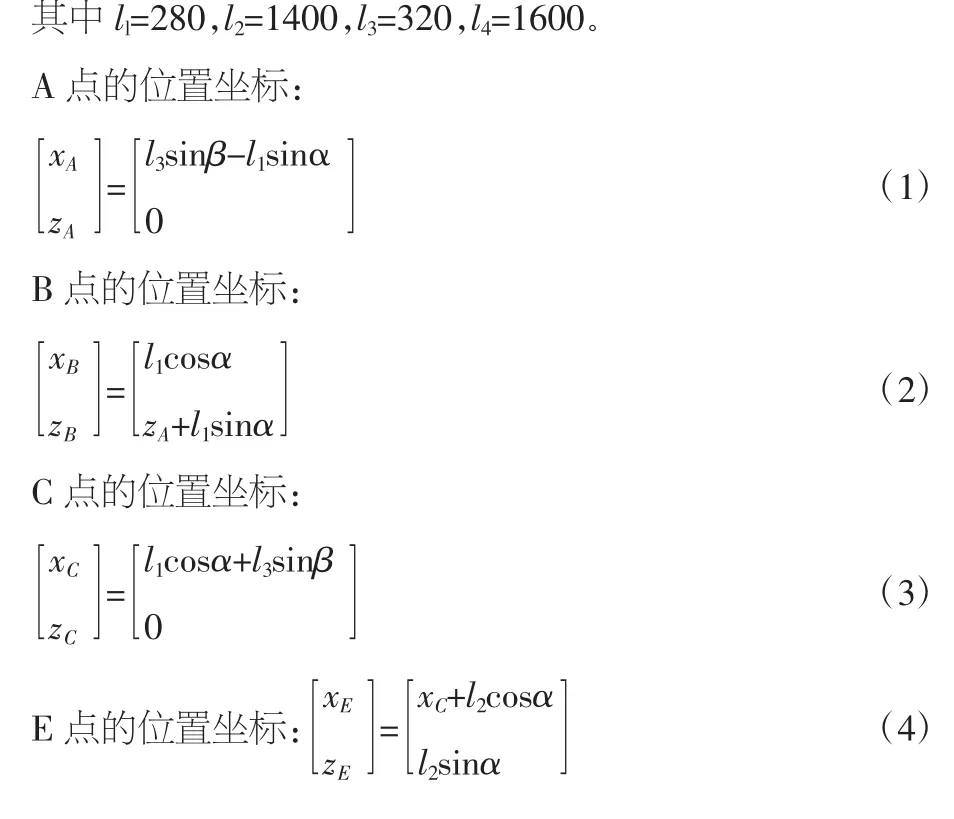

(9)式即码垛机器人G点的运动方程。通过伺服电机驱动水平运动副和垂直运动副,通过改变α、β以及θ1、θ2可以使得码垛机器人准确定位。
5 结论
本文通过Solidworks有限元分析软件对码垛机器人的臂部结构进行分析。通过模型的运动学分析和计算获得机器人的位姿变换关系式,从样机结果表明,该码垛机器人臂部结构紧凑,并可实现位置精确控制。
猜你喜欢
环境技术(2021年4期)2021-09-11 08:26:06
装备制造技术(2020年3期)2020-12-25 05:22:06
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
乡村地理(2019年2期)2019-11-16 08:49:34
瞭望东方周刊(2017年36期)2017-09-28 18:56:27
宝藏(2017年6期)2017-07-20 10:01:01
载人航天(2016年4期)2016-12-01 06:56:21
读者(2016年3期)2016-01-13 18:51:00
综合智慧能源(2014年1期)2014-09-10 07:07:40
