船载三维激光扫描系统在三峡库区库岸地形测量中的应用
2018-11-05 08:48
水利水电快报 2018年10期
(长江水利委员会水文局长江三峡水文水资源勘测局,湖北 宜昌 443003)
三峡库区属高山峡谷河段,岸线复杂、支汊繁多、库岸坡陡崎岖,地面坡度一般在30°以上,部分地区甚至超过90°。受大坝蓄水影响,库区存在30~40 m落差的消落带,因河水常年冲刷,库岸地形崎岖不平。使用传统全站仪测量手段迁站频繁且效率低,特别对于消落带及陡峭区,全站仪方法架站困难;免棱镜方法则受限于仪器最大测程,且植被密集区无法获取真实地形; GNSS RTK测量卫星信号受山体遮挡严重,易出现信号失锁现象;航测技术空域申请困难,近坝区属禁飞区,且三峡库区属狭长带状地形,费效比低。因此,亟需一种高效率、高精度、低安全风险的测量手段。船载三维激光扫描系统[1-2]属非接触式测量,具有自动化程度高、测量速度快、运行成本低、安全系数高等优点,能有效克服传统测量方式在三峡库区库岸地形测量中的诸多缺点,具有广泛的应用前景。
1 系统组成
船载激光扫描系统[3]是指基于GNSS定位仪、惯性导航系统(INS)以及三维激光扫描仪等多种传感器与技术集成的测量和信息采集的移动平台。其主要组成包括:GNSS卫星定位模块、360°高清全景相机、三维激光扫描系统、总成控制模块、惯性导航模块(INS)、一体化刚性平台等。
2 测量原理
船载三维激光扫描系统将三维激光扫描技术、惯性导航技术、GNSS后处理差分技术通过时间配准和空间配准的手段结合起来,最终得到扫描点云的空间位置信息。
2.1 主要关键技术[3-4]
(1)三维激光扫描仪通过激光脉冲装置获得目标点在激光扫描仪坐标系下的坐标值;
(2)惯性导航系统(INS)通过惯性元件获得运动体在IMU坐标系中姿态导航参数;
(3)GNSS后处理差分(PPK)利用基准站和流动站事后载波相位差分,获得流动站厘米级的大地测量坐标;
(4)时间配准[5]:船载移动三维激光扫描系统各个传感器都有各自独立的时间系统,为使其同步工作需通过GNSS时间戳进行精确时间同步;
(5)空间配准[6]:系统中各传感器采用不同的坐标系统,采集的三维空间信息各不相同。为了对采集数据进行融合处理,需要在多传感器局部坐标系和全局参考坐标系间进行多坐标系转换。
2.2 坐标系转换
(1)激光扫描仪极坐标系到激光扫描坐标系的转换。根据激光扫描仪的数据解析格式,将激光扫描仪获取的原始数据解析到激光扫描仪极坐标系,得到每个激光点的极坐标值(ρ,θ),然后进行坐标转换。设激光点P的坐标为 (xL,yL,zL),则坐标转换公式为
(1)
(2)激光扫描坐标系到IMU坐标系的转换。主要包括旋转(R)和平移(L)。获取激光扫描坐标系下的激光点坐标数据后,通过旋转和平移将其转换到IMU坐标系下(如图1所示)。
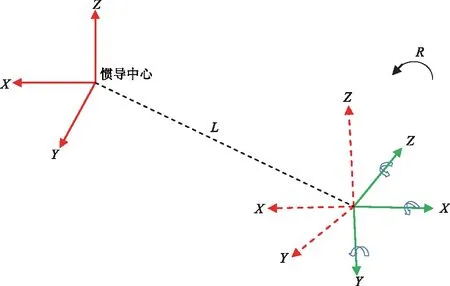
图1 激光扫描坐标系到IMU坐标系的转换示意
平移矩阵L是激光扫描坐标系与IMU坐标系之间的3个平移分量ΔRS即(ΔxIL,ΔyIL,ΔzIL)T,可以看成激光发射原点在IMU坐标系中的坐标[7];旋转矩阵RM是关于偏转角(α,β,γ)的函数,激光扫描坐标系下的激光点在IMU坐标系下的坐标(xI,yI,zI)T可由以下坐标转换公式得到:
(2)
式中,RM由以下3个矩阵合并而来:
RM=RγgRβgRα
其中:
旋转之后根据两坐标系之间的杆臂值L进行平移,实现激光扫描坐标系和IMU坐标系原点的重合,即可实现坐标系转换。
(3)IMU坐标系到当地水平坐标系的转换。GPS天线相位中心与IMU坐标系的中心也存在偏心量(ΔxIG,ΔyIG,ΔzIG),可看成GPS中心在IMU坐标系下的坐标[8]。
IMU可以测出传感器稳定平台的实时姿态,包括横滚(roll)、俯仰(pitch)和航向(heading),这3个姿态角即为当地水平坐标系和惯导坐标系间的欧拉角[9]。通过实时获取的姿态角数据即可将IMU坐标系下的激光点云转换到当地水平坐标系下。坐标转换示意见图2。
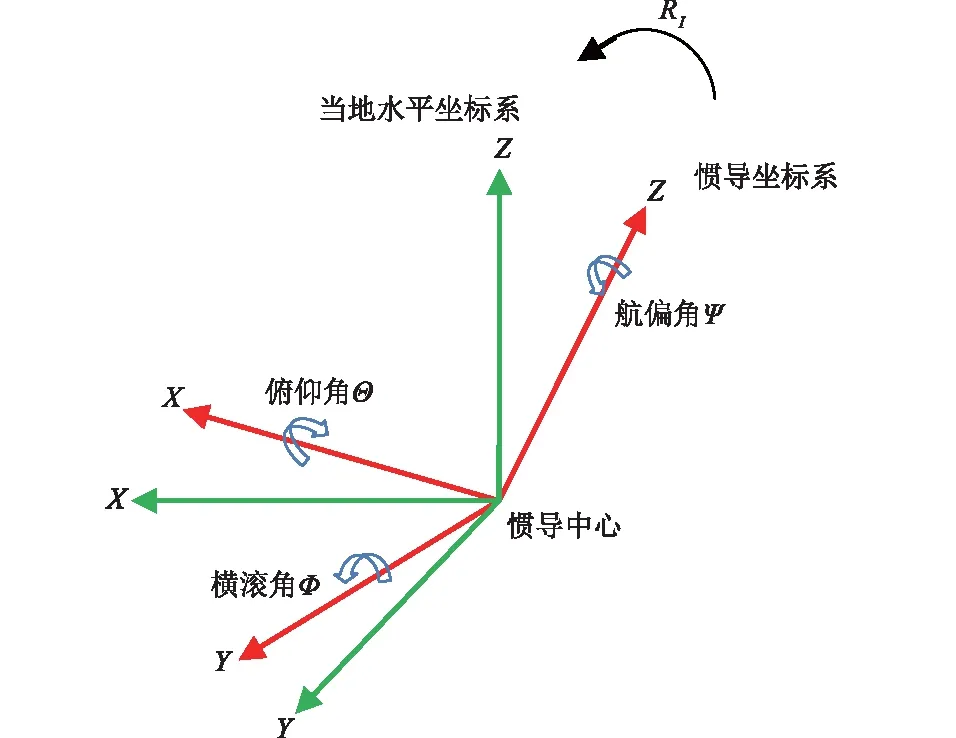
图2 IMU坐标系到当地水平坐标系的转换示意
若激光点在当地水平坐标系下的坐标为(xLH,yLH,zLH)T,则坐标转换关系为
(3)
式中,RN为IMU测得的姿态角构成的旋转矩阵,是横滚角Φ、俯仰角Θ和航偏角Ψ的函数。计算公式如下:
RN=RhRpRr
其中:
(4)当地水平坐标系到WGS84大地坐标系的转换。当地水平坐标系经过旋转平移可转换到WGS84系中。
3 库岸地形扫测
3.1 可行性研究
2014年与2016年,长江水利委员会水文局长江三峡水文水资源勘测局在三峡库区坝前河段、两坝间河段,开展了船载三维激光扫描测量系统在山区河段应用的适用性、可靠性、安全性和高效性试验。试验位置见表1。
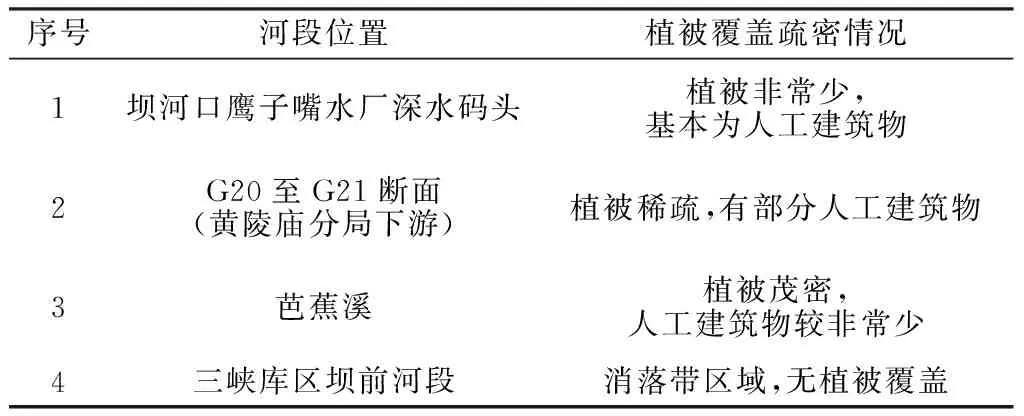
表1 试验河段位置
扫测精度验证共选取73点,包括了建筑物、堤岸特征点和不同密度植被覆盖区的地形点。与GNSS RTK方式共点测量结果比对,其点位中误差、高程中误差均满足1 ∶500以下比例尺测图要求。使用三维激光扫描系统扫测植被覆盖密集区,存在有效穿透植被性差和提取地面地形点困难等缺点。该系统适用于三峡库区消落带和河道植被覆盖稀疏区扫测。
在两坝间河段,还探索了测深系统与船载三维激光扫描测量系统集合组成一体化测量系统测量河道地形,实现了库岸与水下同步全覆盖测量,具有基准统一、高时效、低成本、测量精度高等特点。为水道地形全覆盖测量模式推广提供了重要的基础参考。
3.2 库岸扫测及数据分析
数据采集采用中海达iScan-M船载移动三维激光测量系统。测量基准为1954北京坐标系、1985国家高程基准,以7参数转换坐标。外业数据采集历时17 d,扫测库岸地形781 km,获取点云数据 103.1 GB、影像数据 302.1 GB。具体内外业实施流程见图3,外业测量工作见图4。

图3 内外业实施流程

图4 外业测量工作
3.2.1 库岸扫测
(1)基站架设。选择三峡库区新增设控制点架设GNSS进行静态采集,采用纯静态模式为STM设备提供后差分处理的静态数据,采集时间间隔为1 s,截止高度角为10°,并将每天的采集情况进行记录。
(2)IMU对齐。开机后首先让船体进行高动态的运动并对惯性测量单元(IMU)进行对齐;惯导对齐时船行驶的轨迹、速度、方向以及GNSS信号状态都对惯导的收敛有所影响。惯导动态对齐时按照直线、8字形以及圆形的轨迹进行收敛最为快速。
(3)数据采集。水上移动测量系统需要设置的参数分为主要的激光器参数和辅助的河景参数。为了保证点云的精度符合航道测量的需求,选择测距为950 m、垂直分辨率为0.05°、限制船速为7节(约13 km/h),可以保证垂直和水平方向的点间距在15 cm。河景的参数只有按照时间进行拍照,6 s/张,拍照间距约为21 m。
(4)验证点采集。在测区内均匀地选取地形特征点,采用传统RTK手段获取特征点三维数据,作为船载三维激光精度比对参照。
3.2.2 数据处理
(1)POS解算。利用Inertial Explorer数据解算软件,联合基准站GNSS静态观测数据和实时POS数据,通过紧耦合解算模式,解算出高精度的船载轨迹POS数据。
(2)参数求解。根据测区内控制点的国家2000坐标和1954北京坐标求解7参数并用于点云数据融合坐标转换。
(3)点云数据融合。利用HD DataCombine 3.0软件,根据IE解算所得的船载轨迹POS数据和求解的转换参数,将所测点云融合成1954北京坐标系坐标点云数据。
(4)点云编辑过滤。利用HDscene软件选出和删除噪点。
(5)影像处理与点云配准。利用hdPanoFactory软件将iScan采集的影像数据拼接成全景影像数据,利用HD_2LS_SCENE软件对全景影像数据与点云数据进行配准,方便后期处理成图时作为图像参考。
(6)数字成图。基于清华山维EPS2012(三维测图)数字测图软件,将三维激光点云数据导入,勾绘地形图。
点云影像数据融合见图5。
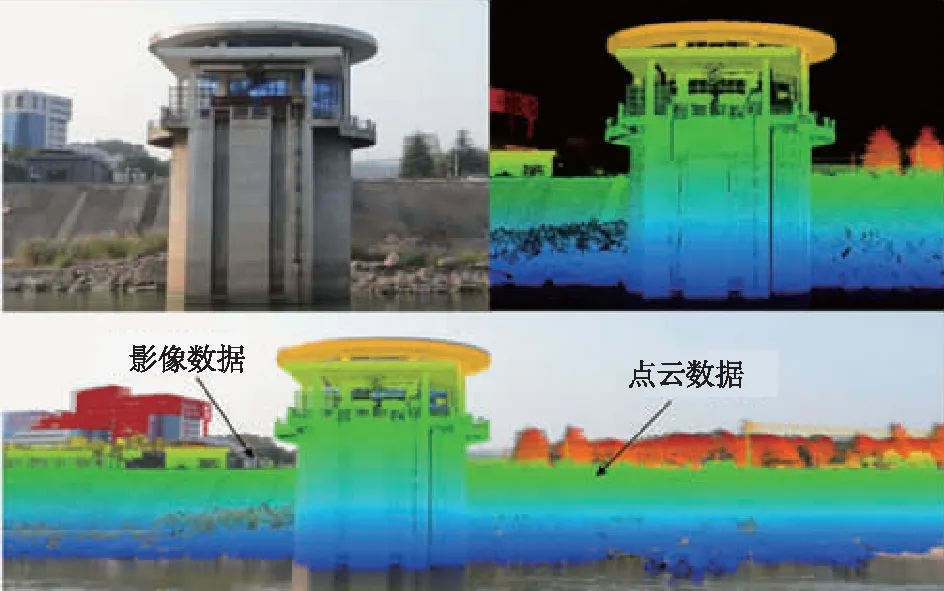
图5 点云影像数据融合
4 精度分析
4.1 误差分析
船载激光扫描系统是由多个传感器高度集成的测量系统,为了快速获取高空间分辨率、高精度三维激光点云数据与影像数据,在系统集成、数据采集方法和数据处理方面做了相应工作限制误差累积。
(1)系统集成误差。采用一体化刚性平台,将各个传感器集成到稳定的机械装置内,各传感器间的相对位置关系稳固可精确测定;
(2)系统标定误差。在实验场内利用工业测量系统进行多传感器系统整体标定;
(3)GNSS测量误差。采用GNSS后处理差分技术,利用Inertial Explorer软件解算出高精度的船载轨迹POS数据,有效消弱了GNSS动态差分引起的信号传播误差和比例误差;
(4)坐标转换误差。采用多源数据融合软件及坐标转换参数直接融合出1954北京坐标系坐标,消除点云数据二次坐标转换引起的误差。
4.2 实测精度分析
在测区内按一定间隔、不同反射介质提取船载三维激光的特征点共570点,采用GNSS RTK方式同点检测。检测所用基准站与激光扫测所用基准站不同。检测点位中误差±0.11 m,高程中误差±0.05 m,满足规范规定允许限差要求,见表2。

表2 测点精度统计
5 结 论
在精度、效率、作用等方面,船载移动三维激光扫描技术较传统测量技术具有明显的优势,具体体现在以下几个方面:①满足大比例尺测图要求;②外业扫测效率高,高精度的激光点云可直接获得测区的数字高程模型(DEM);③拍摄的全景影像数据可直接作为地形图勾绘的参考依据,可快速生成数字线划图(DLG)。同时,该技术也存在以下一些问题:①植被茂密区域穿透能力不佳;②全景影像数据与点云数据匹配性有待提高;③植被区点云数据及噪点的快速滤波手段不佳;④扫测时遇建筑物、船舶等,其背向侧会留下空白区,必须采用其他测量手段补测。
总之,船载移动三维激光扫描作为一项先进技术在河道测绘中具有突出的优势,特别是在山区河道测绘中其优势更为明显。随着扫测数据处理技术、手段逐步完善,其应用范围将更加广泛。
猜你喜欢
黑龙江水利科技(2020年8期)2021-01-21
治淮(2020年6期)2020-07-07
四川地质学报(2020年2期)2020-05-31
水利建设与管理(2020年4期)2020-05-11
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
治淮(2018年3期)2018-03-21
中等数学(2017年2期)2017-06-01
学习月刊(2015年14期)2015-07-09
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28