
基于平台和载荷一体化敏捷光学卫星结构设计研究
2018-10-29 09:41:08李文峰陈占胜
制导与引信 2018年1期
孙 伟, 钱 勇, 李文峰, 陈占胜
(1.上海卫星工程研究所, 上海 201109; 2.上海航天技术研究院, 上海 201109)
0 引言
近年来,高分辨率敏捷机动卫星已成为卫星遥感系统的重要发展方向之一[1];所谓敏捷卫星(agile satellite),是指具有快速姿态机动能力的卫星。敏捷光学卫星与高分辨率遥感仪器结合,借助整星敏捷姿态机动的性能,可实现空间高分辨率快速成像,实现包括同轨多条带拼接成像和同轨立体成像等多种模式成像,提高载荷利用率。
提高卫星的敏捷性能主要有两种方法:
a) 一是配置大输出力矩的控制执行机构[2],提高卫星的姿态机动性能,如采用使用大力矩动量轮或控制力矩陀螺;
b) 二是从设计上减小卫星的固有惯量,缩小整星尺寸并使质量相对集中,在此基础上优化整星构型。
在工程设计中,单纯使用大力矩执行机构,会过多消耗机、热、电等整星宝贵的设计资源,卫星构型也限制了大尺寸执行部件使用;从整星总体设计分析,优化整星构型,减少卫星尺寸,使卫星获得较小的惯量较为经济可行;较小的卫星,可选择较轻控制执行机构,降低整星质量或在选用同等执行机构条件下,进一步提高卫星姿态机动性能。
承上述,提高卫星敏捷性能较可行的方法为优化卫星构型,并在此基础上开展结构设计。对于敏捷光学卫星结构设计要解决以下问题:
a) 合理设计卫星平台及载荷优化整星构型及惯量,使卫星平台与光学载荷连接达到整星紧凑性;
b) 整星模态特性满足运载要求;
c) 卫星主结构具有较大强度裕度;
d) 卫星可为单机提供良好的力学承载环境。
1 敏捷光学卫星构型及结构设计
1.1 卫星构型设计
设卫星采用降交点地方时6:00太阳同步轨道,则卫星可采取构型如图1、图2所示。
X向为飞行方向,Z向为对地观测方向,卫星可通过绕俯仰轴大角度姿态机动(如图2)在保证卫星能源前提下,实现对同一目标A的连续观测
或目标的前后成像;也可以通过滚动轴姿态机动,实现区域内平面目标成像;由于帆板固连与星体,卫星可采用姿态机动的方法使得太阳帆板获得较为优异的光照角来获得足够的能源。
高分辨率相机与卫星平台连接方式可分为直接对接式、嵌入安装式、一体式三种,三种构型与连接方式对比如表1所示[3]。

表 1三种构型及连接方式对比
从工程可实现性及卫星平台设计继承性考虑:
a) 一体式设计结构最为紧凑,但在当前太阳同步轨道下,卫星绝大多数单机无安装面,散热面积不够,不利于载荷散热;
b) 采用“嵌入安装式”优化卫星平台结构与载荷结构设计,可保留原有卫星平台结构,单机安装和散热面都得到较好解决;
c) 通过优化太阳电池阵与星体连接方式,在降低整星惯量同时,减少帆板挠性振动对整星影响,增强高分辨率光学遥感卫星的成像质量。
1.2 卫星平台与载荷结构优化设计
“嵌入安装式”实现如下,载荷主结构为圆筒形如图3(a),卫星主承力筒为“圆柱+圆锥”结构如图3(b),因此以相机主结构代替承力筒上端圆柱筒结构,设计如图3(c)所示。
卫星平台与相机一体化设计与卫星平台、相机主承力结构分别设计差异如下:
a) 像机载荷与卫星结构安装接口由承力筒柱段更改至锥段,整星质心高度降低约0.3 m,X、Y两轴主惯量下降了约40%(参见表2),由此不仅改善了卫星横向基频,并进一步降低了结构质量;
b) 整合后的一体化设计满足光学部件承载要求,依据承力筒柱段承载条件及力学特性要求设计,借鉴了现有卫星承力筒设计思路,充分继承现有平台结构方案,设计也具有很好的继承性,大大减轻工程化难度。
结构参数确定时,充分考虑以下因素:
a) 碳纤维在铺层设计达到每层承载均匀化,不存在薄弱铺层;
b) 合理设计承力筒圆锥段锥度,避免较剧烈过渡,产生应力集中;
c) 在传力路径保证完整性,主载荷传力可设计多条,并行加固。
主传力路径路线从上至下设计如图4所示。
载荷由结构板和桁架梁将在轨工作部分的过载以及贮箱安装板上的燃料载荷传递到承力筒、星箭连接环(Ф 937接口)、适配器至运载火箭。
在进行梁系结构设计时,接头处采用一体化成型设计,优化结构质量,杆件与接头处采用胶结方式固定。
1.3 太阳电池阵与星体连接设计
根据惯量计算公式,3块太阳电池阵附加到整星惯量计算为

(1)

表2 卫星质量特性(相对质心)
因此,太阳电池阵采用两块展开,一块与卫星固连的方式(如图5),摒弃原两翼展开太阳电池阵方案(每翼1块半)。
整星在展开后的相对质心的惯量(kgm2)矩阵为
(2)
两翼对称式太阳电池阵展开后相对质心惯量(kgm2)值为
(3)
从计算结果可以看出,体装式太阳电池阵整星惯量较小。
1.4 质量特性比较
相机直接安装到卫星承力筒构型与卫星平台与相机一体化结构设计后,两者质量及主惯量比较如表2所示。
从表中比较,采用“嵌入式”一体化结构设计比传统相机直接安装,降低了卫星质心,将X、Y两轴主惯量(相对质心)优化了20%,提高了卫星敏捷性。
2 卫星结构有限元分析
为验证整星的结构力学特性,根据整星构型、布局与结构初步设计方案,对卫星进行了整星结构动力学分析。
2.1 有限元建模
(1) 建立方法
整星有限元模型如图6所示,根据结构组件力学特性划分为线单元[4-5]、面单元、体单元,通过节点来表示结构中位移、应变、应力等物理参数;根据结点自由度特征,组合得到整体刚度矩阵、质量矩阵,载荷列阵;再根据不同分析工况,对刚度矩阵、质量矩阵进行处理,并进行求解。在卫星结构建模时充分模拟结构物理特性,不仅仅在结构几何上与实物一致。
(2) 质量特性
整星有限元分析的质量特性如表3所示。
根据结构模型的简化,整星有限元模型含12 082个网格节点,1 086个CBAR单元, 72个CBEAM单元,1 368个CHEXA体单元,8 328个CQUAD4四边形板壳单元,768个CTRIA3三角形板壳单元以及1个CONM2单元。
(3) 边界条件
边界条件为星箭对接环各节点固支连接。
2.2 结构特性分析
(1) 模态分析
模态分析的基本的有限元方程为
[K]{u}=0
(4)

在进行模态计算时,卫星底部固支,整星主要模态频率如表4所示。

表3 整星有限元模型质量特性(相对星箭分离面)
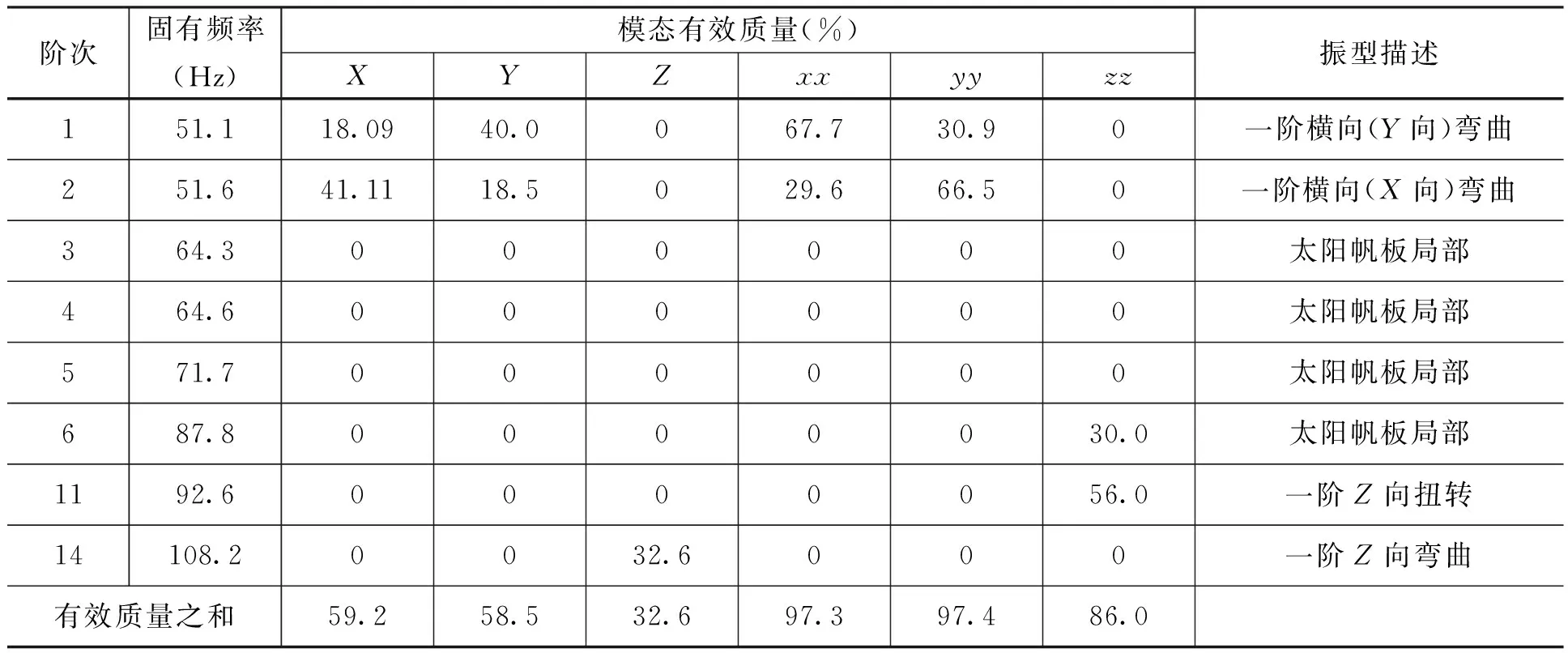
表4 整星前20阶模态及模态有效质量的计算结果
图7、图8为卫星Y向、X向一阶弯曲频率。
从模态结果可以看出,一阶基频在50 Hz以上,满足运载对卫星基频要求,整星具备良好的刚度特性。
(2) 静力分析
静力学分析的基本的有限元方程为
[K]{u}={p}
(5)
式中:[K]为整星的弹性刚度矩阵;{u}为结点广义位移向量;{p}为结点载荷向量。
(a) 静力分析工况
根据运载方提供的卫星质心处准静态过载系数,选取1.5倍的安全系数,得到卫星设计的准静态设计载荷。依据准静态设计载荷确定整星静力分析工况(三方向)如表5所示。

表5 卫星整星静力分析工况
(b) 整星静力分析结果
上述4种工况下的最大变形见表6所示,4种工况下最大形变不大于0.5 mm。

表6 卫星整星最大形变
(c) 分析结论
其余主要结构部件静力分析结果在此不再详述,直接给出结果如下:承力筒最大应力为39.1 MPa,远小于材料许用应力;整星桁架最大应力为29.8 MPa,远小于材料许用应力;星箭连接环最大应力为44.4 MPa,小于铝合金的许用应力。
上述部件代表了卫星处于过载以及底部固支状态下最为危险的状态,卫星在给定的过载工况下,星体结构受力安全。
(3) 动响应分析
动响应分析方程如下
(6)

频率响应分析采用星箭分离面输入激励的边界条件,通过模态叠加法,对整星在三个方向上的频率响应进行分析;X/Y/Z向在8 Hz~100 Hz范围内,振动幅值取1 g,阻尼比取0.05。最大加速度统计如表7所示。

表7 X/Y/Z方向最大动响应及位置
从动响应结果来看,动响应最大发生在太阳电池阵与卫星连接处等力学环境较苛刻处,最大量级不大于14 g,可为载荷提供较优的力学承载环境。
(4) 分析结果总结及讨论
整星结构模态、静力学及动响应特性各项指标较好;在结构优化设计方面,可在太阳电池阵与卫星连接处设计局部“角撑”改善局部动响应特性;在满足整星力学性能基础上,并进一步优化结构质量,减薄主承力筒壁厚,优化支撑梁截面积、相机支撑的拓扑结构等。
3 结论
本文采用相机与卫星平台一体化连接方式来设计卫星主结构,该设计有效地降低了卫星惯量,非常利于卫星敏捷性能实现;有限元分析表明,结构模态、静力学变形及应变、动响应各项指标较优,满足各项设计要求,各项结构指标可通过模态、静力学及振动试验进一步考核验证。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
军民两用技术与产品(2021年10期)2021-03-16 06:05:06
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
太空探索(2016年3期)2016-07-12 09:58:35
太空探索(2016年1期)2016-07-12 09:56:05
电源技术(2016年9期)2016-02-27 09:05:46
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
航天返回与遥感(2014年4期)2014-07-31 17:47:47
航天器工程(2014年2期)2014-03-11 16:35:24
