
面向应用创新型人才培养的智能科学与技术专业综合实训探索与实践
2018-10-25 03:14张新强李家琦周国顺
计算机教育 2018年10期
张新强,李家琦,周国顺,韩 媞
(大连东软信息学院 电子工程系,辽宁 大连 116023)
0 引 言
智能科学与技术专业综合实训作为专业培养方案中的一级压顶石项目[1],是对本科前三年所学专业知识和实践能力的全面综合。其设计是否合理,教学过程是否实施有效,学生是否提升了专业核心能力,直接决定了专业方案对培养具有社会责任感、创新精神、国际视野和较强实践能力的应用型高级专门人才实现的效果,直接影响学生的就业。
1 实训教学中存在的问题
传统的工科院校实践教学体系,仅仅是向学生提供实验室原有的、分立的各种教学仪器设备来进行模拟实践训练,这种训练模式难以使学生掌握本专业的核心能力和创新能力,距“综合的、系统化的工程实景的训练”还有较大的差距,毕业生到企业后还需重新进行专业技能培训,远不能满足企业对人才培养的需求。
智能科学与技术专业属于交叉学科,涵盖了电子信息技术、计算机硬件和软件、人工智能、自动控制等多项技术领域的应用[2]。如何保持实训内容与时俱进,同时又使内容相对稳定,以保障在教育有限投入下的可实现性,一直是比较难解决的问题。只有解决了这个难题,才能解决受训学生专业技能与用人单位要求的差距问题,进而解决学生就业问题。
TOPCARES-CDIO一体化人才培养模式下,如何设计实施综合实训以体现对智能科学与技术专业人才培养的压顶石作用,如何在实训中提升学生的专业应用能力和专业创新能力,完成应用创新型人才的培养,使学生达到用人单位的要求,解决学生的就业问题,是智能科学与技术专业综合实训教学中亟待解决的问题。
2 智能科学与技术专业综合实训实施方法
2.1 确定智能科学与技术专业综合实训核心能力体系
要确定专业综合实训的核心能力体系,关键在于正确把握社会对该专业人才提出了什么样的能力要求。主要通过以下步骤:首先,通过调查智能科学与技术专业人才招聘要求,校企合作单位用人需求,在岗毕业生反馈,确定智能科学与技术专业就业所需的相关能力;其次,通过进一步梳理,明确所设专业与社会需求对应的层次及能力结构,得出就业所需核心能力,作为实训教学实施的能力层面设计的内容;最后,学生工作后,根据学生和用人单位的反馈,不断对能力体系进行修正,迭代完善。图1为多方合作制定能力体系及课程内容示意图。
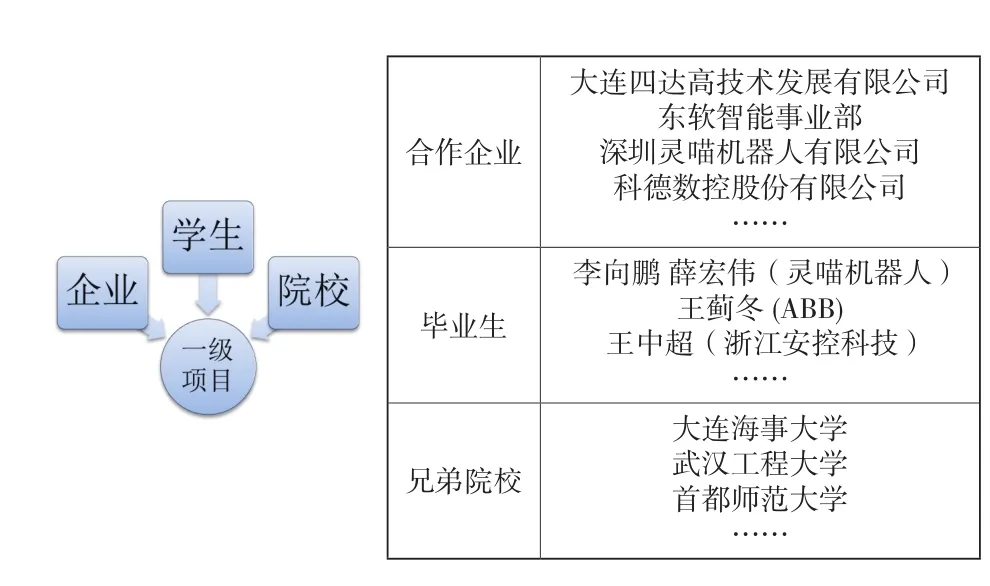
图1 多方合作制定能力体系及课程内容
2.2 合理设计智能科学与技术综合实训内容
专业综合实训的设置,不是对培养方案中已有课程的重复,而是对教学内容的一种整合。充分吸收广大师生和用人单位的意见,研究制订实训课程标准与教学内容,还要考虑到学生知识、能力的实际差异,以满足不同层次学生的需要,同时内容上做到与时俱进(2015年至2017年为TurtleBot移动机器人走迷宫,2018年升级为TurtleBot移动机器人与Kuka工业机器人协同智能制造)。最后,做好对毕业生的跟踪调查,及时获取用人单位对学校毕业生的需求信息和使用情况的反馈信息,对专业综合实训做出相应的调整。
智能科学与技术专业综合实训的教学师资全部是有企业产品开发经验的教师。实训内容由课程组的老师根据真实项目研发流程,依据学生水平,结合学生知识基础(先修课)定制。目前实训基于智能制造场景如图2所示,TurtleBot移动机器人从物料仓库由Kuka工业机器人装载物料(3D打印的多种几何体),然后到达必经通道,识别手写体数字,按照约定的号码处进入4x4迷宫,从迷宫出口出来后,到达生产流水线处,Kuka工业机器人通过机器视觉完成物料识别,进而抓取物料放到相应的流水线。整个项目结合移动机器人与工业机器人,学生需要完成物料处Kuka工业机器人编程,完成移动机器人的定位导航及目标识别,以及生产流水线处基于机器视觉控制Kuka工业机器人完成物料的分拣。学生需要完成系统的需求分析、系统设计、软件实现、系统集成与调试和系统测试,同时完成项目报告。实训项目实施的中间环节,学生可以进行自主命题发挥。
这种真实开发环境的构建,提供了适当的问题情境、外部潜在刺激,由认知学习理论可知,学生的自定目标是学习的重要促动因素[3]。这种实施过程的自主命题发挥促进了学生学习效果以及应用创新能力的提升。
2.3 注重专业综合实训的教学方法和组织形式
教师在充分研究授课内容在专业培养目标中的作用和与学生日后工作结合度的基础上,采用以真实的工作任务为依托的项目教学方式,创造使学生充分发挥潜能的宽松环境,创设尽可能真实的职业情景,使学生置身其中,积极主动地去探索、尝试、创新。同时积极采用“仿真实验与实体实验相结合”[4]的实践模式,进行课上课下一体化教学。项目过程环节进行开放性命题,引导学生被动学习转向主动学习,激发学生组内合作,组间竞争,进行个性化命题发挥,充分激发个人的创造力。
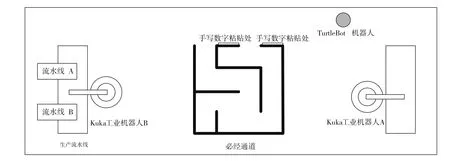
图2 TurtleBot移动机器人与Kuka工业机器人协同智能制造示意图
2.4 检验学生能力的综合实训考核
考核方式包括形成性考核和终结性考核,在成绩的权重上更注重过程性。整个实训项目在教学过程中被分解为一系列小的单元项目,每个单元项目有一个过级目标,只有考核通过才能进入下一个单元,各单元考核为形成性考核。终结性考核方式包括报告撰写、系统演示、项目答辩、题库抽题口试等,不进行传统的闭卷考试。在考核主体的确定上,突出多元性,如教师评价、自我评价、小组评价等。
3 智能科学与技术专业综合实训特色
3.1 采用能力培养与教学内容分层设计的方法进行实训教学设计
智能行业技术发展日新月异,不断有新技术产生,为了使学生更好地就业,要求实训的内容必须不断更新。从教育角度看,课程内容只有经过相对稳定的沉淀积累才能有好的教学效果,所以这两方面是矛盾的。这个问题在专业人才培养角度看也是个难题,实训作为压顶石项目,处在人才培养出口,问题更加急迫。采用实训能力与内容分层设计方法,在保障培养工作需要的相对稳定能力的前提下,有选择地改变实训内容。而内容的选择可以根据能力与内容的对应关系,选择一段时间内相对稳定的技术作为教学内容,这样也符合教育的自身特点,同时也能控制教育的投入。这项方法实现了智能科学与技术专业综合实训教学平台的软切换(2015年至2017年为TurtleBot移动机器人平台,2018年升级为TurtleBot移动机器人与Kuka工业机器人联合平台)。
3.2 课内课外一体化实践模式突破了传统教学学时的限制
使用ROS系统和Gazebo软件进行项目预研仿真,写一次代码,不需要修改即可在仿真平台和实体平台上分别运行,学生可以清楚地看到运行的现象或结果,从而迅速理解和掌握机器人的工作原理以及机器人的一般开发流程、方法。这样对于学生来说相当于有了随身的移动实验室,学生可以随时进行实验,而到了实验室,可以使用实体机器人进行验证,引导学生进行课上课下一体化学习实践[4]。学生可以根据自主命题的项目设计,进行个性化实验完成开发,学生在实践中不但能巩固已学到的知识,更重要的是能根据所学的知识发挥创新和创造力来完成自主命题项目,从而使自身专业应用能力和专业创新能力得到提高。
3.3 建立了专业综合实训与社会需求的良性联动机制
专业综合实训核心能力体系的确定建立在对社会需求的充分调研基础之上,同时根据毕业学生用人单位的反馈信息进行不断修正,使学生通过实训能在毕业前就达到用人单位的专业技能要求,真正实现零距离对接。此外,通过发达的社交手段(网站问卷,微信,QQ,微博等),实训课程组定期与毕业学生、校企合作单位、兄弟院校进行交流,相比传统走访大大提高了效率。
4 结 语
我校于2012年经教育部批准设立智能科学技术专业,同年开始报收第一批学生。学校将应用型人才作为人才培养目标,应用创新型人才培养是我校智能科学技术专业课程体系中的重要指标与特色。学校构建实施的TOPCARES-CDIO一体化人才培养模式强调培养高素质应用型人才的实践能力。TOPCARES-CDIO项目划分为5级,其中一级项目(综合项目)是指包含本专业主要核心课程和能力要求的综合项目,重点培养学生的专业核心能力[1]。在大学前三年的实践学习基础上,实施压顶石项目(10教学周共200学时),全面强化学生的专业实践技能,这等于让学生在毕业前就拥有了“工作经验”。
我校智能科学与技术专业综合实训,从2015年开始,已经实行4轮。经过几年的实践改进,探索出一套面向应用创新型人才培养的切实可行的实训方案。基于智能制造工业应用背景,学生在实训过程中结合先修课程所学相关知识,在真实机器人开发过程中,提升了专业应用能力。采用开放性命题方式,学生发挥创新意识,使用多种方案完成移动机器人的导航,如使用单目视觉、双目视觉、RGBD传感器以及二维激光传感器等。特别是在今年移动机器人与工业机器人协调场景中,增加了基于机器学习完成分类的环节,学生可以使用不同的算法完成识别分类。学生通过实训掌握了机器人系统的开发方法、流程,提升了学生的应用能力、专业创新能力,促进了学生就业。这些作品还作为实践作品成果展示给大家,极大地鼓舞了学弟学妹们的学习热情。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2021年1期)2021-06-09
智慧健康(2021年33期)2021-03-16
计算机教育(2020年5期)2020-07-24
电子技术与软件工程(2019年20期)2019-11-30
电子制作(2019年10期)2019-06-17
计算机测量与控制(2018年9期)2018-09-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
