全液压岩心钻机提下钻机械手的设计
2018-10-23 11:31:24郎霞俊
机械管理开发 2018年10期
郎霞俊
(沁和能源集团有限公司永安煤矿, 山西 晋城 048205)
引言
提下钻是岩心钻机的核心机构,它是决定钻探效率的重要因素之一。传统模式的手工提下钻虽然使钻探工作更为细致准确,但是缺点在于费时长、劳动强度大。采用机械手提下钻的模式则可以克服以上缺点,实现提下钻的自动化,大大缩短钻探周期,提高钻探效率[1]。全液压岩心钻机提下钻机械手是一个机电液一体化系统,主要由机械、液压、电气控制等部分组成。提下钻机械手是能够自动完成提下钻杆拧卸钻杆和排放钻杆等任务的机械装置。该机械手的控制系统是核心,起指挥作用,控制其按相应的动作顺序进行作业,采用液压传动来实现机械手的动作执行[2]。
1 提下钻机械手手指结构设计
当前提下钻机械手的人工手持部分为圆柱形的钻杆。考虑到该钻杆为圆柱形、质量较大等情况,故将机械手手部结构设计为单支点回转型夹持式手部结构,如图1所示。
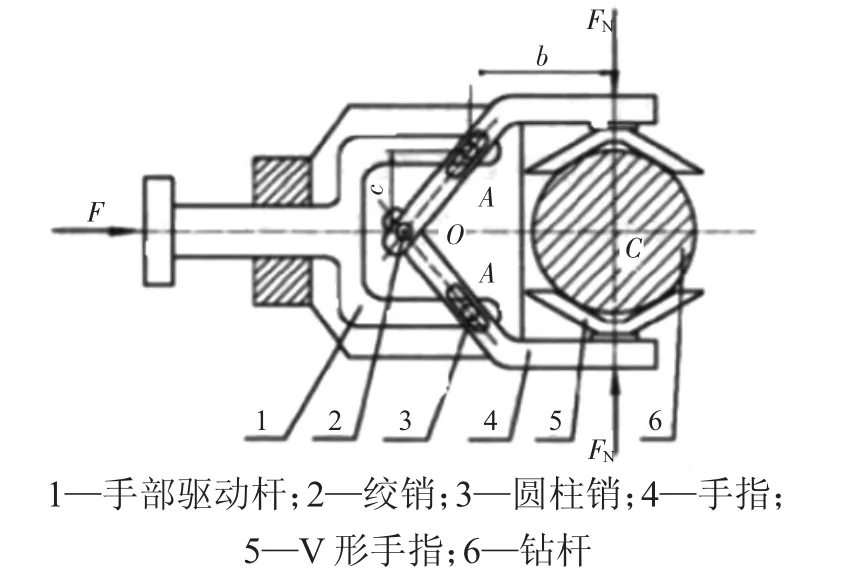
图1 单支点回转型滑槽式手部结构示意图
单支点回转型夹持手部的工作原理为:手部驱动杆1的前端为手指开合油缸的活塞杆,驱动杆的后端分为两个分支,末端分别安装有圆柱销3。手指的两杆件上开有滑槽,用于圆柱销的滑动。由于手指的两杆件通过绞销2连接,固定在安装板上。当手指开合油缸的无杆腔后将会推动活塞杆运动,即产生手指张闭的驱动力。在驱动力的作用下,驱动杆末端的圆柱销3在手指杆件的滑槽中滑动,从而带动手指的杆件绕绞销2连接处转动,实现手指的夹紧和松开。驱动杆即手指夹紧液压缸的活塞杆向左运动,手指绕绞销点O转动,缓慢张开,在驱动杆的作用下,当圆柱销3在手指杆件的滑槽内运动到最左端时,手指达到张开的极限状态。驱动杆即手指夹紧液压缸的活塞杆向右运动时,手指绕绞销点O转动,缓慢闭合,在驱动杆的作用下,当圆柱销3在手指杆件的滑槽内运动到最右端时,手指达到闭合的极限状态[3]。
2 提下钻机械手手腕结构设计
提下钻机械手在岩心钻机工作过程中,负责钻机处与钻杆库之间的抓取搬运工作。在钻杆的装卸与运送的过程中,钻杆一直处于垂直被抓取的状态,直至被机械手搬运至钻杆库相应的位置时,钻杆会被倾斜放置,此时需要机械手的手腕做一定角度的回转动作。该设计中,1为手指开合驱动杆,2为手指开合液压缸的缸体,因此手指开合动作由手指开合液压缸来实现。该设计结构促使手腕与手部更加紧凑,使手部运动作用更加便利。
该设计布置能保障手指开合液压缸的油管顺利通过,在腕部回转时油路仍然能保持畅通,这种布置使得油管既不暴露在外面,又不受扭转。手腕与臂部相连接,油管由手臂内通过并经过腕架分别进入手腕回转液压缸和手指开合液压缸[4]。
回转液压缸的定片与缸体连接,是固定不变的,动片通过螺钉、圆销钉与输出转轴连接。随着压力油经过油孔进出入油腔中,动片与定片之间的油腔中液压油的压力逐渐升高,油腔中的压力油推动动片带动输出转轴作回转运动,从而实现手部的旋转动作。手腕回转角度由液压缸的动片与定片之间允许回转的角度来决定。设计中液压缸的回转角度为±90°。用位置检测元件对位置进行检测并加以反馈控制,采用机械档块定位。
3 提下钻机械手手臂的结构设计
在本系统中,该提下钻机械手的手臂主要支承着手部抓取钻杆和搬运钻杆。基于全液压岩心钻机提下钻机械手的工艺,可知道机械手的提钻动作顺序如下:
手指张开→手臂伸出→手指闭合(夹紧钻杆)→手臂下降→手臂缩回→手臂旋转(反)→手臂伸出→手腕旋转(正)→手指张开(放钻杆)→手臂缩回→手指闭合→手腕旋转(反)→手臂旋转(正)→手臂上升→停止。
升降动作靠机身做直线运动的液压缸来实现,手臂回转动作靠机身的回转液压缸来实现。手臂的结构设计中,升降液压缸之上为手臂部件,下面为回转液压缸。回转液压缸的动片与花轴轴套固定在一起,通过花键轴套带动花键轴回转,活塞杆在升降液压缸内做升降运输,即实现手臂的升降动作[3]。
4 提下钻机械手的三维建模
在三维建模过程中,对于比较复杂的机械系统而言,如果不进行模型简化,在确定系统的动力响应上有一定的困难。模型简化主要是对系统相应的参数进行等效和简化,同时对系统的某些次要的固有特性进行忽略。本论文当中在不影响提下钻机械手性能的前提下,对提下钻机械手的三维建模进行了下列简化:对液压缸与安装底板之间的安装连接等处进行简化,在装配连接定义中采用刚性连接、销钉连接和圆柱连接等来代替实际工作中的功能。在三维建模中,各液压缸的进油和出油管路并未在模型中体现出来,便于模型能够更加美观地表现出来。经过简化设计后,可以得到提下钻机械手的三维模型。
5 岩心钻机提下钻机械手的液压系统设计
根据提下钻机械手作业时两组液压缸流量差距比较大,因此在液压系统设计当中采用双泵供油系统,目的是降低溢流损失,同时也降低系统的发热。如图2所示,该机械手手臂升降液压缸及手臂伸缩液压缸供油采用大流量泵,手臂回转液压缸、手腕回转液压缸及手指夹紧液压缸供油全部采用小流量泵。大小双泵供油系统的设计,能很好地起到节能效果。
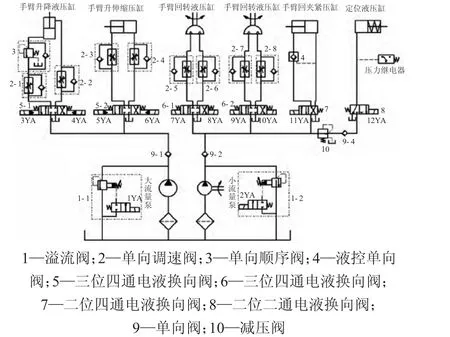
图2 提下钻机械手的液压系统图
6 结语
当前全液压岩心钻机提下钻机械手装置应用比较广,可以自动完成提下钻杆、拧卸和排放钻杆等作业。对全液压岩心钻机提下钻机械手进行设计分析,有利于提下钻自动化控制的应用研究,同时可以为岩心钻机智能化的设计提供相应的参考,对智能化岩心钻机的发展具有重要意义。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31 09:48:02
钟表(2020年5期)2020-11-06 06:36:20
西南石油大学学报(自然科学版)(2019年2期)2019-04-25 13:08:46
小主人报(2018年21期)2018-11-07 03:50:02
快乐语文(2016年10期)2016-11-07 09:44:57
实用手外科杂志(2015年4期)2015-08-27 01:54:14
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:45
中华皮肤科杂志(2014年4期)2014-12-19 12:56:00
中国药业(2014年21期)2014-05-26 08:56:48
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:38