基于超宽带的温室农用车辆定位信息采集与优化
2018-10-20 06:43林相泽林彩鑫薛金林郑恩来
农业机械学报 2018年10期
林相泽 王 祥 林彩鑫 耿 晶 薛金林 郑恩来
(南京农业大学工学院, 南京 210031)
0 引言
全球卫星定位系统(Global positioning system,GPS)的卫星信号经过室内层层障碍之后衰减严重,不能应用于室内定位[1-2]。随着温室大棚的逐年增加,温室内农用车辆机械化、智能化需求增长迅速,室内定位技术成为满足上述需求的关键[3-6],温室精细农业的发展也亟需一种无线定位应用系统[7-8]。
相比传统定位技术,室内定位技术起步较晚。自美国联邦通讯委员会(Federal communications commission,FCC)在1996年制定了E-911定位标准以来,室内定位技术得到了快速发展,国内外学者相继提出了多领域的室内无线定位应用,如无人机对农田的实时监测、智能可视化作业[9-11],移动机器人的自主导航、路径规划[12-15],工业中的过程控制、工业监测等[16]。随着温室精细农业的迅猛发展,众多学者开始了温室内的定位研究。文献[17-19]在温室中利用无线RSSI测距技术,使用加权质心算法获得定位测量结果后,利用卡尔曼滤波算法进行定位信息最优化计算;WIDODO等[20]在温室中设计了基于声波的定位系统自校准方法;LUO等[21]利用RSSI测距技术进行了温室内的定位研究以及王俊等[22]利用BP算法进行温室内的定位研究。目前,由于温室复杂的环境,温室内定位技术的研究主要针对静态物体的坐标测量,且精度在几米之内。在实际测量过程中,测量数据主要受3方面的影响:试验设备的制造误差、安装误差以及室内环境内部对信号的遮挡等影响;传感器偏差、灵敏度误差、噪声等其他随机误差等影响;信号传播特性和测距方式的影响[23-25]。因此,提高定位精度必须提高抗干扰能力,解决信号衰减、多径效应、视距传播和信号振荡校准等传统问题。除了温室内无线定位技术的精度问题,能耗和成本是目前无线定位技术的一个重要考虑因素。目前大部分的定位技术都需要在环境中安装辅助节点,用于测距位置信息,为提高精度,就必须安装大量的辅助节点,但增大了系统建设的成本和能耗。在测量误差和能源消耗不可避免的情况下,减小测量误差和控制能耗显得尤为重要。
考虑上述原因,脉冲超宽带(Impulse radio-ultra wide band,UWB)技术因其较强的穿透力、较高的传输速率和较小的功耗而引起广泛的重视[26]。通过发送纳秒级或者纳秒级以下的超窄脉冲来传输数据,可以获得吉赫级的数据带宽,具有很强的时间分辨率,可获得厘米级测距精度。UWB定位技术因其精度高、能耗低、设计简单、成本低、网络节点布置方便,对场地环境无苛刻要求,适合于温室等室内环境中使用。目前,UWB测距技术主要包括:接收信号强度(Received signal strength indication,RSSI)[27-28]、信 号 到 达 时 间 (Time of arrival,TOA)、信号到达时间差(Time difference of arrival,TDOA)和信号到达角度(Angel of arrival,AOA)。其中TDOA有以下优点[29]:不存在相位模糊的问题,因此测向基线可以不受限制,系统复杂度低和系统定位的精度较高。
基于UWB技术的上述特点,本文选择UWB技术作为无线载波通信技术,构建基于TDOA测距技术的超宽带室内定位试验平台,并针对单一测距技术以及环境因素等各种影响带来的测量误差,分别采用K-means聚类与截段处理的方法处理静态、动态精确定位问题,实现被测目标位置信息的优化求解。最后,利用相应的硬件设备,在实际温室生产环境中进行试验验证。
1 定位试验平台设计
1.1 硬件设计
采用Ubisense公司生产的射频芯片作为系统硬件基础单元。该芯片符合IEEE802.15.4—2011超宽带标准。超宽带为6~8 GHz、传输通道为2.4 GHz、刷新率为0.01~20 Hz。标签刷新率根据标签运动速度和状态从0.004 5~40 Hz自动分配,每个传感器均支持持续达160 Hz的刷新速率,能够以6.25 ms的时间间隔对标签进行定位同时采用常规双向2.4 GHz信号进行控制与测算信息传输。
在此硬件的基础上,开发了UWB定位试验平台,如图1所示。基站通过与标签之间的信号传输,测得UWB信号在标签与基站的传输时间,计算机读取标签接收的时间数据之后利用 TDOA定位算法,以确定标签的位置信息。

图1 试验系统模块图Fig.1 Test system module diagrams1.基站芯片核心板 2.基站芯片底板 3.基站接收天线 4.标签芯片 5.标签电池
1.2 TDOA测距算法
1.2.1定位坐标的获取
TDOA定位问题中,通过测量2个基站到达待定位物体的传播时间可以得到TOA测量值,进而可以得到TDOA的测量值。通过两个及两个以上的TDOA测量值可以得到待定位物体的二维位置坐标。假定待定位物体的位置坐标为(x,y),距离待定位物体最近的基站,即服务基站BS1的位置坐标为(x1,y1),其他参与定位的基站位置坐标为(xi,yi)(i=2,3,…,M;M为参与定位的基站数)。由TOA的测量值可以得到
(1)
其中式(1)左右两边平方可得
(2)
其中
式中Ri——基站BSi与待定位物体之间的传播距离
待定位物体到基站BS1与基站BSi的传播距离差Ri,1为

(3)
其中传播速度C为3×108m/s,ti,1为待定位物体到BSi与BS1的传播时间差值,由于
Ri=R1+Ri,1
(4)
所以联立式(1),可以得到
(5)
其中
xi,1=xi-x1yi,1=yi-y1
可以把x、y、R1作为未知数,此时式(2)为关于这3个变量的三元一次方程,联立方程组可以求得待定位物体的位置坐标。
1.2.2TDOA测距原理
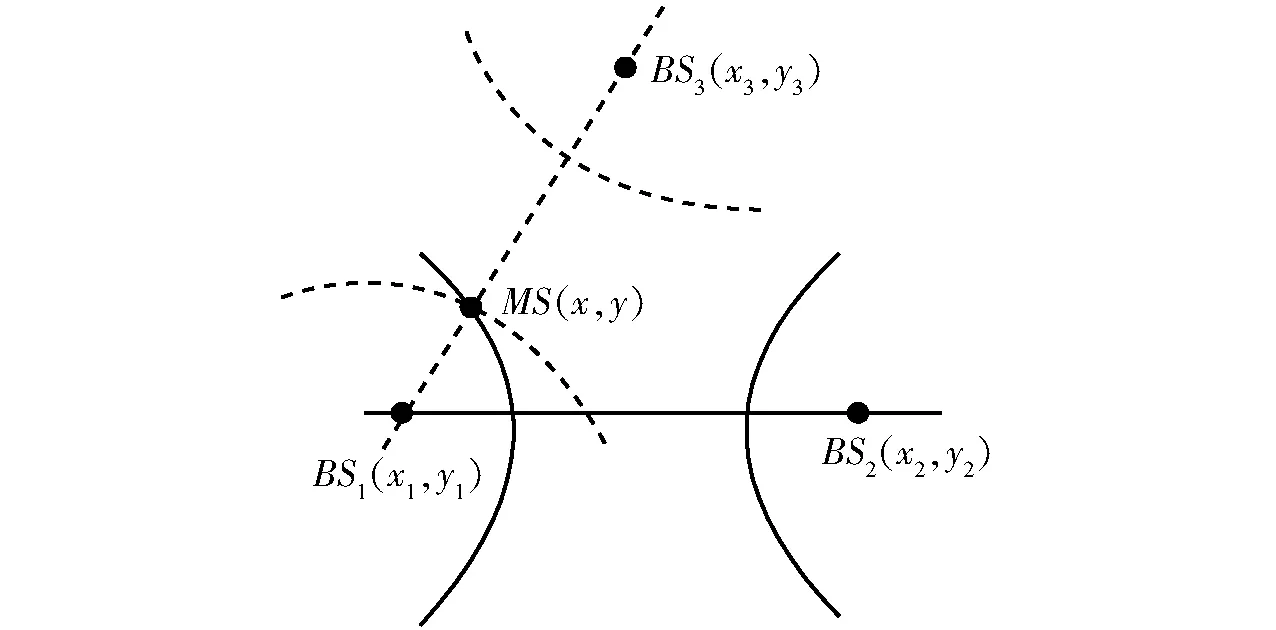
图2 TDOA测距双曲线Fig.2 TDOA ranging hyperbola
到达时间差TDOA是根据多个TDOA 数据对应的多条双曲线的交点来估计目标发信机的位置。由于通过2个监测站的 TDOA 计算,只能得到一条目标信号源可能位置的双曲线,准确定位目标信号源位置,至少在此设定3个基站和1个标签组成定位系统。如图2假设标签MS的位置为(x,y),基站的位置分别为BS1(x1,y1)、BS2(x2,y2)、BS3(x3,y3),利用TDOA测距方法测量到的标签与基站的距离分别是ct1、ct2、ct3,其中ti(i=1,2,3)为对应信号到达时间。标签坐标为
(6)
(7)
式中c——光速
1.2.3TDOA误差分析
虽然,超宽带脉冲信号具有高达纳秒级别的时间分辨能力,结合基于TDOA的测距算法在理论上可获得厘米级别的定位精度[30],但是,在复杂室内环境下,UWB信号传播过程中的多径和非视距(Non-line-of-sight,NLOS)现象会影响TDOA测距误差,是造成定位精度下降的主要原因[31-33]。造成多径误差的原因是由于接收机不能区分直达径和多径信号,使得相干TDOA估计中相关波形峰值偏移,导致距离估计误差。NLOS误差则是由于收发机之间直达路径DP被障碍物阻挡,仅有反射或透射信号到达接收机,对非直达径的TDOA估计导致恒正的距离偏差。由于在测量过程中的误差影响不可避免,因此,定位信息的优化计算显得尤为重要。
2 定位信息优化
2.1 静态精确定位算法
2.1.1算法设计
当静态测量坐标值时,UWB定位是利用纳秒至微秒级的非正弦波窄脉冲不断发射脉冲信号传输数据的。因此,由于测量时误差来源的干扰,对同一位置,在一段时间内,测得的坐标数据会以一定的测量误差分布在真实点的周围。利用算法使得处理后的点接近真实点,便能提高定位的精度。由于温室环境的操作往往需要进行多个点的同时定位,聚类方法可以解决求已知分类个数的中心的问题,因此本文采用K-means聚类算法处理静态定位问题。
2.1.2K-means工作原理及流程
K-means属于无监督学习,样本所属的类别是未知的,根据特征将样本分类[34]。K-means核心思想为最小化所有样本到所属类别中心的欧氏距离和,采用迭代的方式实现收敛[35]。
(1)工作原理
输入:聚类个数k,以及包含n个数据对象的数据库。输出:满足方差最小标准的k个聚类。
(2)算法流程[36]
①给定训练样本{x(1),x(2),…,x(m)},x(i)∈Rn,随机选取k个训练值分别为μ1,μ2,…,μk∈Rn。
②计算每一个样本i的所属类别
(8)
式中c(i)——样本到类别中心欧氏距离最小类别
③更新每一类的中心μj
(9)
式中Q——类别j中所有样本特征和
q——类别j中的样本个数
④不断重复步骤②、③,直到畸变函数J(c,μ)收敛
(10)
式中J(c,μ)——所有样本到其类别中心的欧氏距离平方和
2.2 动态精确定位算法
2.2.1算法设计
标签运动过程中,在某一特定时刻t,设备测得的数据是唯一的,所以不能使用聚类算法来实现动态精确定位。当设备在一个时刻t测出一个数据(x,y)时,由于UWB设备测数据的随机性和无规律性,很难找出一个固定的算法进行改进。因此,本文使用截段处理的方法,利用转向角随时间变化的特性来实现动态的精确定位。
2.2.2算法工作原理及流程
以农用车辆的圆运动为例,标签从起点到终点移动了一段距离,截取其中一段极短时间间隔[t1,t2],如图3所示,t1为起始时刻;t2为测量时刻;θ为t1时刻转向角;y=k1x+b为t1时刻坐标与转向角构成的直线;m为设备测取点;n为动态算法处理的点。
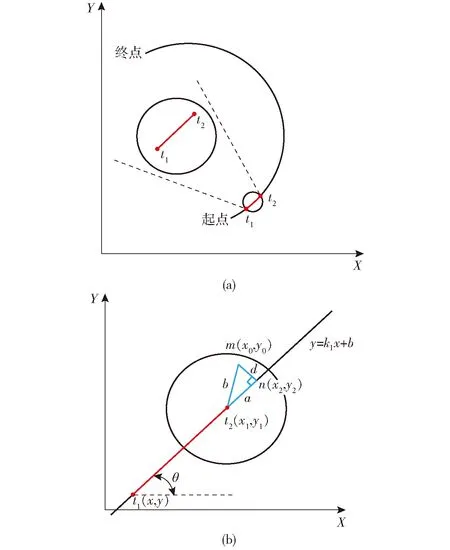
图3 农用车辆作业仿真路线图Fig.3 Diagrams of agricultural vehicle operation simulation routes
由于选取时间短,可将标签从t1到t2时刻运动的路线看作一条直线,如图3a放大部分所示。具体算法如图3b所示,如果t1时刻坐标(x,y)已知,再测得t1时刻的转向角θ,即可求得直线y=k1x+b。这时,用UWB定位设备在t2时刻测出一个数据点m为(x0,y0),则点m到直线y=k1x+b的距离为
(11)
根据m点与直线y=k1x+b的位置关系,求得点n(x2,y2)。分如下两种情况:
情况1:点m在直线y=k1x+b下,则
(12)
情况2:点m在直线y=k1x+b上,则
(13)
由几何定理可知,如图3b所示,点n即为改进后的坐标,(x1,y1)为t2时刻标签的实际坐标,易知改进后的坐标优于TDOA测距方式测得的坐标值。
3 试验验证
3.1 试验设备
试验在江苏省农业科学院番茄玻璃温室进行,试验田垄垄长10.2 m,垄宽0.6 m,番茄株高约1.8 m,试验条件为无自然风,温度约为31℃,湿度为58%。首先,根据观察试验实际场地并结合TDOA测距算法布置基站节点。本文选定3个基站,节点排布如图4所示,分别记作BS1(x1,y1)、BS2(x2,y2)、BS3(x3,y3),1个标签记作MS,进行固定坐标系下的定位试验,测取标签的位置信息(x,y);其次,根据图4所示的基站节点,将基站安装在温室大棚相应节点位置的铁架上(基站高为2.4 m),完成室内定位试验平台的搭建;最后,将标签固定在南京农业大学研制的温室自行走施药机器人上,如图5所示。使用计算机分别读取标签到各个基站的时间信息并利用TDOA算法进行农用车辆的定位。具体步骤为:建立坐标系,选取坐标原点;对基站进行供电;进行基站之间的时间同步;将标签固定在农用车辆上;利用计算机读取标签到基站的时间信息;在计算机上使用TDOA算法进行农用车辆的定位。
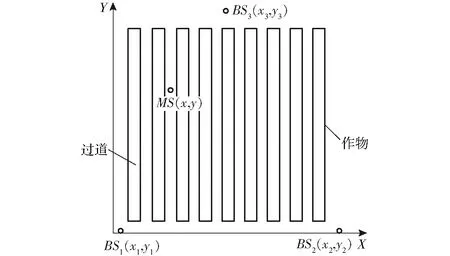
图4 定位试验节点排布示意图Fig.4 Sketch of location test node

图5 试验实景图Fig.5 Experimental scene diagram
3.2 试验结果及分析
3.2.1静态定位试验
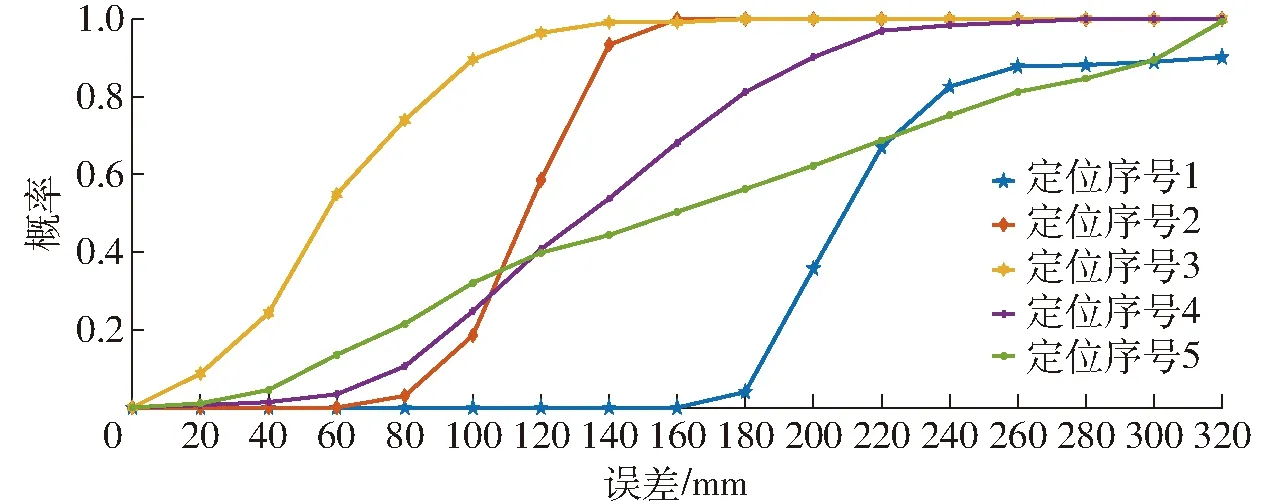
图6 不同测量距离的误差累积分布函数Fig.6 Cumulative distribution function of error of different measurement distances
试验根据TDOA测距算法,利用车辆在温室中的不同的静态位置分别采集3 min,500 组数据,测量值与实际值的距离差即为误差距离。图6分别给出了在5次不同静态位置进行试验的误差累积分布函数,即在不同静态点下测量数据的误差小于或等于某个数值的概率。由图6可知,当用TDOA测距算法测量车辆位置时,误差距离都在120 mm以外,有些甚至达到了260 mm。
从表1可以看出,将K-means算法应用到静态点的优化时,使用K-means聚类算法处理后的最大误差为0.100 3 m,最小误差为0.022 1 m,平均误差为0.063 4 m,验证了该聚类算法对优化静态定位的有效性。通过上述分析可知,使用K-means聚类可以使得设备测取的数据接近真实点,以达到提高定位精度的效果。
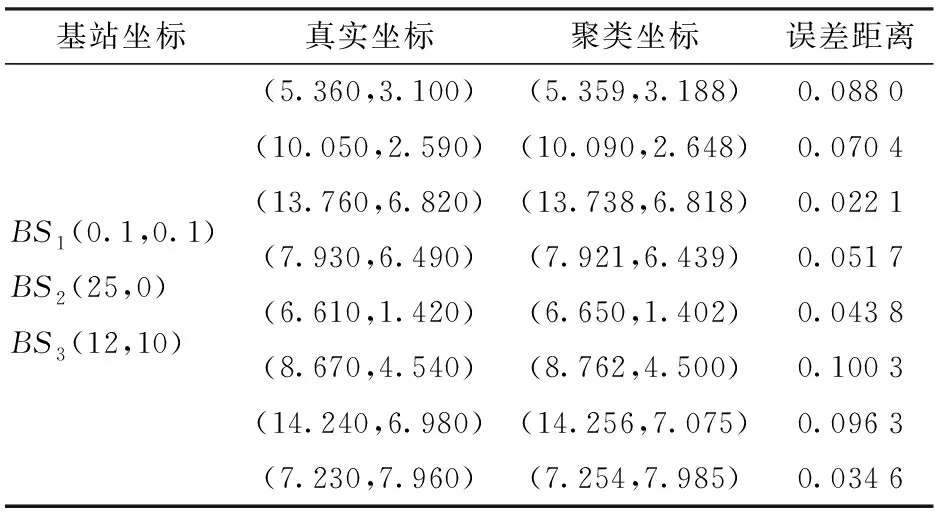
表1 K-means算法优化下TDOA算法的测量值与实际值对比Tab.1 Comparison of measured and actual values of TDOA algorithm with K-means optimization m
由此可见,当用TDOA测距算法测量标签位置信息时,验证了K-means聚类算法对优化静态定位信息的有效性。通过上述分析可知,使用K-means聚类可以使得设备测取的数据接近真实点,以达到提高定位精度的效果。
3.2.2动态定位试验
试验采用了TDOA算法作为测距方法,并且在图4所示的基站节点的排布方式基础上,进行动态定位试验。在温室中分别选择其中1条或多条货道,从起点开始,分别以0.1、0.2、0.3 m/s的速度匀速行进,图7显示的是沿着其中一条货道行驶的路径,同时采集相应的数据。将采集的数据和实际行走轨迹进行比较,其中1次货道的行走测量路径信息如图8所示。
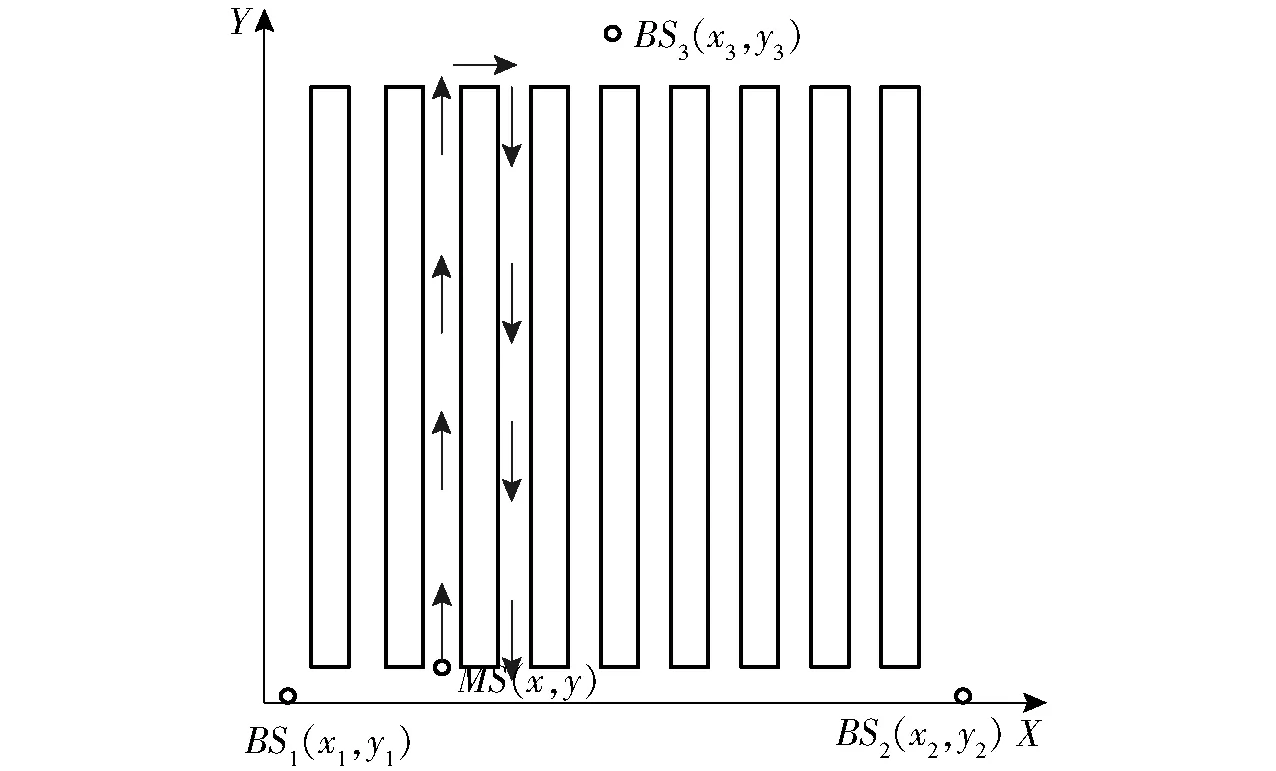
图7 系统定位试验路线图Fig.7 System positioning test route
通过表2~4可知,在车辆运动过程中,利用TDOA测距方法测量的点难以达到8 cm以内的精度,大部分的误差距离都在15 cm以上。通过动态精确算法改进后达到8 cm精度的平均概率为31.348%,优于设备本身的平均概率8.34%。该动态改进算法使设备原有概率提升了3.7倍以上,验证了算法优化的有效性。
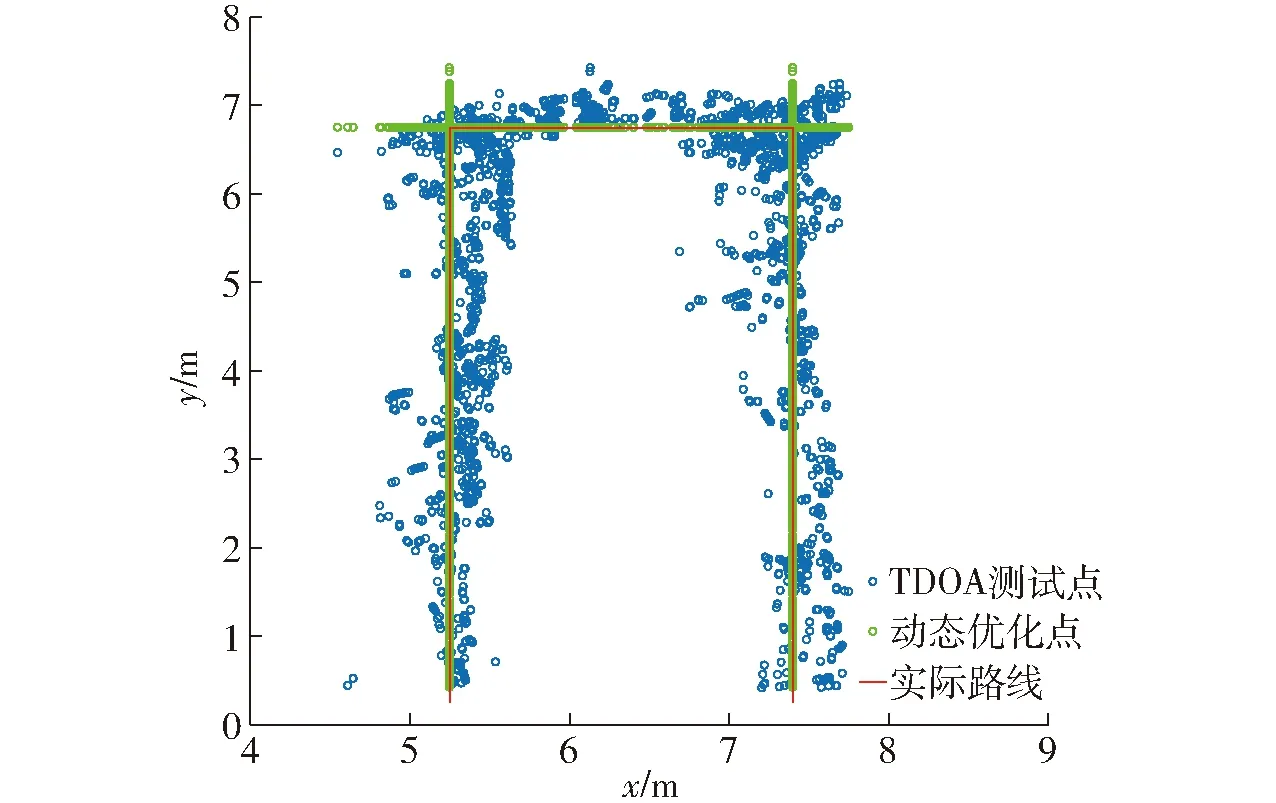
图8 动态试验结果Fig.8 Dynamic test result
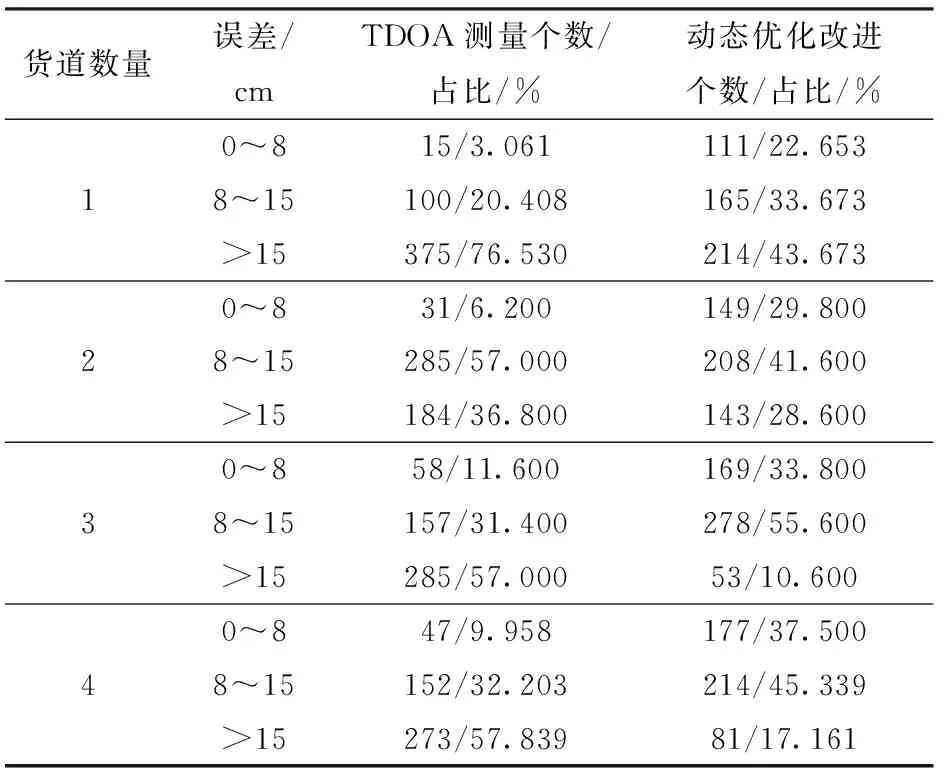
货道数量误差/cmTDOA测量个数/占比/%动态优化改进个数/占比/%0~815/3.061111/22.65318~15100/20.408165/33.673>15375/76.530214/43.6730~831/6.200149/29.80028~15285/57.000208/41.600>15184/36.800143/28.6000~858/11.600169/33.80038~15157/31.400278/55.600>15285/57.00053/10.6000~847/9.958177/37.50048~15152/32.203214/45.339>15273/57.83981/17.161
4 结论
(1)利用TDOA测距技术,根据标签与基站的信号接收时间,进行温室环境下标签位置的测量。再分别利用K-means聚类与截段处理的方法进行静态、动态定位信息优化计算,以消除脉冲信号传播特性和单一测距方法导致的测量误差,获得准确的定位信息,为温室农用车辆精确作业提供了技术支撑。
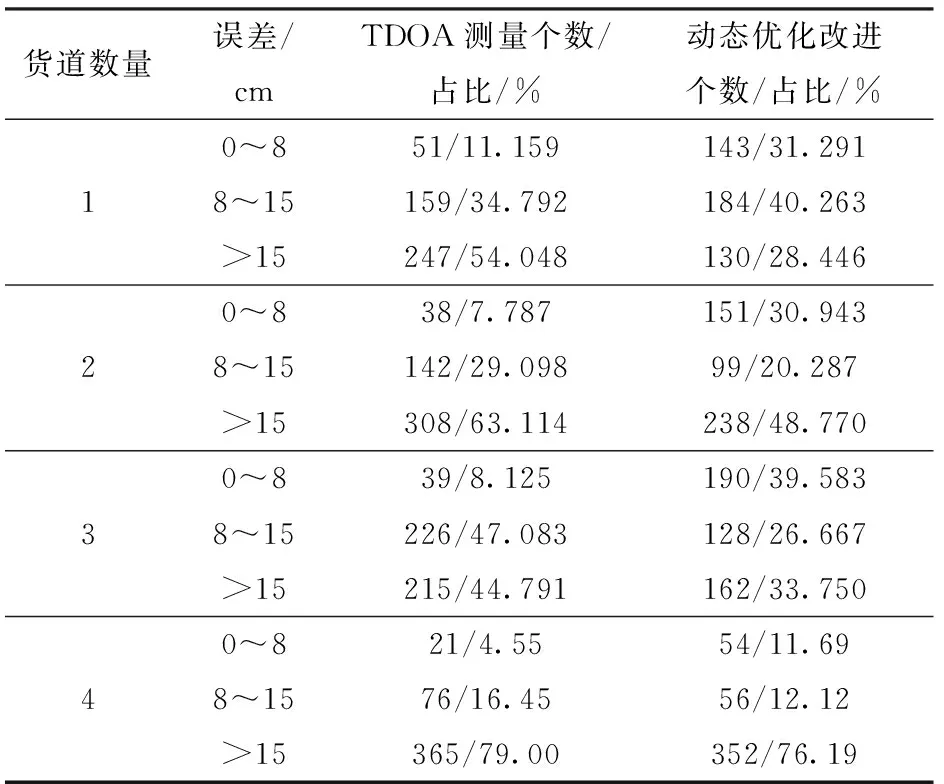
表3 动态优化对比(0.2 m/s)Tab.3 Dynamic optimization contrast(0.2 m/s)
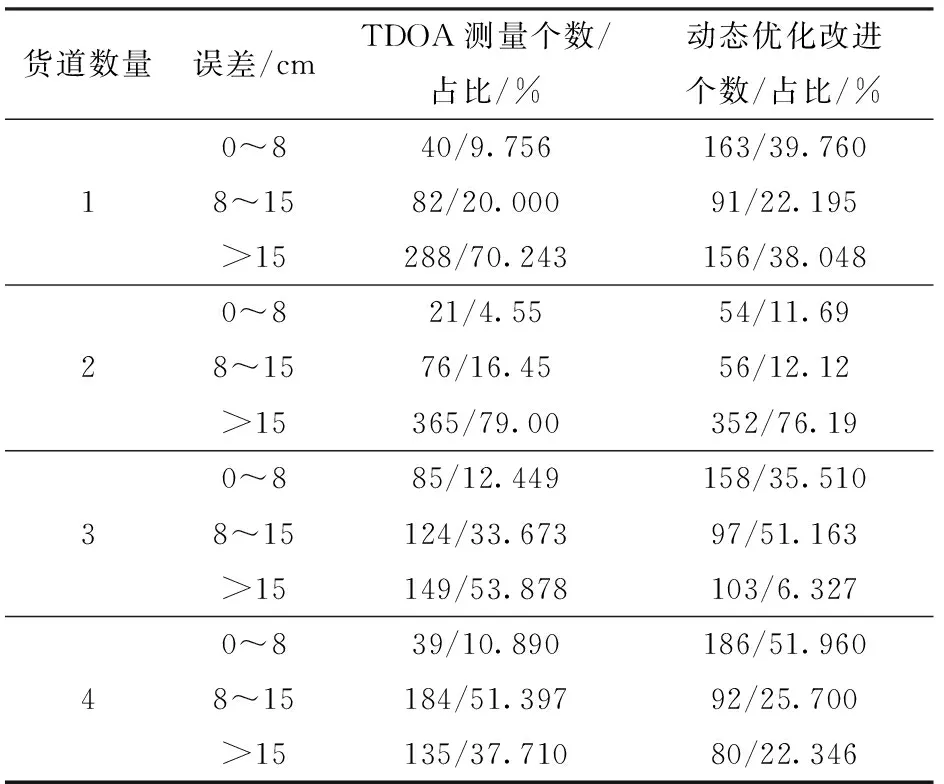
表4 动态优化对比(0.3 m/s)Tab.4 Dynamic optimization contrast(0.3 m/s)
(2)利用射频芯片 Ubisense作为脉冲超宽带技术的硬件基础搭建定位试验平台,并在温室环境下进行静态以及动态定位试验。将TDOA算法得出的定位信息与优化后的定位信息进行对比得出比较结果。
(3)试验结果表明,在温室环境下仅仅利用TDOA测距算法的定位精度并不理想,利用动静态优化算法可以获得较高的定位精度。静态定位精度平均值为0.063 4 m,动态定位精度在8 cm的概率提升至原来的3.7倍,可以为温室环境下农用车辆的精细作业提供定位基础。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
农业工程技术(2022年1期)2022-04-19
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
通信技术(2020年2期)2020-03-26
科学(2020年3期)2020-01-06
恋爱婚姻家庭·青春(2019年9期)2019-12-10
英语文摘(2019年2期)2019-03-30
电子制作(2017年8期)2017-06-05
电子制作(2017年7期)2017-06-05