一种噪声未知条件下的盲信号提取方法
2018-10-18 08:22任子良
电子科技大学学报 2018年5期
任子良,秦 勇
(东莞理工学院计算机与网络安全学院 广东 东莞 523808)
盲信号处理技术经过不断发展,已被广泛应用于状态估计、信号检测、特征提取、目标追踪和无线通信等领域[1-5]。如果将收集观测数据的传感器阵列替换为传感器网络,可极大地扩展盲信号处理技术的应用范围。因节点带宽和能耗等条件受限,使得传统的盲信号处理技术不一定适用传感器网络。
在盲信号处理技术中,基于贝叶斯递推的非线性滤波是一类有效的估计方法。文献[6]通过建立状态空间方程,实现了卡尔曼滤波(Kalman filter, KF)方法的盲信号分离;文献[7]采用无先导卡尔曼滤波方法(unscented Kalman filter, UKF),实现了系统的动态估计混沌信号的盲分离;文献[8]利用容积卡尔曼滤波方法(cubature Kalman particle filter, CKF),实现了混沌信号的盲分离;文献[9]研究了传感器网络受限条件下的盲信号提取问题;文献[10]以粒子滤波(particle filter, PF)方法为基础实现了传感器网络受限条件下的混沌信号盲分离。
非线性滤波方法在建立状态空间法方程的过程中需要明确已知源信号的演化方程,而各种非线性滤波方法有其不同缺点:UKF方法是基于“近似概率分布要比近似任意的非线性函数或非线性变换要容易”,没有严格的数学推导[11];CKF方法基于三维球面径向积分准则,具有严格的数学推导,可以减少了EKF、UKF等的误差传递,但难以推导出高阶滤波算法[12];PF方法以序列蒙特卡洛采样和贝叶斯估计为基础,可以在采样离子足够多的情况下达到任何估计精度,但计算量较大,且容易出现粒子退化等现象[13]。此外,贝叶斯框架滤波方法的一个重要前提条件是需要已知状态空间方程中的噪声和源信号的统计特性,而一般的应用场景都不能满足此条件限制。
在研究传感器网络中的盲信号处理问题时,需要将观测信号进行量化处理,而所引进的量化噪声和信道噪声、观测噪声等混合叠加后的整体系统噪声难以用准确的数学模型表示,从而使得传统的非线性滤波方法难以满足实际需求。文献[14-16]在PF方法基础上,提出了一种代价参考粒子滤波方法(cost reference particle filter, CRPF)实现参数的优化估计。CRPF方法通过用户自定义粒子的代价函数和风险函数实现粒子的重采样和迭代更新,极大地减少了对噪声和源信号统计特性的依赖。
随着硬件技术的发展和微型处理器计算能力的提升,使得在传感器节点上采用复杂且有效的粒子滤波算法成为可能。通过对比选择,本文在CRPF基础上提出了参考代价容积卡尔曼粒子滤波方法(cost reference cubature particle filter, CRCPF),用以解决传感器网络受限条件下的盲信号提取问题。算法首先以源混沌信号的映射方程为基础建立所需的状态空间方程,进一步采用容积点变换来获得相对精确的预测粒子,并通过代价和风险函数的映射权重对粒子进行重采样和迭代更新,进而得到提取向量并实现源信号的盲提取。通过计算机仿真评估了传感器网络无簇模型中算法的提取性能,仿真结果验证了所提算法在提取成功率和提取精度上具有较好的折中,同时讨论了在不同条件下算法的提取性能。
1 传感器网络中盲源分离模型
考虑传感器无簇网络中的瞬时混合模型有N个观测节点,第n个观测信号可表示为:


对观测信号的量化处理,一般可采用最优量化方法和均匀量化方法。最优量化方法需要预知源信号的概率分布且计算量大,而均匀量化方法计算量小但所引进的噪声相对较大[10]。本文所设的传感器观测节点的计算和处理能力有限,且所采用的代价参考粒子滤波方法可以降低对噪声的敏感度,因此采用简单的均匀量化方法来处理观测信号。设观测节点上的量化比特为Mi,其观测信号为有界信号且取值范围为[−C,C],量化电平为l= 2Mi,量化步长为Δl,可得:

则量化后的观测信号和量化噪声分别为:

盲信号提取的求解过程是找到一个提取列向量w,使得恢复后的分离信号与源信号相似:

假设第j个源信号的映射方程已知:

将式(7)带入式(8),可得:

式中,uk−1为Uk中所对应的噪声分量。
文献[6,8-10]指出,若观测信号的混叠系统为时不变系统,则分离矩阵同样具有时不变特性,即提取向量w为时不变向量。至此,可得到关于提取向量w的状态空间方程:

通过非线性滤波方法求解得到提取向量w,进一步可得到第j个恢复的源信号
2 基于容积点变换的代价参考粒子滤波提取方法
代价参考粒子滤波是一种基于蒙特卡洛理论的非线性滤波方法,文献[14-16]给出了一种粒子代价函数和风险函数R(⋅)的定义方法:
为了进一步得到粒子重采样概率和后验权重,CRPF算法定义了粒子风险值的权值映射函数:
为了提高预测粒子的精确度,采用容积点规则来完成粒子的预测变换。基于对粒子代价函数C(⋅)、风险函数R(⋅)和权重映射函数的定义,CRCPF算法流程可描述为:
1)粒子初始化
设从有界均匀分布[−C,C]中采样得到Np个初始向量粒子则:

式中,E[⋅]表示数学期望;为粒子方差矩阵。设初始化粒子代价值可得初始粒子代价集
2)k时刻粒子容积点变换
3)粒子更新和重采样
4)k+1时刻粒子传播和代价更新
为保持采样粒子的多样性,k+1时刻的粒子以式(27)采样得到:

5)信号提取

至此,由上式可得k+1时刻的提取向量

,k为第j个提取的源信号。
3 仿真与分析
通过计算机仿真来验证所提算法的提取性能,设计在传感器网络的无簇模型中对瞬时混合信号进行盲信号提取,同时采用CKF算法和CPF算法与所提出的算法进行对比分析。
在传感器网络无簇模型中,首先对所提算法的有效性进行验证。设源信号为一组包含两个信号的混沌映射:
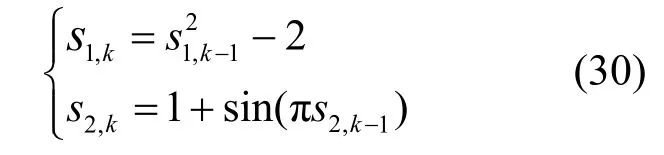
其可逆系数矩阵A随机产生,其他参数设置为:粒子数量为了定量的衡量算法性能的优劣,本文给出了MSE(mean squared error)作为参考指标:

式中,Ns为信号长度。此外,在实验过程中通过直观对比发现,当MSE<−15 dB时算法所得到的提取信号波形与源信号接近,而当MSE>−15 dB时提取的信号与源信号差异较大。因此,为更全面地反映算法性能,定义算法的提取成功率ρ作为另外一个衡量指标:

设仿真实验中的观测噪声由式(33)生成:

3.1 算法的有效性
设计第一组实验来验证算法的有效性,不对观测信号进行量化处理,即数据融合中心所收到的信号为传感器节点所采集的原始信号。
算法根据源信号映射方程每次提取一个源信号,图1为当观测节点数量N=2时,源信号和文中所提算法的仿真结果。其中,图1a和图1b为源信号图1c和图1d为混合信号x1,k和x2,k,图1e和图1f为根据源信号的映射方程同时得到的提取信号图2为各信号所对应的相图表示。其中,图2a和图2b为为源信号s1,k和s2,k的相图,图2c和2d为混合信号的相图,图2e和2f为提取信号的相图。由结果可知,文中算法可有效提取源信号,其提取成功率为提取成功时的平均MSE值为−26.113 3 dB。
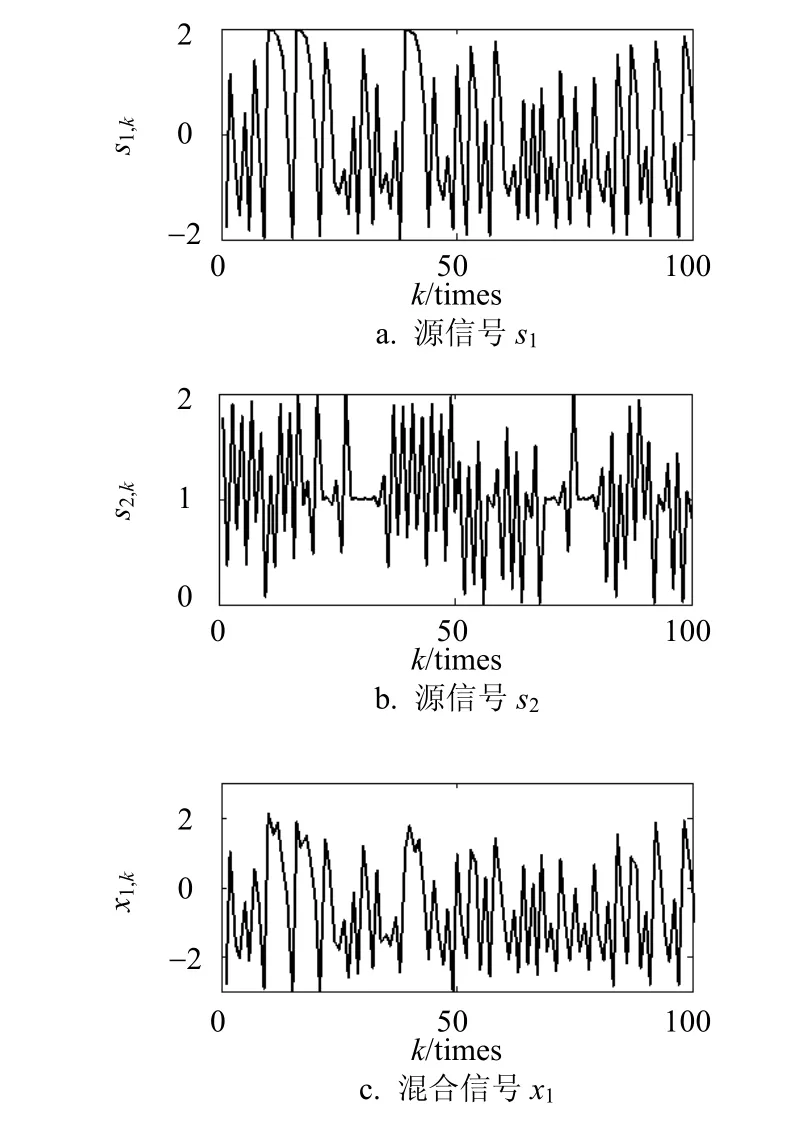
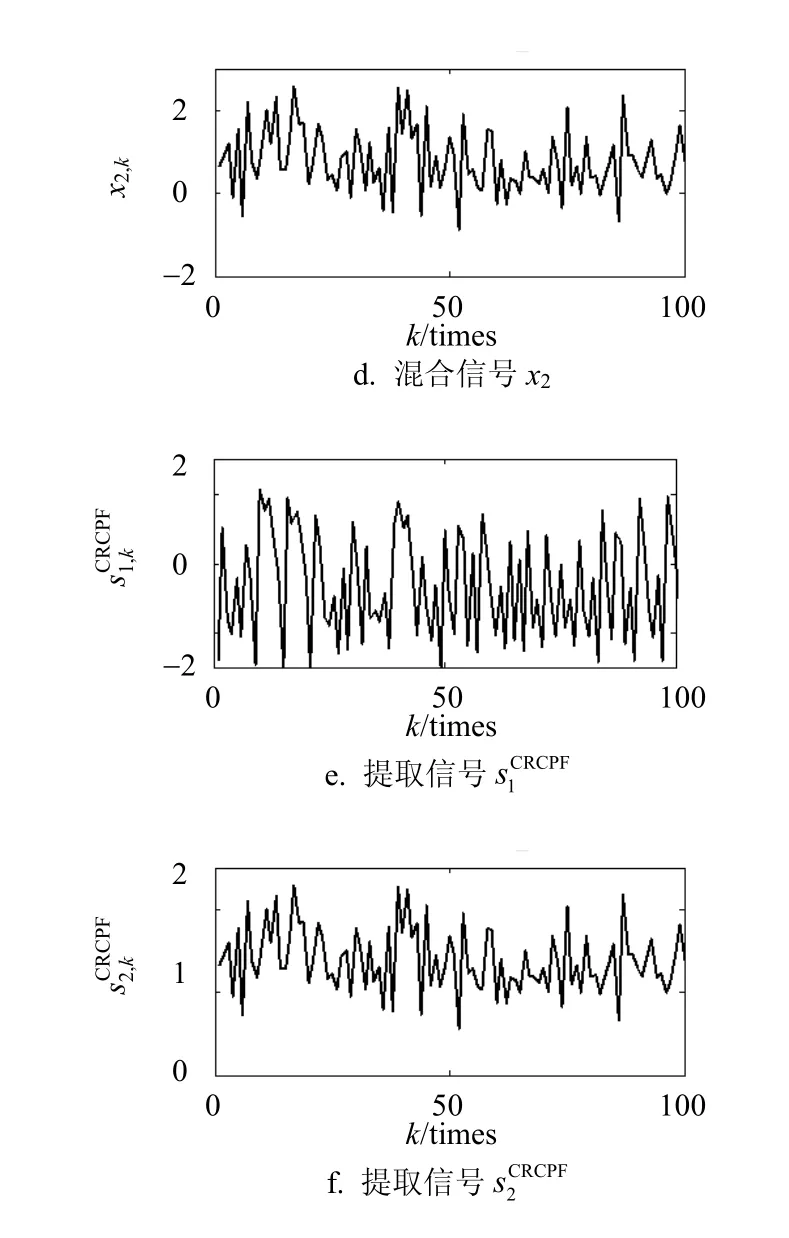
图1 源信号、混合信号和提取信号
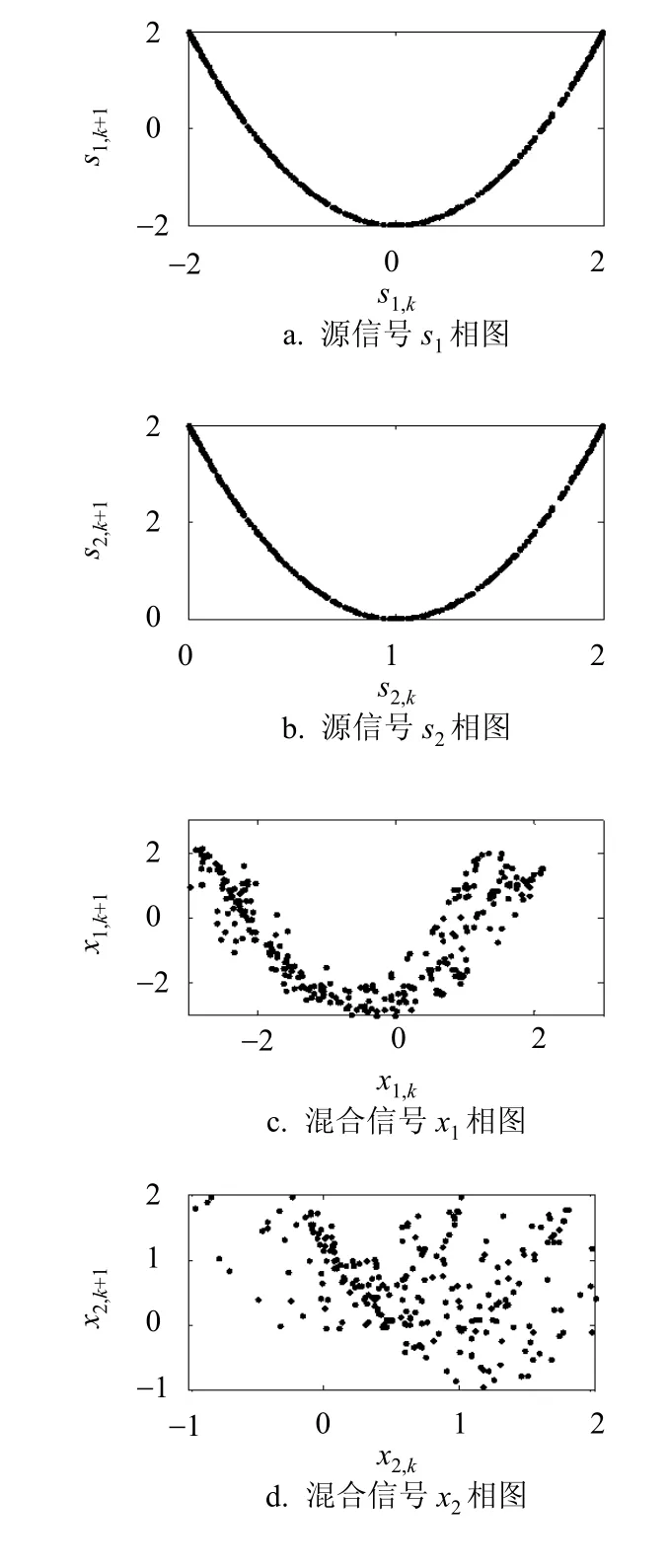
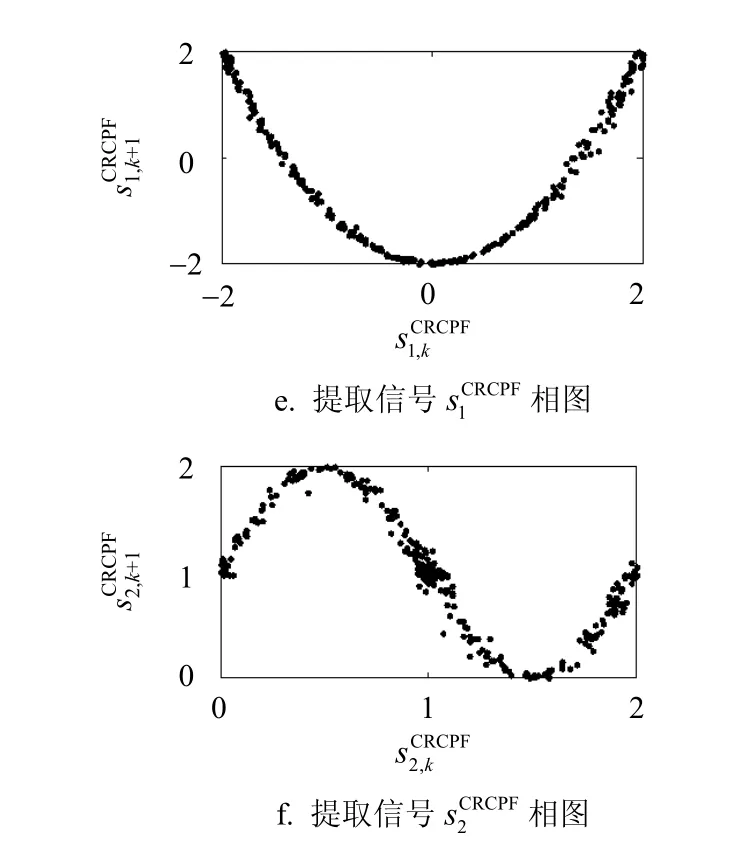
图2 源信号、混合信号和提取信号的相图
3.2 噪声已知时的提取结果
图3 为观测节点数量N=2、噪声由式(33)产生时,CKF、CPF和CRCPF 3种算法在盲信号提取成功时平均MSE与量化比特Mi的关系。由仿真结果可知,随着Mi的增大3种算法的提取精度均有所提升,CPF算法的提取精度要优于另外两种算法。在时,CPF和CRCPF算法的提取精度均较低,且CKF算法不能成功提取源信号。当量化比特3种算法的提取精度可分别达到−23.803 4 dB、−24.880 1 dB和−23.459 1 dB。
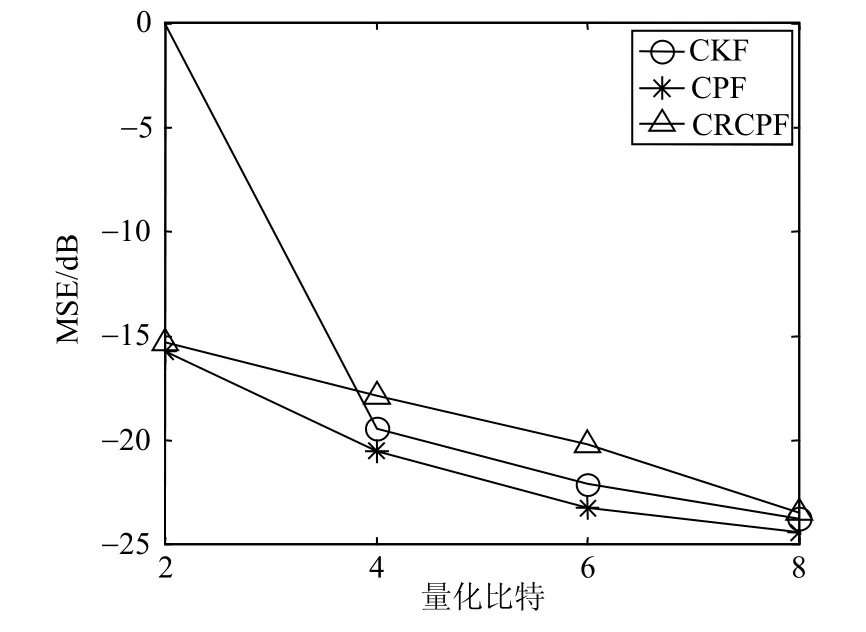
图3 噪声已知时算法MSE与量化比特Mi关系
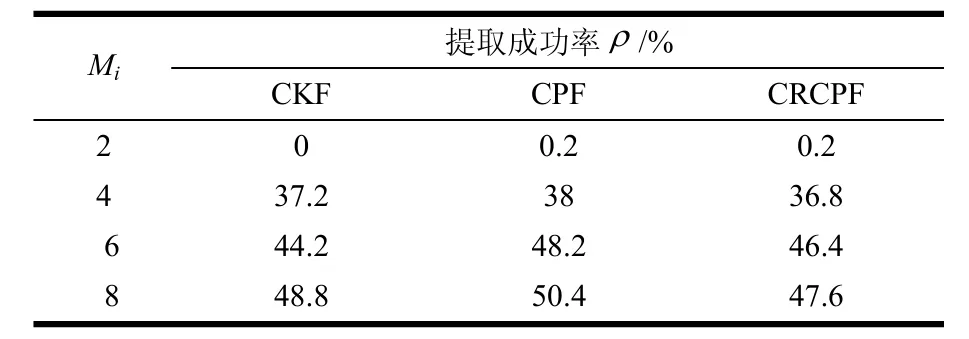
表1 噪声已知时算法在各量化比特下Mi的成功率
表1为观测节点数量N=2、噪声由式(33)产生时3种算法在不同量化比特时的提取成功率。当时,3种算法基本都不能正常提取,其原因是所引入的量化噪声过大而导致算法失效。另一方面,Mi的增大将耗费更多的计算量,即成功率的提升是以增加节点计算量为代价。
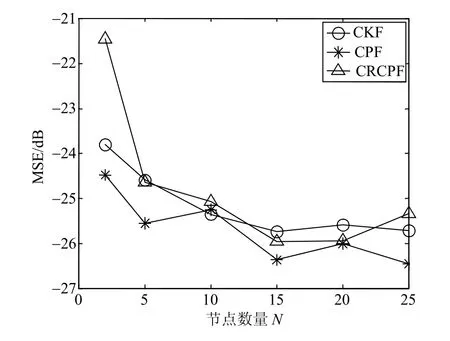
图4 噪声已知时算法MSE与节点个数N的关系
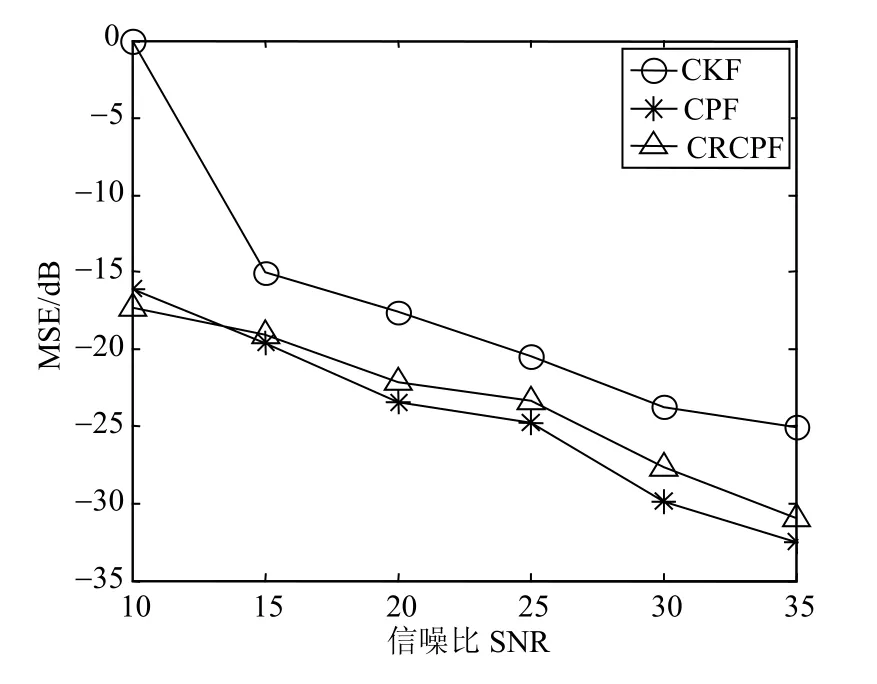
图5 噪声已知时算法MSE与SNR的关系
前组实验表明算法提取精度和成功率与量化噪声有关,设计本组实验进一步验证算法性能与观测噪声的关系。图5为节点数量N=2、量化比特且提取成功时,3种算法MSE与信噪比SNR的关系。由仿真结果可知,3种算法的提取精度MSE随着信噪比SNR的增大而明显提升,SNR对算法性能的影响与量化噪声具有相同的趋势。
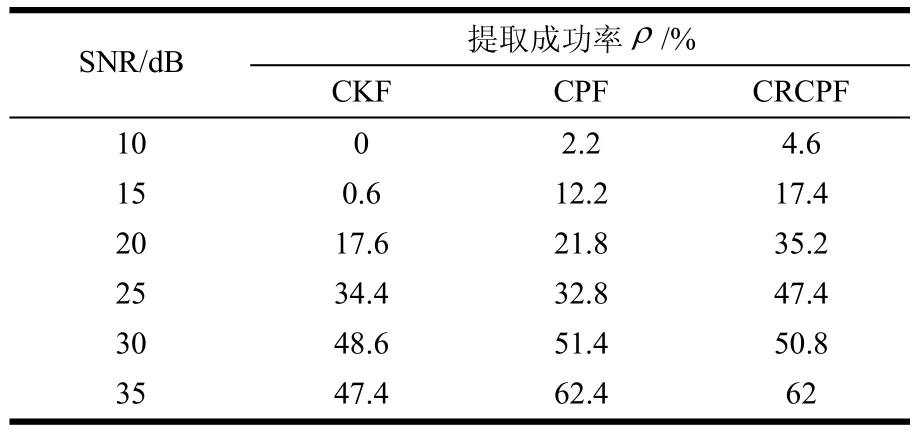
表2 噪声已知时算法在不同信噪比SNR下的成功率
表2为与图5相对应的算法成功率,CKF算法在信噪比SNR=10 dB时不能成功提取源信号。在相同条件下,CPF算法和CRCPF算法的提取成功率均高于CKF算法,CRCPF算法的提取成功率略高于CPF算法。
3.3 噪声未知时的提取结果
设计本组实验用来测试噪声统计特性未知情况下的算法提取性能。系数矩阵A随机产生,其他参数设置为:粒子数量观测噪声实际由式(33)产生,但在算法执行过程中假设未知。
图6为节点数量N=2、噪声方差假设为且源信号提取成功时,3种算法平均MSE与量化比特的关系。3种算法的提取精度随着节点Mi的增大而不断提升,但在量化比特时均不能成功提取源信号,其整体趋势与噪声已知条件下基本一致。
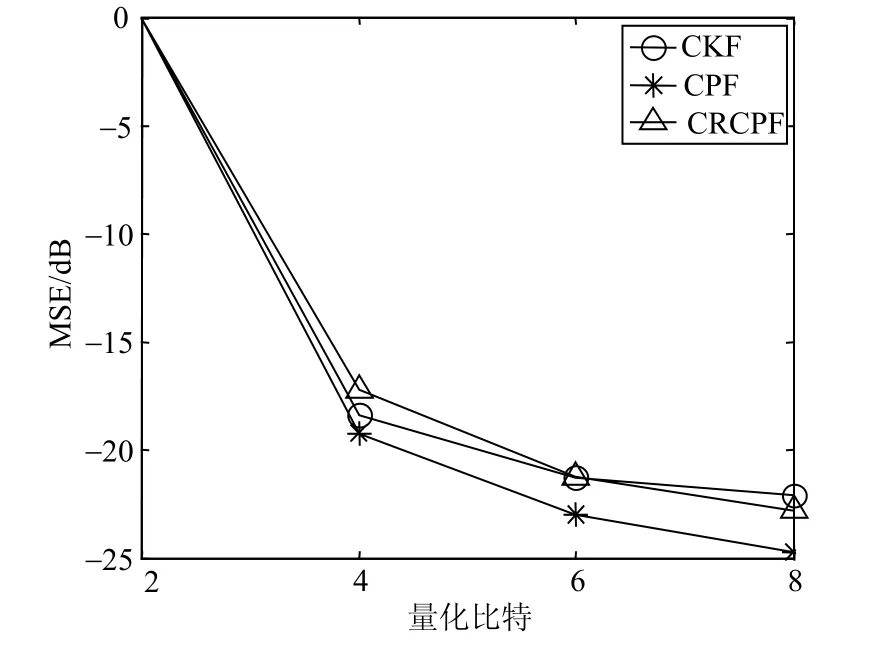
图6 噪声未知时算法MSE与量化比特Mi的关系
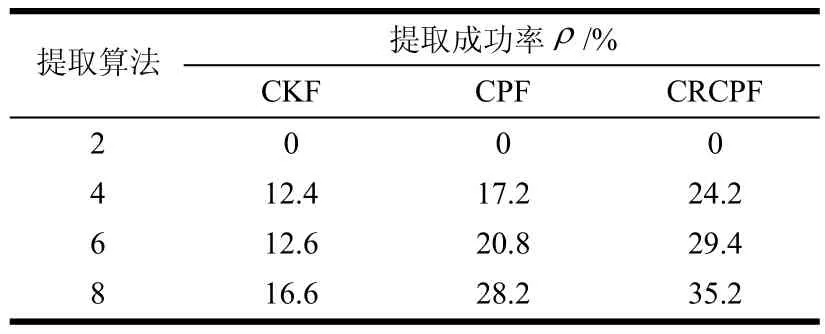
表3 噪声未知时算法在各量化比特Mi下的成功率
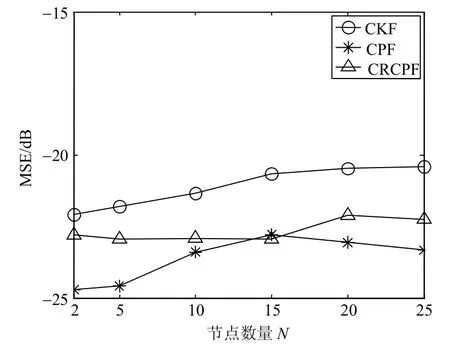
图7 噪声未知时算法MSE与节点个数N的关系
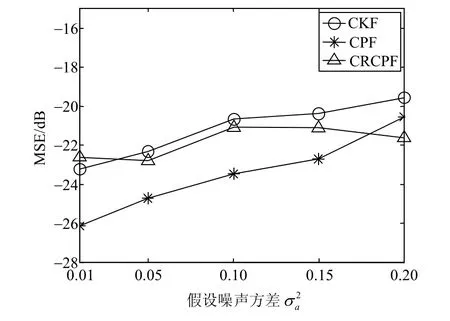
图8 算法MSE与假设噪声方差 关系
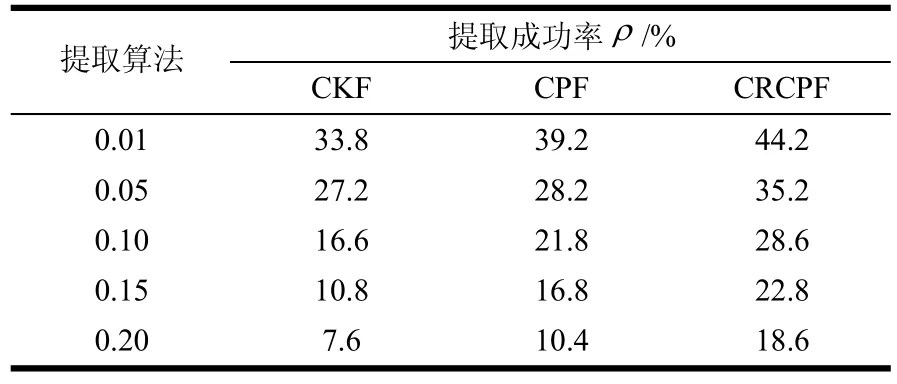
表4 不同假设噪声方差 2aσ时算法的成功率
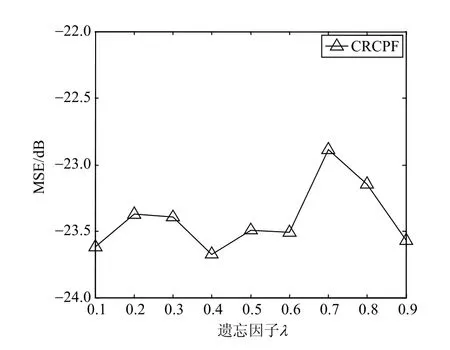
图9 算法成功率与遗忘因子λ的关系
在粒子风险函数和代价函数中,遗忘因子作为调节前一粒子代价和风险对当前粒子代价和风险值的影响程度,受到如假设噪声方差、量化噪声、观测信号冗余信息等诸多因素的影响,因此设计本组实验测试文中所提CRCPF算法在不同遗忘因子λ下的提取性能。图9为当量化比特节点数量假设噪声方差算法在各λ下的平均MSE值。从仿真结果可以看出,遗忘因子λ对源信号提取成功时的提取精度影响较小,各λ值下的平均精度为
表5为相同参数条件下不同遗忘因子值时的提取成功率,遗忘因子λ=0.5时提取成功率较高。

表5 CRCPF算法在不同遗忘因子λ下的成功率
4 结束语
在噪声和源信号统计特性已知时,传统的CKF和PF等算法均能有效处理复杂的非线性信号估计问题,但在实际应用中观测信号很容易被量化、信道畸变等因素影响,从而导致非线性滤波递推过程出现较大误差。CRPF方法的提出,极大减少了算法对噪声统计特性的依赖。针对传感器网络中节点带宽受限时的盲信号处理问题,本文基于CRPF提出一种不依赖于噪声统计特性的盲源提取方法。仿真结果表明,本文算法在混合噪声难以准确数学建模时能够有效提取源信号。在假设的不同混合噪声统计特性下,本文算法的折中提取性能均优于传统的CKF算法和CPF算法。但本文只考虑了简单的传感器网络无簇模型和节点带宽受限条件,诸如网络能耗、数据丢包、信道畸变等更多限制条件下的盲信号提取问题是下一步研究的重点。
猜你喜欢
当代水产(2022年6期)2022-06-29
中国生殖健康(2020年8期)2021-01-18
测控技术(2018年10期)2018-11-25
中国生殖健康(2018年3期)2018-11-06
浙江工业大学学报(2017年5期)2018-01-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
海峡姐妹(2015年5期)2015-02-27
电子设计工程(2014年20期)2014-02-27
物理与工程(2014年4期)2014-02-27