面向位置服务的室内三维模型数据组织
2018-10-17 02:03:04黄悦莹曾桂香张鹏程杨卫军
地理信息世界 2018年6期
周 艳,黄悦莹,曾桂香,张鹏程,杨卫军
(1. 电子科技大学 资源与环境学院,四川 成都 611731;2. 广州市城市规划勘测设计研究院,广东 广州 510060)
0 引 言
目前,以空间位置为基础的位置服务已经成为新兴服务产业的重要组成部分,也是未来移动应用的第二大发展方向[1]。随着数字城市的不断发展与建设,人们对位置服务的需求不再满足传统的室外空间,室内位置服务逐渐成为关注的重点,未来大型建筑物的室内三维模型技术发展必须支持互操作、智能化等多功能应用[2-4],因此,与室内位置服务相关的室内三维空间模型研究已经引起人们的极大关注,成为了国内外研究前沿和热点。
大多数室内三维模型数据组织研究主要面向室内空间可视化应用[5-6],较少考虑三维模型中丰富的语义信息和拓扑信息,对室内空间位置服务的专题查询导航、分析等支持有限。因此,如何有效地组织室内三维模型数据以更好地满足位置服务应用需求,成为亟需解决的重要问题。为此,本文面向室内位置服务提出一种顾及语义拓扑的数据组织方法,并以典型室内路径规划应用为例说明方法的有效性。
1 室内空间位置模型表达
本文基于室内空间位置模型(Indoor Space Location Model,ISLM)进行室内空间位置表达,ISLM是基于IndoorGML[7]标准核心模块的扩展表达模型,从几何、拓扑和语义位置3个方面对室内三维空间实体进行模型表达,模型描述可参考相关文献[8],本文此处不赘述。图1表示了ISLM拓扑表达的三层拓扑结构及其之间的连接关系,其中,基本拓扑层基于庞加莱二元性变换理论表达了室内单元空间之间的连通关系;距离拓扑层采用IndoorGML标准的厚门模型(Thick Door Model),将门作为单元(Cell)实体从基本拓扑层结构推导而得“门-门”模型,可实现室内空间任意两点位置距离计算;位置拓扑层采用中轴转换方法将走廊、过道等语义空间抽象为一维的直线,此时以室内位置服务用户在走廊中的自我中心为方向基准对过道两边的单元空间表达对应的语义相对位置信息。基本拓扑层通过层间连接与距离拓扑层和位置拓扑层进行关联。

图1 ISLM三层拓扑结构Fig.1 3-layer topology structure of ISLM
2 顾及语义拓扑的室内三维模型数据组织
从面向位置服务的角度出发,本文将室内三维模型中的空间对象与构件对象作为模型组织关注的重点,将空间要素抽象为对偶空间中的节点与边,通过基本拓扑、距离拓扑和位置拓扑对室内三维模型进行数据组织。
2.1 室内三维模型的语义空间要素数据组织
本文将室内三维空间内的要素分为构成建筑物基本单元的构件对象和具有一定空间容器功能的空间对象。如图2所示,将空间对象中的单元空间划分为房间、水平通道和竖向通道三类语义空间;具有空间分割功能的墙、天花板等构件对象与空间对象组织成一个有机整体;通道口作为位置服务中特殊的构件对象需要显式组织,为了避免数据结构冗余,将水平通道口(出入口、门等)和竖向通道口(电梯口、楼梯口、扶梯口)抽象为拓扑结构中的点要素进行组织。由于室内火灾应急情况发生时,窗作为特殊的语义通道口发挥重要的作用,因此空间要素数据组织中考虑了窗户的通道口语义。
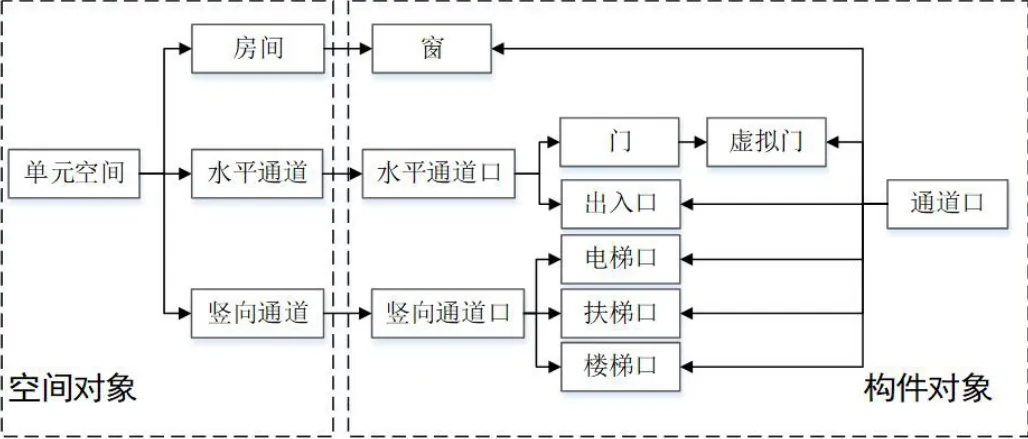
图2 室内三维模型语义空间要素层次划分Fig.2 Hierarchical division of semantic spatial elements in indoor 3D models
2.2 室内三维模型拓扑关系组织
室内三维模型拓扑关联关系主要由原始空间抽象成对偶空间的节点和边组成,拓扑关系节点和拓扑关系边的类型与定义分别见表1和表2,其中,拓扑结构表示节点或边的抽象类型与本文表达的拓扑关系层相对应。以下分别介绍三层拓扑关系的数据组织,基本拓扑层与距离拓扑层的数据组织关系如图3所示。

表1 拓扑关系节点类型和定义Tab.1 Types and def i nitions of topological relationship nodes
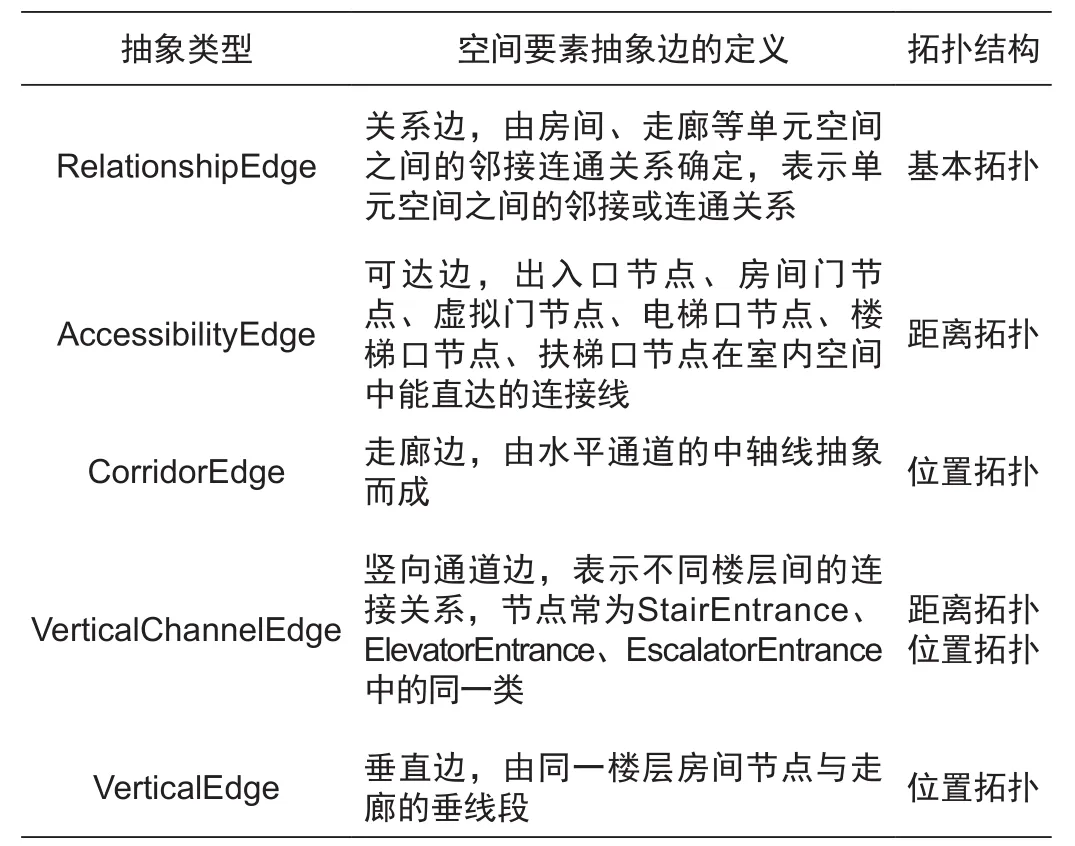
表2 拓扑关系边的类型和定义Tab.2 Types and def i nitions of topological relationship edges
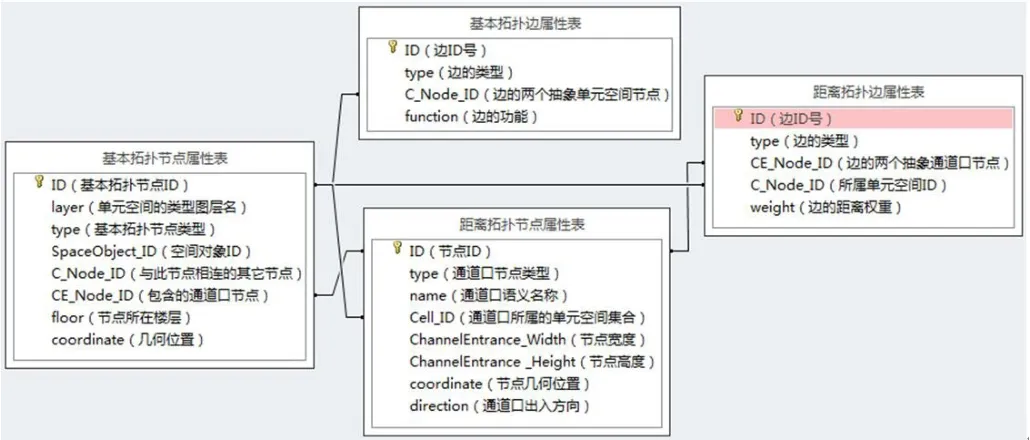
图3 基本拓扑与距离拓扑的数据组织Fig.3 Data organization of foundation topology and distance topology
1)基本拓扑层
基本拓扑节点属性表保存了由室内单元空间抽象而成的所有节点,layer属性与语义空间要素组织的房间信息表、水平通道表、竖向通道表相对应,每一张表对应一个图层;type为对应的拓扑节点类型;SpaceObject_ID表示单元空间对象ID,通过该属性与单元空间信息相关联的语义位置属性,实现单元空间的语义位置信息组织;C_Node_ID表示与该节点相邻的其他单元空间节点ID,是对空间邻接关联关系的组织;CE_Node_ID表示该单元空间节点包含的距离拓扑层中通道口节点的集合,隐含了空间边界关联关系的组织;floor表示该单元空间节点所在楼层;coordinate表示该节点的抽象几何坐标位置;基本拓扑边属性表组织管理单元空间节点之间的空间关系(如两个房间的邻接或连通关系等)。
2)距离拓扑层
距离拓扑层实现了“通道口-通道口”的连通关系和单元空间之间的语义距离位置的组织,其中,单元空间之间的语义距离位置通过位于单元空间边界的通道口之间的距离进行度量。距离拓扑层分别定义了距离拓扑节点属性表和距离拓扑边属性表,字段含义如图3所示。距离拓扑节点属性表主要对窗户以外的所有通道口进行几何语义属性的定义,其中Cell_ID表示通道口所属的基本拓扑边属性表中的单元空间节点,direction表示通道口出入方向(direction为-1时表示只出不进、为1时表示只进不出、为0时可进可出);距离拓扑边属性表中边的权重是由欧式空间几何位置确定的空间距离。
3)位置拓扑层
位置拓扑层将走廊、过道等水平通道和竖向通道抽象为以室内位置服务用户为中心的语义位置描述,通过水平或竖向通道的连接方向判断通道两边房间节点的语义相对方向和语义相对顺序,以用户为中心建立类似“走廊左边第一个房间”的描述方式,其中“左”和“第一个”为语义相对方向和顺序的位置描述的关键词。
位置拓扑层中节点包含表1所定义的房间节点Room和走廊上的水平通道节点CorridorNode及竖向通道上的楼梯口节点StairEntrance、电梯出入口节点ElevatorEntrance、扶梯出入口节点EscalatorEntrance,边包含走廊边CorridorEdge和竖向通道边VerticalChannelEdge,为了直观上的图形理解,也将同一楼层房间节点与走廊的垂线段VerticalEdge作为位置拓扑层中的边。以下通过示例阐述二维位置拓扑层的语义相对位置组织。如图4所示,走廊和连接房间与走廊的垂线段作为位置拓扑层中的边,房间和走廊上的端点、交叉点作为位置拓扑层中的节点,边和节点的数据表结构见表3和表4。

图4 位置拓扑层空间要素抽象示意图Fig.4 Schematic diagram of spatial elements of location topological layer

表3 位置拓扑边属性表示例Tab.3 Example of locationEdge_table

表4 位置拓扑节点属性表示例Tab.4 Example of locationNode_table
表3中保存了位置拓扑层中通道边的属性信息,表中示例1和示例2分别为图4中的走廊CN1—CN2和走廊CN3—CN4。type表示拓扑边的类型,CN_Node_ID和direction属性共同定义了通道的方向。表4保存了位置拓扑层中节点本身的几何语义信息,也包含相对于通道边的语义位置属性,表中示例1和示例2分别为图4中的房间节点R1和水平通道走廊上的交叉点CN2,ID为该节点的ID号;type表示该节点所属类型;RoomObject_ID表示该节点对应的房间ID号,当节点类型为Room时,通过该属性可与房间单元空间相关联从而访问其基本语义位置属性;corrdinate表示该节点的几何位置;ChannelEdge_ID是表3中存储的与该节点相邻的通道边ID;Direction_Desc表示该节点对邻接通道边的语义方向相对位置,表述为[通道边ID,{方向,正序号},{方向,反序号}],其中第一个参数表示与该节点相邻的通道边ID,即为位置拓扑节点属性表的ChannelEdge_ID属性,第二个参数为以第一个参数的正序方向的语义方向描述,第三个参数为以第一个参数的反序方向的语义方向描述;Order_Desc表示该节点对邻接通道边的语义相对顺序位置,表述为[通道边ID,{顺序,正序号},{顺序,反序号}],第一个参数表示与该节点相邻的通道边ID,第二个参数为以第一个参数的正序方向的语义顺序描述,第三个参数为以第一个参数的反序方向的语义顺序描述。
3 面向位置服务的室内三维模型应用实验
为验证本文提出的面向位置服务的室内三维模型数据组织方法的有效性,以图5a所示的建筑物为实验对象,根据室内空间位置模型ISLM表达的拓扑关系进行建模,室内三维模型的三层拓扑网络结构如图5b、5c和5d所示。基于顾及语义拓扑的室内三维模型数据组织方法为各空间要素建立语义位置属性,按照真实值添加属性值,然后以面向位置服务的室内路径规划典型应用为例,验证本文提出的室内三维模型拓扑表达与组织方法的有效性。
本实验采用Dijkstra算法[9-10]实现室内路径规划,设置出发点和目标点分别为“建筑正门入口”和三楼“会议室”,通过距离拓扑节点属性表的通道口名称和房间信息表的房间名称分别确定出发点和目标点的所属空间要素类型ID号,利用房间信息表、基本拓扑节点属性表及距离拓扑节点属性表三者的相互关联关系确定出发点和目标点在距离拓扑层中的节点映射,最优路径规划结果如图6所示。
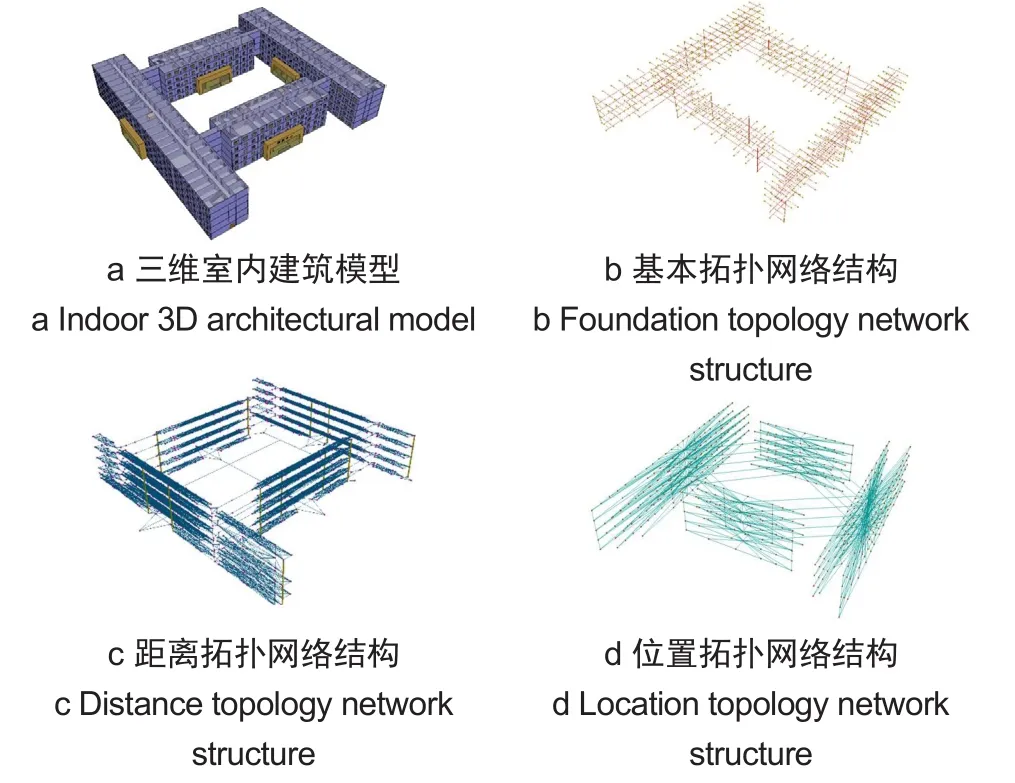
图5 室内三维模型以及三层拓扑网络Fig.5 Indoor 3D model and 3 layer topology network
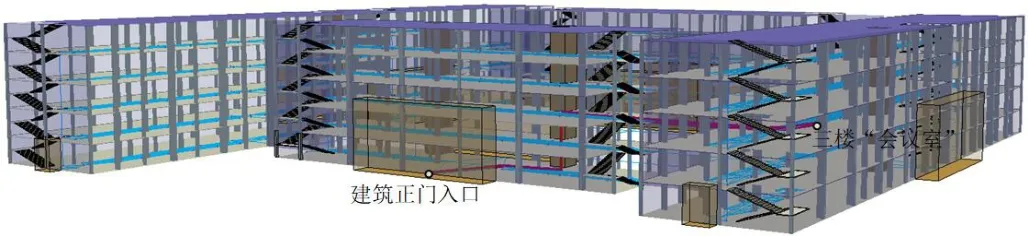
图6 室内三维路径表达Fig.6 Indoor 3D path expression
为了说明位置拓扑层在室内路径规划应用中的作用,本文基于路径规划结果和位置拓扑表达实现自然语言的路径表达。自然语言路径描述的方式能将丰富的语义信息以生动自然的方式表现出来,与三维模型路径图相结合可以为用户提供图文并茂的表达方式,更符合用户的认知习惯。自然语言路径表达的关键步骤如下:
1)路径拐弯节点提取:在同一水平面上,根据距离拓扑节点表和边表判断相邻的两个路径片段是否属于同一单元空间,如果不是,则中间路径节点为拐弯节点;在垂直方向上,若第三个路径节点高程大于第一个路径节点高程,则第二个路径节点即为向上的竖向通道拐弯节点;
2)拐弯方向判断:拐弯方向判断需要先根据已知距离拓扑层中的规划路径方向判断在位置拓扑层中的规划路径所在的走廊方向,将规划路径所在走廊定为某个方向的投影坐标轴,若(拐弯节点下一个节点在走廊的投影坐标-拐弯节点在走廊的投影坐标)&&(走廊终点投影坐标-走廊起点投影坐标)为真,则走廊假设的行进方向与规划路径方向同向,否则为相反方向;进而通过走廊起点与终点确定的向量与规划路径向量的叉乘,根据向量的叉乘右手定则,确定用户以自我为中心的转弯方向;
3)路径起点的自我中心方向确定:前面的拐弯方向判断是针对路径的中间节点,路径中间节点的用户自我中心方向可通过前一路径片段确定,而以同样的方法无法确定路径起点的自我中心方向,本文以人工的方式确定路径起点的自我中心方向,特别注意跨楼层导航时自我中心方向的改变,如进电梯前和出电梯后的自我中心方向相反。
最后对提取的路径节点描述信息及路径描述辅助性词汇进行拼接,路径规划结果的自然语言描述为:“从起点出发,向右转到走廊第一个电梯,向上到三楼,左转到走廊尽头,左转到走廊右边第二个房间”,这与室内三维模型的最优路径规划导航情况相一致,说明了语义导航的有效性。
4 结束语
本文面向室内位置服务应用需求,实现了面向位置服务的室内三维模型规范化表达,提出了顾及语义拓扑的室内三维模型组织方法,并进行了实例化室内三维建模,考虑到室内位置服务的多样性及其技术的复杂性,本文以室内路径规划典型应用为例,验证了本文提出的室内三维模型数据组织方法的有效性,未来可以考虑更为复杂和多样性的室内位置服务应用,以充分利用室内三维模型的丰富语义空间关系,进一步验证本文模型和方法的适用性。
猜你喜欢
第二课堂(课外活动版)(2022年4期)2022-04-23 21:16:19
文苑(2020年4期)2020-05-30 12:35:20
开放教育研究(2020年2期)2020-03-31 01:54:14
小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:56
中国公共安全(2017年7期)2017-10-13 08:18:19
中国公共安全(2017年8期)2017-10-13 08:12:24
现代语文(2016年21期)2016-05-25 13:13:44
全球定位系统(2015年4期)2015-02-28 12:38:15
大连民族大学学报(2015年2期)2015-02-27 08:28:11
学生天地·小学低年级版(2014年12期)2015-01-17 09:35:20